并联混合动力汽车BSG控制策略研究*
2019-07-19宋大凤高福旺曾小华陈慧勇王印束
宋大凤 高福旺 曾小华 陈慧勇, 王印束
(1.吉林大学,汽车仿真与控制国家重点实验室,长春 130025;2.郑州宇通客车股份有限公司,郑州 450061)
主题词:并联混合动力汽车 皮带传动起动/发电一体化电机 调速控制 稳定发电 控制策略
1 前言
随着能源短缺和环境污染问题日益严重,发展新能源汽车成为各国政府和企业的重点方向[1-3]。混合动力汽车因其具有节能潜力大、对电池要求低等优势成为过渡时期的最佳选择[4]。其中,并联混合动力汽车(Parallel Hybrid Electric Vehicle,PHEV)避免了串联构型能量二次转换、综合效率较低的缺陷,且相比混联式构型结构更加简单,易于控制。
混合动力汽车由于多动力源的存在,可以发挥出更佳的动力性,在车辆起步阶段合理协调各动力源可以缩短车辆起步时间,提高车辆加速品质;同时,在行驶过程中回收制动能量可以保证电池SOC平衡,提高整车的经济性,这都需要合理的控制策略来协调各动力源。
国内针对BSG起动发动机及发电开展了很多研究:合肥工业大学的徐立强[5]等人建立了BSG驱动仿真模型,并开展了起动助力、加速助力和能量回收等试验;叶先君[6]等人对比了有无BSG参与下车辆的动力性、经济性;邹小松[7]等人根据NEDC工况,利用ECU采集数据设计BSG起动、发电控制策略。
国内针对BSG的研究着眼于部件的实车测试和基于理论工况的BSG控制研究,而没有系统地提出适用于全工况的BSG控制算法。为解决该问题,本文在某配备起动发电一体机(Integrated Starter and Generator,ISG)的P2构型并联混合动力汽车上增加BSG,并基于BSG的功能和性能要求,开展了电机及皮带轮的参数匹配设计,基于MATLAB/Simulink平台建立了两段式起动调速控制策略和稳态发电控制策略,以期提高整车动力性能,并搭建试验样车开展了道路试验验证。
2 动力系统
2.1 车辆构型
本文在某P2+CVT构型的并联混合动力汽车基础上提出增加BSG实现P0+P2构型的方案,结构如图1所示,以实现快速起停和低速发电功能。原并联混合动力汽车的基本参数如表1所示。
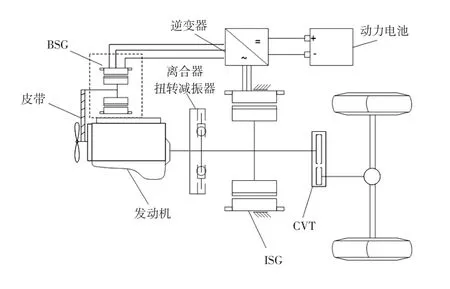
图1 车辆动力系统构型
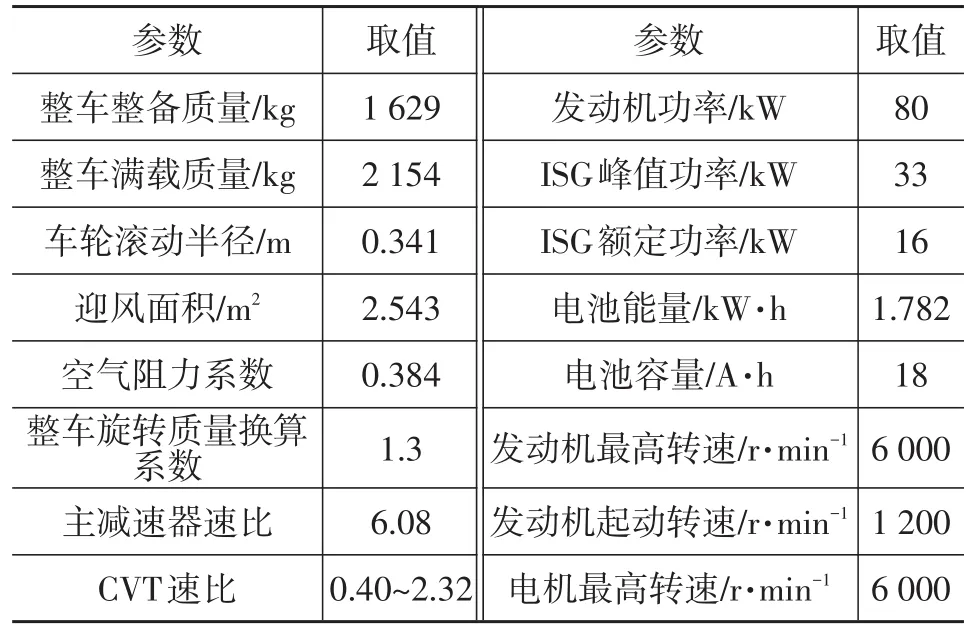
表1 整车参数
在该构型中,BSG的主要功能是起动发动机辅助调速和小功率发电。BSG通过皮带与发动机曲轴前端相连,与发动机构成BSG-发动机起动发电系统。当BSG起停条件使能时,电机快速响应,通过皮带传动辅助发动机快速提速,加快起动调速过程,快速完成同步,使离合器更快接合,从而提高车辆动力性;当BSG发电条件使能时,通过BSG与发动机间的目标转速/转矩配合控制,发动机机械能经皮带传递至BSG,电机工作在发电模式为电池充电或为ISG供电,可辅助维持电池SOC稳定,增加纯电行驶里程,提高整车经济性。
2.2 BSG及皮带轮参数匹配
为实现BSG的选型,需要匹配计算获得电机峰值功率、额定功率、最大转矩和最高转速等参数,同时需要计算皮带轮速比。皮带轮速比主要对BSG起到减速增扭的作用,并不改变系统功率等级[8],故匹配计算时可先将BSG与带轮视为整体,即暂时按速比为1进行电机参数匹配,待计算完成后再根据电机的转速、转矩选取合适的带轮速比。
结合功能需求确定BSG参数匹配计算的原则为:起动发动机时BSG工作于恒转矩区,以减小其转矩能力要求;BSG基速点不小于发动机起动目标转速;BSG最高转速不小于发动机最高转速;BSG峰值功率满足起动发动机的功率需求。
根据以上匹配计算原则,BSG起动发动机时,其转矩应满足:

式中,Tm_bsg为BSG峰值转矩;Ie为发动机曲轴转动惯量;ne为发动机转速;Tef为BSG拖动发动机起动时的阻力矩。
为提高并联系统起动速度,设定BSG在0.3 s内将发动机提速至1 200 r/min,按照恒角加速度计算得到的需求转矩为61 N·m,即BSG的峰值扭矩不低于61 N·m。
在将带轮传动速比与BSG统一考虑的前提下,BSG转速应满足:最高转速不低于发动机最高转速;额定转速不小于发动机起动转速;根据系统发电需求,BSG的高效区应与发动机高效区相匹配,以提高发电效率;最高转速与基速的比值不能过大,一般在2~4范围内,即当电机处于最高转速时,BSG额定转速不应低于1 500 r/min。
依据上述限定条件,暂定BSG的额定转速为2 000 r/min,结合峰值扭矩要求,计算可得BSG的峰值需求功率为13 kW。
上述匹配过程将带轮速比考虑在电机内部,而实际情况下带轮速比会导致BSG的转速、转矩工作点移动[9],如图2所示。随着带轮速比逐渐增大,BSG转矩需求减小,但其最高转速和额定转速需求均有所提高。

图2 带轮速比对BSG转速、转矩的影响
结合当前市场上已有产品,选择的带轮速比为1.5。BSG的参数匹配结果如表2所示。
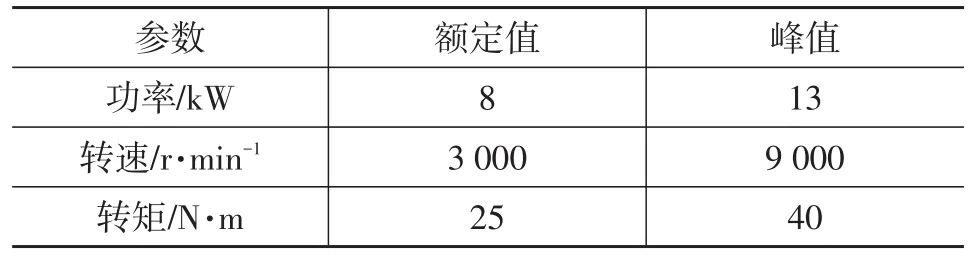
表2 BSG参数初定
3 行驶模式
混合动力汽车是融合了机、电驱动系统于一体的复杂非线性动态系统,需实现各子系统间的统筹协调控制,并优化能量传递路径、提高系统效率。
本文所研究的并联混合动力SUV可实现12种主要行驶模式,如表3所示。
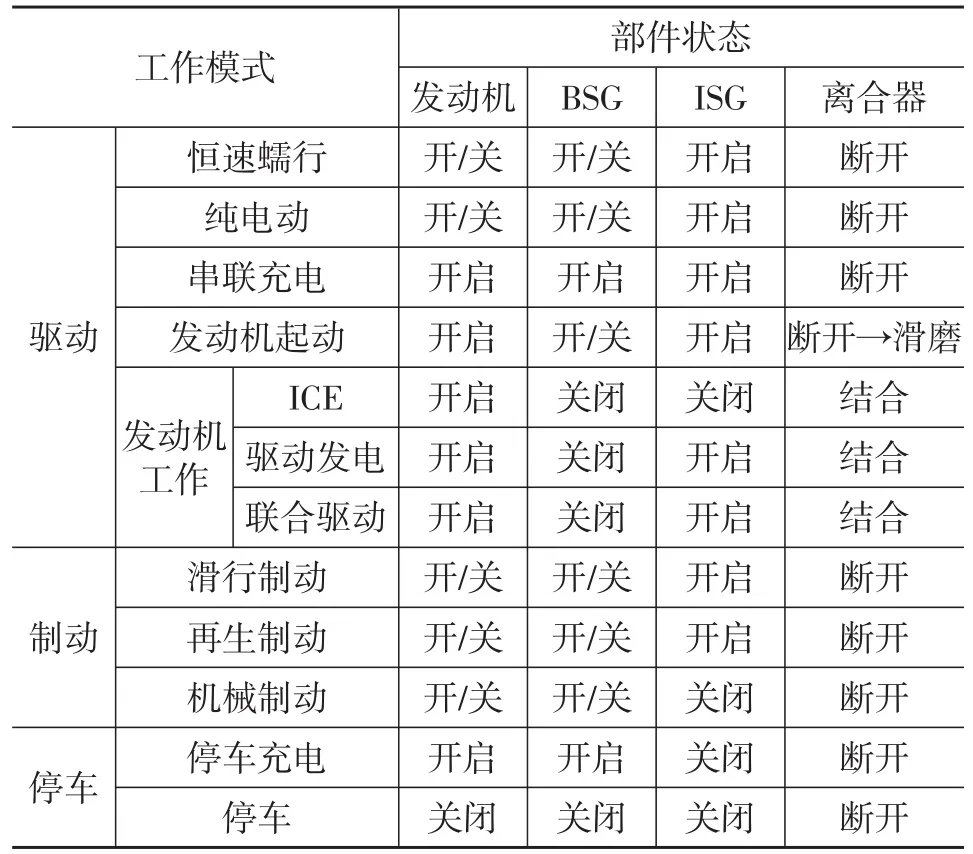
表3 各模式的动力系统主要部件稳态工作状态
在模式切换的动态过程中,需参考前一模式的部件状态进行过渡过程协调控制。例如,在联合驱动模式突然松开油门踏板,车辆将立即进入滑行制动模式。此时应首先控制发动机负荷使其迅速减小,待转矩清空后断开离合器,并适时关闭发动机,以保证纵向冲击较小。同理,在BSG发电过程中若车辆进入其他无需发动机参与的驱动、制动模式,BSG-发动机系统仍需继续维持稳定发电,以确保电池SOC稳定在合理范围。
由此,基于Simulink/Stateflow平台搭建车辆行驶模式仲裁控制算法,定义各行驶模式之间的切换路径和条件。
4 起动及发电状态控制
在并联混合动力汽车基础上增加BSG后,可实现发动机起动、辅助调速及小功率发电、维持低速纯电动行驶等功能。因此需要建立BSG起动发动机调速控制策略以及稳定发电控制策略。
4.1 起动发动机调速控制策略
当行驶车速较高、驾驶员需求转矩较大或电池SOC较低时,需要发动机工作,以维持电量平衡。由于BSG相比传统起动机功率更大,可受控调速,所以可缩短发动机起动时间,辅助发动机调速,使离合器主、从动盘快速完成同步,确保发动机动力尽快输出,进而改善车辆动力性。
依据发动机工作状态不同,BSG起动发动机控制主要可划分为提速和调速两个控制阶段:发动机静止至点火成功为转速控制阶段,其控制目标转速约为发动机稳定的怠速转速;发动机点火成功、可自行维持怠速至提速到稳态发电或离合器接合的目标转速为转矩控制阶段,目标转矩通过转速误差的PID控制计算获得,此阶段发动机处于转速控制模式,目标转速为设定的稳态发电转速或ISG实时反馈转速。
由此,BSG可迅速响应目标转速需求,确保车辆快速进入发电状态或离合器主、从动盘快速完成同步,从而完成起动控制任务。
4.2 稳定发电控制策略
当驾驶员在停车状态下需要较长时间使用电器或为电池充电时,混合动力控制单元(Hybrid Control Unit,HCU)可控制车辆工作在停车充电模式,其间发动机机械能可经皮带传递至BSG后转化为电能。同时,当车辆在其他无需发动机参与驱动的工作模式下行驶时,可通过断开离合器来继续维持BSG-发动机系统的稳定发电功能,以便实现长距离低速串联纯电动行驶或确保电池SOC稳定。
由此需要在BSG起动发动机后,控制发动机稳定输出动力,同时控制BSG工作在发电状态。而当车辆由于驾驶员的不同操作在停车充电、恒速蠕行、纯电动、滑行制动、再生制动等行驶模式间切换时,进入新的行驶模式后判断前一时刻发动机是否处于起动状态、电池SOC是否低于其最小阈值(30%),满足相应条件则继续维持BSG-发动机系统的稳定发电功能,直至电池SOC达到设计充电阈值(85%)或驾驶员的动力需求较大、发动机开始参与驱动为止。
由此,BSG即可快速进入发电控制状态,且在行驶模式不断切换过程中,仍能继续维持稳定发电功能,提高了系统鲁棒性。
4.3 整车控制策略
基于以上分析,建立了整车控制策略的Simulink控制算法模型,策略整体架构主要包括信号输入、信号处理、能量管理(主函数)和信号输出模块。其中,能量管理主函数模块为实现车辆状态识别、动力及传动部件控制的主要部分,其又可细分为驾驶员需求解析、故障诊断、系统约束、上下电逻辑、模式仲裁、转矩分配、附件控制7个主要部分,其中系统约束子模块依据车辆部件的工作状态及故障诊断结果,对系统动力输出进行一定比例的降额功率限制或关闭处理,实现容错控制,确保车辆安全运行。
5 实车测试
5.1 试验样车搭建
基于某配备ISG的P2构型并联混合动力汽车,参考图1所示的动力系统构型,改装获得试验样车,如图3所示。
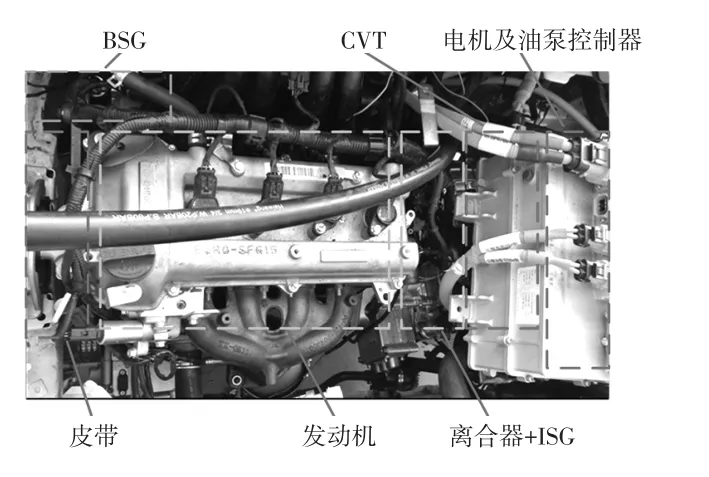
图3 试验样车动力系统布置
基于搭建的控制算法,配合CAN通讯接口,通过自动代码生成工具编译下载到德国TTControl公司的TTC200车载控制器作为HCU,并将其挂载到试验样车的整车CAN通讯网络中,与TCU、MCU、EMS及BMS等子控制器共同组成整车控制网络,同时对车辆行驶模式进行标定,结果如表4所示。
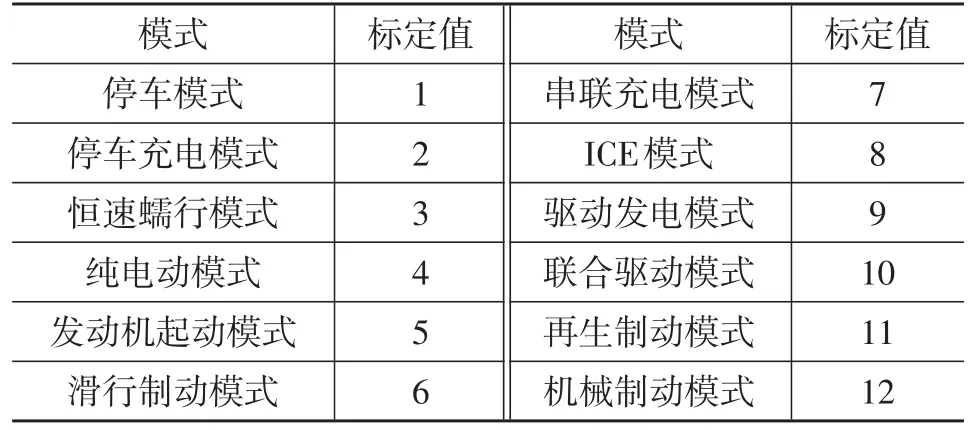
表4 各模式标定结果
5.2 起动调速控制实车测试
基于搭建的试验样车,在急加速工况下进行起动调速测试,各主要部件状态结果如图4所示。图4中,离合器状态0、1和2分别表示断开、滑磨和接合。
测试期间,车辆从模式1经模式4加速达到一定车速和驾驶员需求转矩后进入模式5,BSG在转速控制模式下迅速将发动机转速提高至起动目标转速,属起动调速第一阶段;而后发动机点火成功,离合器接合,发动机开始跟随目标转速(ISG实时转速),BSG进入转矩控制模式进行辅助调速,转速进一步升高,当转速差减小到设定阈值以下,离合器开始滑磨,属起动调速第二阶段;在完成转速同步、离合器接合后整车进入模式8,发动机开始参与驱动车辆行驶。
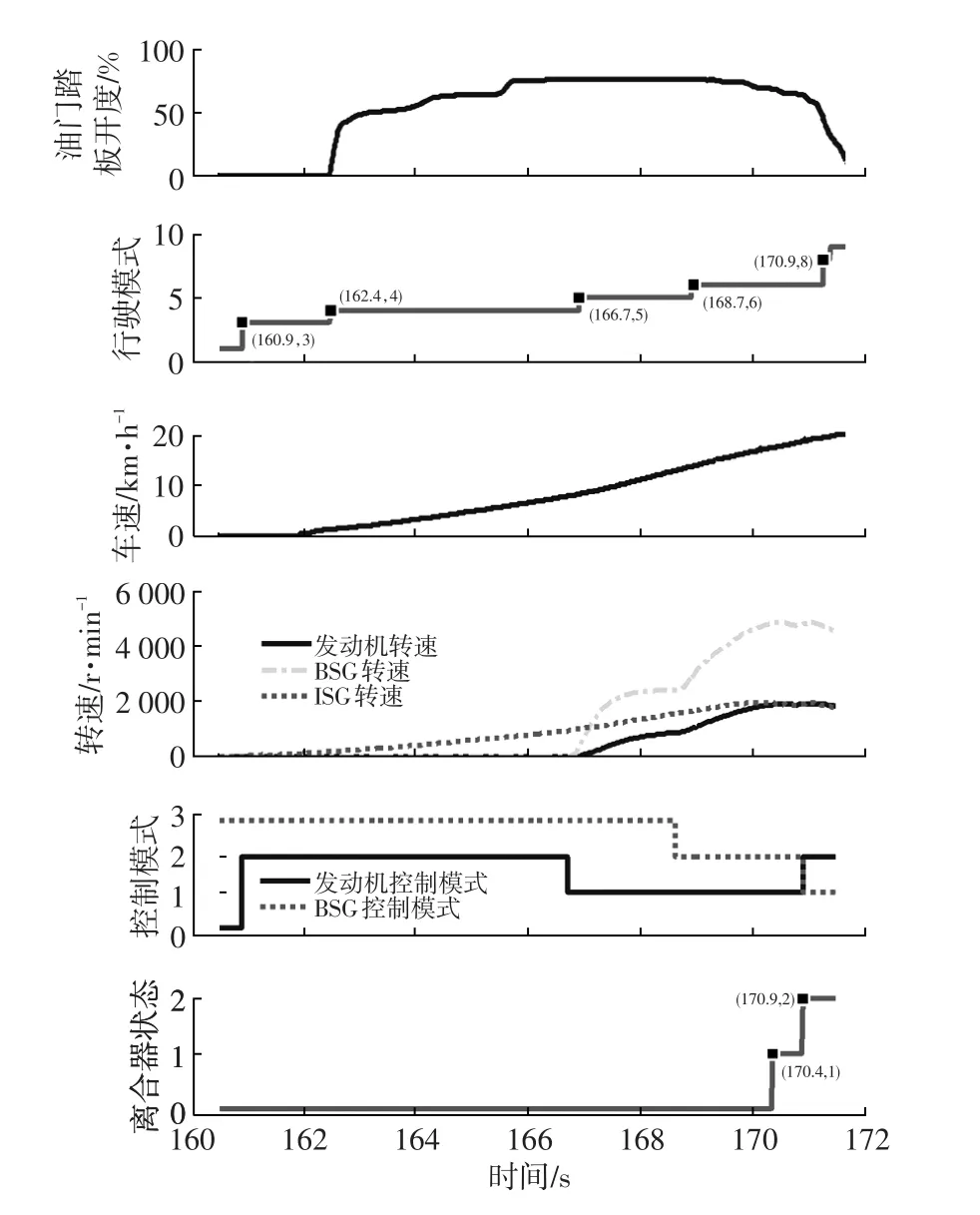
图4 起动调速控制测试结果
由上述测试结果可见,起动调速控制响应分为明显的两个阶段,控制效果良好。基于BSG的快速响应,发动机起动时间较短,且实车测试时起动振动和噪声均较小,有助于改善车辆的动力性。
5.3 稳定发电控制实车测试
当SOC未达到充电阈值上限(85%)开始测试,车辆可在静止状态下进入模式2,起动发动机经BSG为蓄电池充电。驾驶员通过挡位与踏板操作进入驱动的相关行驶模式,则在发动机参与驱动前,算法将控制BSG-发动机系统维持稳定发电状态。如5所示为样车各主要部件状态结果。
由图5可知,虽然车辆行驶模式不断变化,但BSG工作转矩基本维持在负值范围(转矩波动由皮带传动引起),将机械能转化为电能供给车载电器或为电池充电,其间电池电流时有负值充电状态。测试期间电池SOC稍有降低是由于加速行驶期间CVT油泵、ISG等耗电功率较大所致。
由此可见,在停车充电模式下机械能经皮带轮传递,蓄电池充电电流约为3 A。当车辆在多个驱动行驶模式间切换时,由ISG实现驱动功能、BSG-发动机系统可以维持发电状态,有助于改善车辆的SOC维持能力。
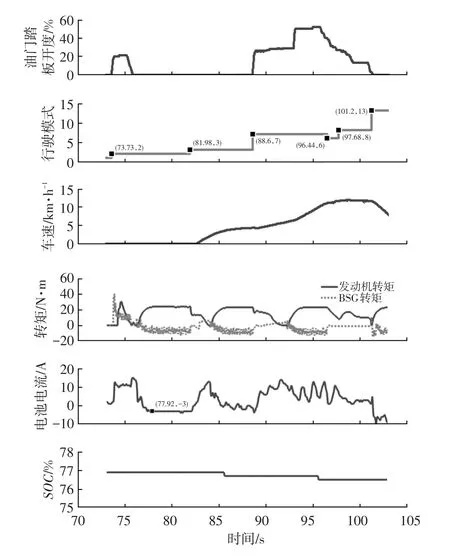
图5 稳定发电控制测试结果
6 结束语
本文基于P2+CVT的并联混合动力汽车,提出增加BSG实现P0+P2的混合动力构型方案,并依据参数匹配原则计算获得了BSG及皮带轮主要参数,依据系统构型特点定义了车辆行驶模式,依据系统功能需求搭建了起动调速控制策略、稳定发电控制策略和整车控制策略,基于试验样车进行了实车测试,结果表明配备BSG的测试样车具备快速起动调速功能,且在行驶模式不断切换的过程中BSG-发动机系统可维持稳定发电状态。
