斜拉索动应变非接触实时测定方法
2019-07-09吴庆雄黄宛昆
王 渠,吴庆雄,黄宛昆
(1.福州大学土木工程学院,福建福州 350108;2.工程结构福建省高校重点实验室,福建福州 350108;3.福建省土木工程多灾害防治重点实验室,福建福州 350108)
0 引言
在实际工程中,常采用振动频率法测量斜拉索的索力,具体做法是通过环境振动激励斜拉索,通过频谱分析拉索响应时程数据得到固有频率,再根据索力与固有频率的计算公式求得索力[1].但是,这种间接测量的方法无法得到实时索力.另外,斜拉索索力测量还可以采用电阻应变片和动态采集仪,通过采集斜拉索的动应变数据,根据索力与应变的线性计算公式得到实时索力.虽然电阻应变片具有尺寸小、操作简单、灵敏度高、测量结果可靠等优势,但是,在斜拉索上粘贴应变片需要破坏拉索的PE保护壳.因此,工程技术人员希望通过非接触式的方法测量斜拉索的应变.数字图像相关技术测量动应变应用而生,它是一种单设备多目标甚至全局测量的测试系统,也是一种便捷可行自动化程度高的测试系统[2-3].
近年来,中国的非接触式应变测量技术取得了长足的进步[4].张英杰[5]采用Visual C++语言自主开发基于视频图像的应变测量系统,通过对图像的预处理和一维灰度矩亚像素算法使测量方法达到较高的精度,并用金属材料的拉伸试验进行了验证.周晓峰[6]通过动静态实验验证数字图像相关技术能够很好地测量物体变形过程中的位移和应变值.张春[7]针对坐标网格分析技术的应用现状,研究基于计算机视觉测量的应变分析可视化系统的结构组成,得到采用欧拉法和有限应变解析的方网格应变计算方法.董伟超[8]开发基于单相机自由拍摄多幅网格图像的钣金件应变测量系统,并通过多个试验验证系统的有效性.在国外,Avitabile等[9]对数字图像相关技术、动态摄影测量和三维激光测振等非接触测量技术进行讨论,并验证数字图像相关和动态摄影测量技术的有效性.Rand等[10]利用数字图像相关技术的测量方法,从相关点的位移量确定聚合物薄膜在双轴受拉下薄膜应变,得到应力-应变曲线.Chevalier等[11]采用数字图像相关技术研究橡胶材料的单轴和双轴拉伸力学性能试验中的非均匀应变场,得到应力-应变关系.
综上所述,非接触式应变测量研究相对较少,且基本局限于小构件在轴向受力情况下的应变测量,涉及到斜拉索动应变的研究极少.在斜拉索非接触式位移测量研究方面,黄宛昆等[12]利用LabVIEW平台和高速相机组建动位移实时测定系统,通过室内模型试验和实桥测试验证该系统的有效性.因此,本文基于单设备多目标高速相机非接触测量动位移测定系统,研究非接触且实时测定斜拉桥拉索动应变的计算方法.首先推导拉索整体割线坐标系下由动位移计算动应变的计算公式并简化得到测定方法.其次进行斜拉索动应变实时测定系统的开发.最后通过室内摆锤模型试验,验证斜拉索动应变简化计算公式的正确性和动应变测定方法的可靠性;通过实桥斜拉索动力测试,验证开发的测定系统的可行性和有效性.
1 斜拉索动应变实时测定方法原理
1.1 斜拉索动应变计算公式
斜拉索的几何形状如图1(a)所示.其中假定斜拉索两端与基座为铰接,倾角为θ的斜索,等断面;坐标系(x*,z*)定义为整体割线坐标系;L为两端点之间的长度,θ为倾角.在荷载作用下,有初始轴力的斜拉索会产生额外张力ΔT,与此同时会产生额外应变Δε.如图1(b)所示,在整体坐标系中截取一段斜拉索微元体,基于斜拉索小应变理论,忽略温度变化对斜拉索伸长量的影响,由虎克定律得:

式中:Δs为斜拉索微元体原始长度;Δs1为斜拉索变形后微元体长度;E为弹性模量;A为横截面面积.

图1 斜拉索计算图示Fig.1 Calculation drawing of stayed-cable
在整体坐标系中如果只考虑斜拉索面内所产生的位移,设A点在x轴和z轴的位移分量分别为:u(x,z)、w(x,z),对其用泰勒公式展开保留线性项,则B'点在x轴和z轴的位移分量为:

由此可以得到Δs和Δs1的表达式:

将式(3)代入式(1),得到应变Δε的表达式为:

转换得到整体割线坐标系下斜拉索动应变计算公式[13]:

式中:w*和u*分别是整体割线坐标系下斜拉索z*轴和x*轴方向的位移.
对于斜拉索而言,由于土木工程中常采用的拉索(悬索桥:1/9~1/12;送电线:1/20;斜拉桥成桥状态:<3/200)均属于垂跨比小于1/8的扁平索[14],因此可近似认为斜拉索[13].1)忽略索的轴向变形,即u*≈0;2)索长方向ds与dx*接近,即ds≈dx*.
同时,由于斜拉索振动具有小应变大位移的特性,因此本文不考虑非线性项的影响.从而得到不考虑非线性项的扁平斜拉索的动应变简化计算公式为:

1.2 有限差分法的动应变计算公式
整体割线坐标系下斜拉索的初始形状为:

将式(7)代入式(6),采用有限差分法进行数值求解.如图2,在整体割线坐标下将斜拉索n等分离散,令t时刻沿z*方向的位移为w*,对任意非边界节点i(1≤i≤n),斜拉索动应变计算公式为:

如图3所示,考虑初始应变的斜拉索动应变计算公式为:

式中:T为斜拉索初始张力;ε0为斜拉索初始应变.

图2 斜拉索差分离散模型Fig.2 Difference method discrete model of stayed-cable

图3 斜拉索初始应变和动应变Fig.3 Initial strain and dynamic strain of stayed-cable
2 斜拉索动应变非接触实时测定系统开发
2.1 程序原理
非接触式斜拉索动应变测定,是利用高速相机拍摄被测物体表面固定的圆形标识点(不少于两个),得到一系列数字图像,经过摄影测量技术获取标识点在实际中的位置信息[12],再通过动应变计算式对位置信息进行处理,最终,通过计算得到应变测量结果.程序获取圆形标识点位置的方法是利用Lab-VIEW提供的圆形边界侦测函数,但是仅采用该函数获取圆形标识点的位置时,容易导致检测目标超出检测范围.因此,本系统为了让圆形边界检测适用于大位移的准确测量,将标识点设为模板进行匹配,先由模板选定时得到模板在图像中的位置,将这个位置进行放大作为模板匹配的搜索区域,最终得到标识点在图像中的位置.技术框图如图4所示.
2.2 系统开发
采用德国产的Baumer高速相机和日本产的Computar HZ5ZZ2518C镜头组成动应变测定硬件系统,具体参数如表1所示.采用GigE接口即千兆以太网接口与电脑连接,利用LabVIEW程序开发平台,进行动应变测定程序的开发.程序主要由标定模块、模板匹配模块、圆形边界检测模块组成.开发的斜拉索动应变测定程序前面板如图5所示,包括数据保存途径、模板搜索区域范围和圆形边界检测等相关参数的设置.在使用本系统时,应注意保持测试相机处于静止的操作平台,并注意测点的光照条件.
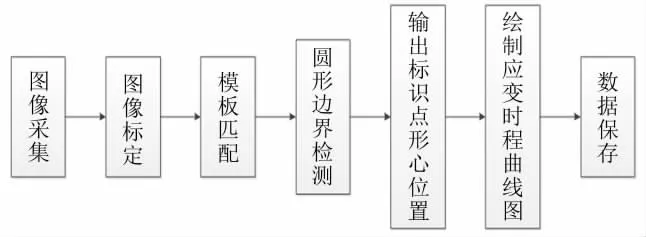
图4 非接触式动应变测定技术框图Fig.4 Technical diagram of non-contact dynamic strain measurement

表1 设备参数Tab.1 Parameters of equipment
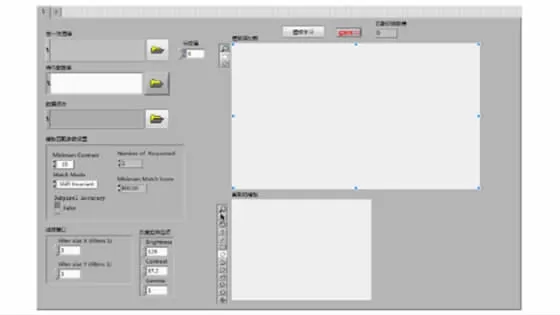
图5 斜拉索非接触式动应变测定程序Fig.5 Program of non-contact dynamic strain measurement
3 室内试验验证
为了对系统开发的可靠性进行技术认证,室内试验使用一个单自由度的摆锤模型,在初始位移的影响下,摆锤模型将发生正弦自由衰减振动,验证圆形边界检测函数模板化匹配的有效性.采用应变片与动应变测定系统对比,验证测量精度.将应变片和动应变测点布置在摆锤模型的近根部位置,如图6所示.动应变测定系统布置了两个圆形标志点,间距约为5 cm,高速相机离测点的距离大约在0.4 m.相机和应变采集仪的采样频率均为50 Hz.
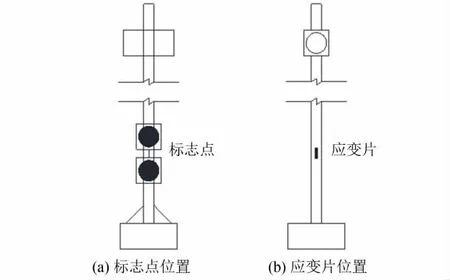
图6 摆锤模型应变测点位置(单位:mm)Fig.6 Strain gauge of pendulum model(unit:mm)

使用有限差分法对式(10)求解可得到由动位移计算钢梁动应变的公式.图7是高速相机和应变片的测量结果.从测量结果可以看出,当相机轴线与摆锤振动平面垂直时,高速相机与应变片的测量结果吻合较好,圆形边界检测函数模板化具有良好的匹配性.因此,室内试验验证斜拉索动应变简化计算公式的正确性和动应变测定方法的可靠性.
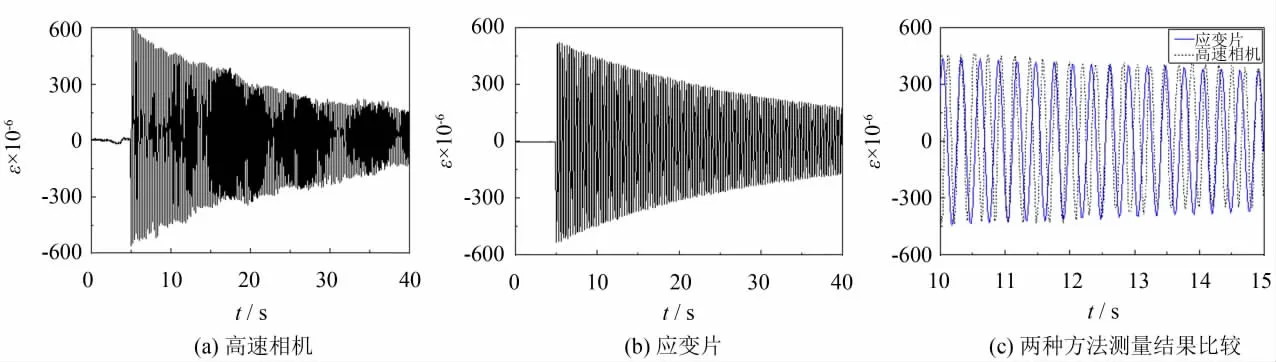
图7 室内试验测量结果Fig.7 Measurement results of indoor experiment
4 实桥应用
为了对系统进行可行性测试认证,采用本测定系统对泉州市晋江大桥斜拉索动应变进行测量.泉州晋江大桥为两跨预应力混凝土斜拉桥,跨径组成为200 m+165 m,全桥设置52对斜拉索,共104根,为双索面扇形布置,斜拉索表面采用PE套管保护.
为不破坏斜拉索表面的PE套管,采用加速度传感器测量斜拉索的索力增量,采用高速相机测量斜拉索动应变,通过比较验证该系统应用于实桥测试的可行性和有效性.具体方案是,连续采集1 h的加速度和动应变,每35 s对加速时程曲线进行频谱分析得到斜拉索一、二阶频率,得到索力变化量的时程曲线,并通过本构关系ε=F/(EA)将索力变化量换算得到应变时程曲线,并与高速相机的动应变测定结果进行比较,验证动应变测定系统的可靠性.
选择主跨下游侧26号斜拉索(编号MD26)作为测试对象,在斜拉索上面布置动应变测点和加速度传感器,图8是实桥测量中使用的动应变和加速度采集设备.实测得到MD26号斜拉索的一阶频率f1=0.61 Hz和二阶频率f2=1.22 Hz.采用Hiroshi提出的索力计算公式[15-16]计算,以第一个35 s作为初始索力,得到初始索力T=5 557 kN,频谱曲线和加速度传感器测得索力变化量转换得到的应变如图9所示.采用动应变测定系统实测得到的应变如图10所示.两者对比如图11所示.可以看出,由高速相机测量得到应变曲线与由加速度传感器测量索力变化量得到的应力曲线趋势大致相同,在幅值上有一定差距,这是由于斜拉索表面有PE保护壳,同时风速较大,高速相机产生了轻微抖动,使得高速相机所测应变难免与真实的斜拉索应变存在一定差距,但是应力曲线趋势的基本一致性,验证该测定方法应用于实桥测试的可行性和有效性.

图8 斜拉索应变标志点和采集系统Fig.8 Strain mark point and acquisition system of stayed-cable
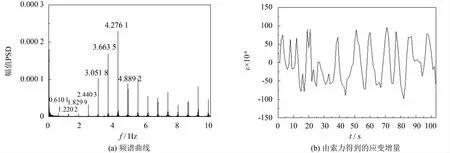
图9 加速度传感器计算结果Fig.9 Calculation result of acceleration sensor

图10 高速相机测得应变增量Fig.10 Strain increment measured by high-speed camera
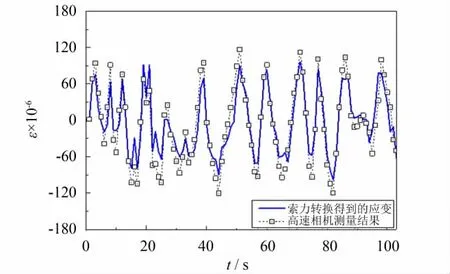
图11 两种方法测得结果比较Fig.11 Comparison of different results
5 结语
1)从斜拉索非线性计算理论出发,推导了拉索整体割线坐标系下由动位移计算动应变的计算公式.由于斜拉索属于垂跨比小于1/8的扁平索且具有小应变大位移的特性,采用扁平索的基本假定,得到不考虑非线性项的拉索动应变简化计算公式,并建立采用有限差分法的斜拉索动应变实时测定方法.
2)采用德国产的Baumer高速相机和日本产的Computar HZ5ZZ2518C镜头组成动应变测定硬件系统.利用LabVIEW程序开发平台,在圆形边界检测结合模板匹配的图像处理技术的基础上,进行斜拉索动应变实时测定系统的开发.
3)在室内摆锤模型试验中,当相机轴线与摆锤振动平面垂直时,高速相机与应变片的测量结果吻合较好,验证了推导得到的斜拉索动应变简化计算公式的正确性和动应变测定方法的可靠性.
4)在实桥斜拉索动力测试中,高速相机测量得到应变曲线与由加速度传感器测量索力变化量得到的应力曲线趋势大致相同,验证了开发的测定系统的可行性和有效性.
