面向海面目标检测的陆海分离和海面分区算法研究
2019-07-06杨予昊南京电子技术研究所南京210039中国电子科技集团公司智能感知技术重点实验室南京210039
周 明 马 亮 王 宁 杨予昊①(南京电子技术研究所 南京 210039)(中国电子科技集团公司智能感知技术重点实验室 南京 210039)
1 引言
岸对海警戒雷达在国土安全防卫,如边境控制、海面搜索、禁毒等发挥重要作用,然而强海杂波背景下的微弱目标检测问题一直是岸对海警戒雷达的一大难题。在海面微弱目标检测中,主要面临两个问题:(1)海岛和陆地会导致成片或离散强杂波点,污染协方差矩阵估计的样本;(2)复杂的海杂波特性制约了检测器的检测性能[1]。因此陆海分离和杂波分布拟合是海面目标检测的研究重点。
雷达陆海分离方法主要可以分为基于先验信息的海陆分离和基于图像特征差异的海陆分离[2]。基于先验信息的海陆分离借助高精度电子地图、海岸线或港口背景图像等实现陆海分离,当先验信息缺失或不易获取时,多采用基于图像特征差异的海陆分离,如借助雷达回波图、合成孔径雷达(SAR)图像或卫星图等实现陆海识别。文献[3]利用支持向量机和基于对象分类法对卫星图像进行了海岸线提取,将结果与人工数字处理结果对比,表明两种方法对海岸线提取具有亚像素精度。文献[4]利用小波变换与主动轮廓法对SAR图像进行海岸线提取。文献[5]提出了一种基于从粗到细的层次结构水平集和窄带水平集的海岸线提取法。文献[6]利用图像平滑、阈值分割和边界跟踪等技术对SAR图像中的海岸线进行了提取,实现陆海分离。文献[7]利用图像的灰度和纹理对SAR图像分割达到提取海岸线的目的,但由于定位精度不高和处理速度较慢,因而实用性不够。
然而岸对海警戒雷达对海探测时通常无SAR图像或卫星图像辅助完成陆海分离,且随着数据量的增大以及分辨率的提高,对陆海分离算法的速度提出了更高的要求,因此需要提出更准确更快速的陆海识别方法。
完成陆地和岛礁样本剔除后,需要对海杂波数据进行分布族辨识及海面目标检测[8,9]。雷达利用相干脉冲进行目标检测时,已有学者基于不同杂波模型分别提出广义似然比检验(Generalized Likelihood Ratio Test, GLRT)检测器[10]、自适应匹配滤波(Adaptive Matched Filter, AMF)检测器[11]和自适应归一化匹配滤波(Adaptive Normalized Matched Filter, ANMF)检测器[12,13],因此杂波数学模型是自适应检测器推导的基础,杂波分布模型的匹配度对检测性能影响很大。
针对上述问题,本文提出一种面向海面目标检测的陆海分离和海面分区算法。首先根据陆地回波序列间的相位具有强相关性,而海洋回波序列间的相位为随机值这一特性,区分陆地杂波和海杂波;其次,考虑到雷达擦地角是影响海杂波模型的重要因素,本文提出了一种基于擦地角的海面分区算法,并根据分区结果,采用均方误差检验法拟合出最优分布,进而选择合适的检测器进行自适应检测;最后,通过对某S波段雷达实测数据进行分析,验证本文所提出算法在海杂波下目标检测的性能。
2 问题描述
海面目标检测中,由于海杂波和目标通常可能处于相同多普勒通道,导致目标信杂比严重下降,给雷达目标检测带来很大难度。因此自适应检测器(如图1所示)逐渐成为海杂波下目标检测的重要途径,自适应检测器通过估计参考样本的频谱特性,对待检测单元进行杂波白化和目标积累来提高目标的信杂比,以改善检测性能。
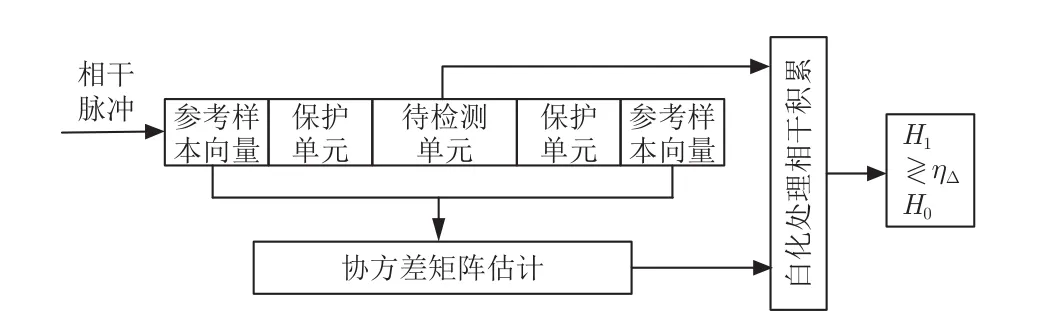
图1 自适应检测器检测流程Fig.1 Adaptive detection process
自适应检测器高度依赖于杂波向量的协方差矩阵。通常杂波的协方差矩阵是通过待检单元周围的距离单元作为训练样本估计得到的,并假设所选用的参考单元为纯杂波单元,且满足独立同分布特征[14]。但实际对海目标检测中,海岛和陆地会引入成片或离散强杂波点,污染协方差矩阵估计的样本,降低目标检测性能,同时导致虚警率增加。此外,海杂波模型对于自适应检测器的检测器模型、检测门限和检测器性能优化具有重要作用,在常规的自适应检测方法中,假设整片海面服从单一海杂波模型,可能出现所假设的杂波模型偏离真实杂波模型的问题,从而造成检测性能下降。为改善上述问题,本文提出面向海面目标检测的陆海分离和海面分区算法,算法流程图如图2所示。
3 面向海面目标检测的陆海分离和海面分区算法
3.1 基于回波相位相关度的陆海分离算法
基于雷达回波的陆海识别算法主要是利用多普勒频率、回波幅度、相位等信息区分海面和陆地。由于陆地回波的多普勒频率主要位于零多普勒通道,而海杂波的多普勒频率覆盖较宽的范围,因此通常利用多普勒特性区分陆地和海洋。但基于多普勒特性的陆海识别方法占用较多系统资源,为降低算法的计算复杂度,本文提出基于回波相位相关度的陆海识别算法。
假设雷达工作于机扫模式,在每个波位上发射脉冲数为K,基于回波相位相关度的陆海识别算法分为以下几个步骤,首先提取出连续两圈回波相同波位的相邻脉冲的相位差,然后计算两组相位差值的相关度,最后通过阈值处理算法得到陆海分割后的图像。
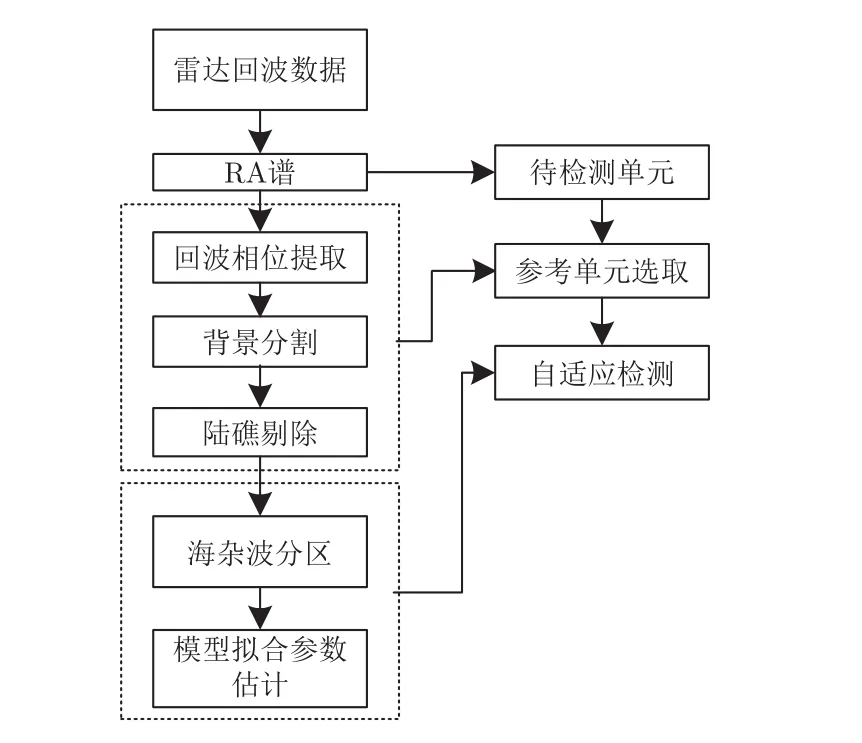
图2 本文算法流程图Fig.2 Flow chart of this paper algorithm
3.1.1 回波序列相位提取
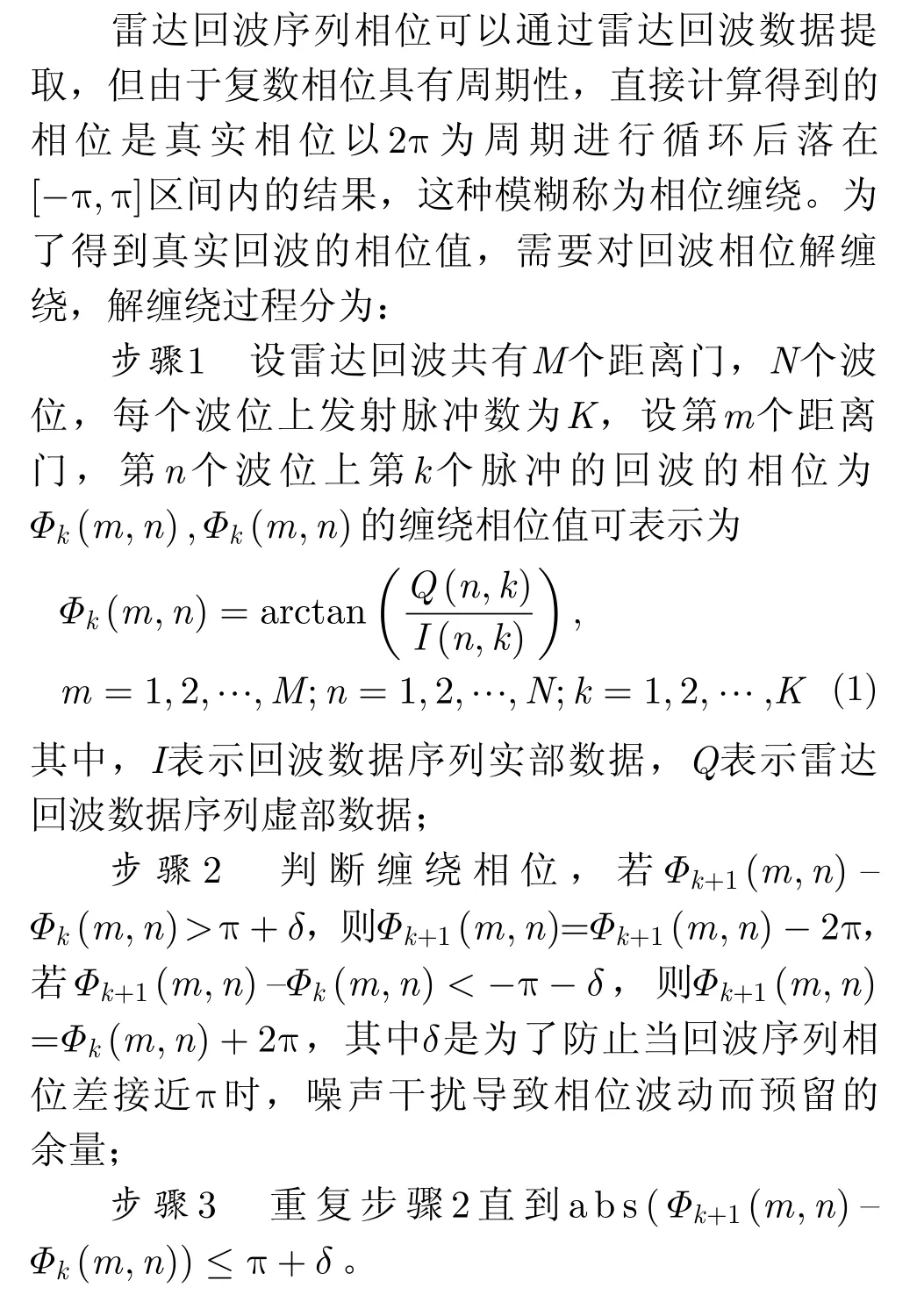
3.1.2 回波相位相关度计算
回波相位相关度是通过计算连续两圈回波数据中同一波位上相邻脉冲的相位差的相关度得到。对于陆地回波,连续两圈数据之间的相位相关度很高,而对于海洋杂波,由于海面是时变的,因此连续两圈数据的相位之间的相关度很低,利用这一特性可以区分陆地区域和海洋区域。相邻脉冲回波相位差k(m,n)定义为
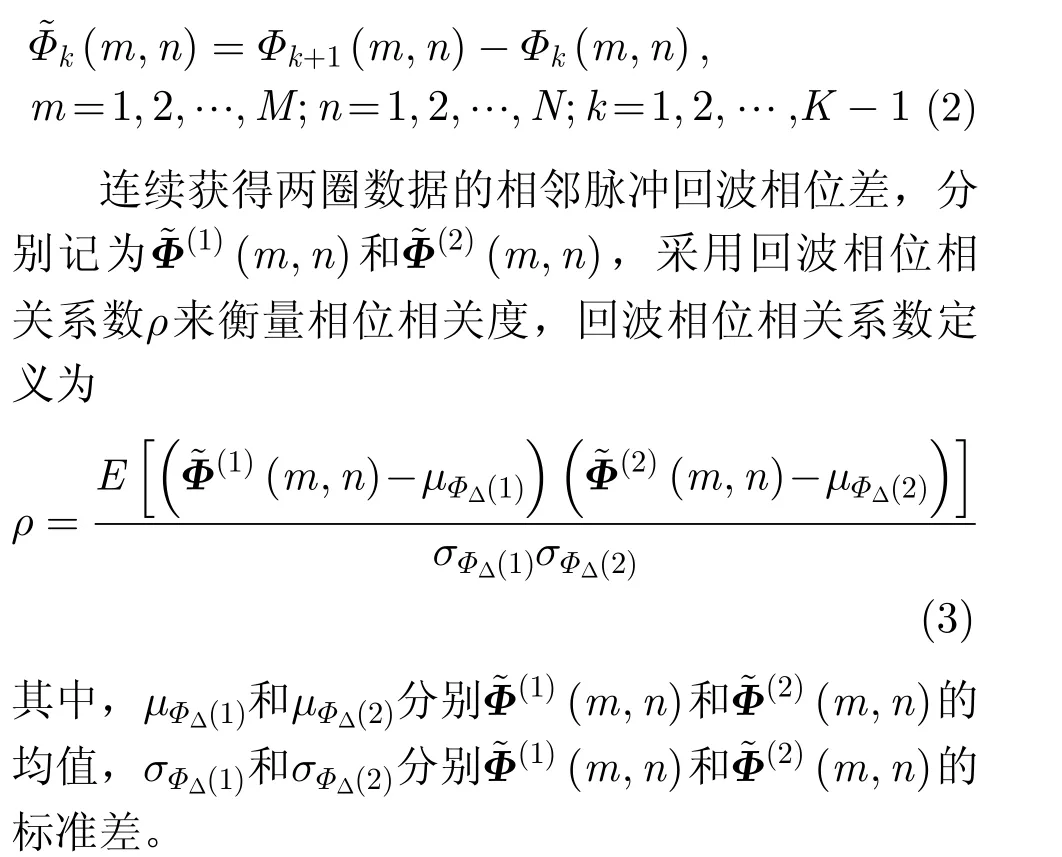
3.1.3 阈值处理
计算所有分辨单元中的相位相关系数,量化到[0, 255]后得到一幅灰度图像,称为相位线性度图像。对相位线性度图像的背景分割可采用最大类间方差法(又叫做大津法)。大津法[15]是图像学中一种自适应确定分割阈值的方法,将图像按灰度级分为目标像元和背景像元,按照大津法原理自动求得的阈值对图像进行二值化分割后,使得目标像元与背景像元的类间方差最大。本文将大津法推广运用于陆海分离算法中,自动判定分割阈值,将相位线性度图像进行二值化分割为陆地区域和海洋区域。大津法的基本过程如下:
假设相位线性度图像灰度范围为[0,L],图像的大小为M×N,陆地区域和海洋区域的分割阈值记作T,属于陆地区域的像素点数占整幅图像的比例记为w0,其平均灰度;属于海洋区域占整幅图像的比例为w1,其平均灰度为。图像的总平均灰度记为,类间方差定义为

为避免出现边界处模糊,分类不准确的现象,同时考虑两类别内各像元的内聚性。定义类内方差为

将回波相位相关系数映射到[0, 255]后,应用大津法计算得到分割阈值T,回波相位相关系数大于阈值处为海洋区域,反之为陆地区域。
3.1.4 算法可靠性分析
相位相关性区分陆海区域利用陆地回波序列间的相位具有强相关性,而海洋回波序列间的相位为随机值这一特性,区分陆地杂波和海杂波。对于零多普勒的陆地区域,假设发送的线性调频信号为
3.2 基于海面分区的自适应检测技术
自适应检测器中杂波分布模型的准确性对检测性能影响很大。雷达检测和信号处理中,常见的分布包括Rayleigh, Lognormal, Weibull和K分布等[8]。Rayleigh分布是最早应用的海杂波模型之一,其主要适用于中等或较高擦地角条件下低分辨率雷达海杂波的幅度分布建模,Lognormal分布适用于杂波变化较为剧烈,擦地角较小的场景,Weibull分布可以比较好的描述低海情、小擦地角杂波,K分布通常用于高分辨雷达的高海情、小擦地角的杂波建模中。图3为某S波段雷达一圈数据作为拟合的数据输入时,Rayleigh, Lognormal, Weibull和K分布的拟合结果。
采用均方误差检验法衡量每个模型的拟合精度。均方误差是实测概率密度与拟合的各分布模型概率密度的差平方的平均值
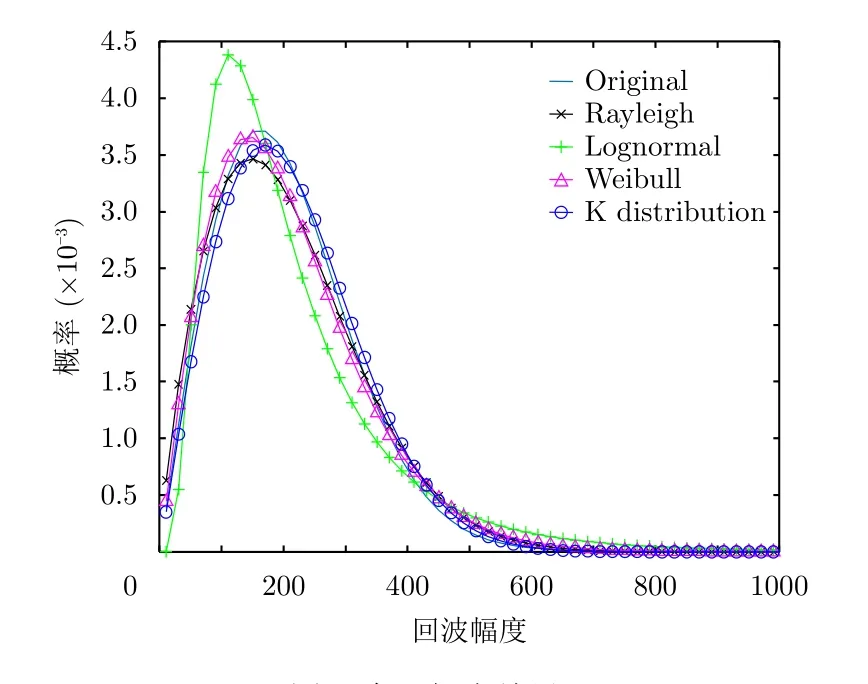
图3 全局拟合结果Fig.3 Fitting result of radar data
从图3可以看出,K分布具有更好的拟合性能,但将海杂波区域按距离相平均分为20份后重新拟合,拟合后的结果如表1所示。

表1 分块后拟合结果Tab.1 Fitting result of uniformly partitioned data
从统计结果来看,由于海面真实状况复杂,针对海面数据拟合时采用单一模型难以达到较好的拟合准确度,考虑到雷达擦地角是影响海杂波模型的重要因素,因此本文提出一种基于擦地角的海面分区算法,将海面划分为多个区域后拟合,从而提高杂波模型的匹配度。
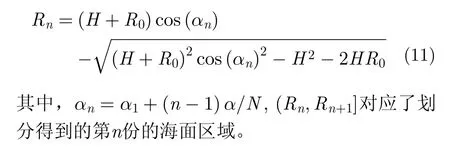
假设雷达部署在高度为H的山顶,第1个距离门距离雷达直线距离为R1,最后1个距离门距离雷达直线距离为R2,地球半径为R0,第1个距离门和最后一个距离门的擦地角差为,具体位置如图4所示。
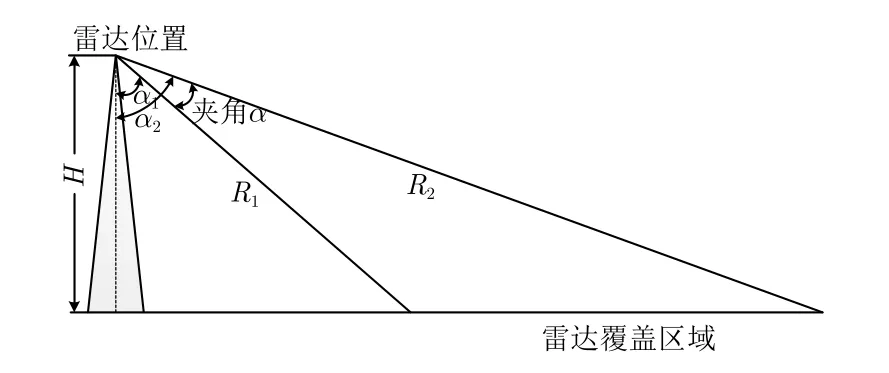
图4 雷达位置示意图Fig.4 Radar position diagram
4 仿真分析
本文所采用的数据来自某S波段雷达,该雷达架设在海边海拔183 m的山上,采集对应的实际起始距离R1为1.8 km,每个距离门长度37.5 m,雷达工作在机扫模式,每个波位发射脉冲数为8个。
图5给出了基于回波相位相关度的陆海分离结果。图5(a)给出了该雷达连续扫描两圈的相同距离门和波位上的回波间的相位相关系数值的2维图,将量化到[0, 255]后,应用大津法将其分割得到图5(b)的二值图像,其中白色区域为陆地区域,黑色区域为海杂波区域。在自适应检测的样本选择中,将避免选择白色区域中的样本参与检测,从而提高协方差矩阵估计的准确性。
得到纯海杂波区域后,将海杂波区分割为若干区域后精细化检测。图6给出了本文所提出的基于擦地角的分割结果,从分割结果可以看出,距离雷达较近处分割较细,距离雷达较远处分割较粗,由于近海处海杂波受海礁、船舶等影响较大,因而分割较细有利于得到更准确的杂波模型。
根据图6分割后的结果,对分割后的每个区域拟合,采用均方误差检验法得到10个分块的最优拟合结果,具体拟合结果如表2所示。从表2可以看出,10个分块均服从复合高斯分布,其中6块服从Weibull分布,4块服从K分布,这表明复合高斯分布模型具有较好的杂波拟合度。
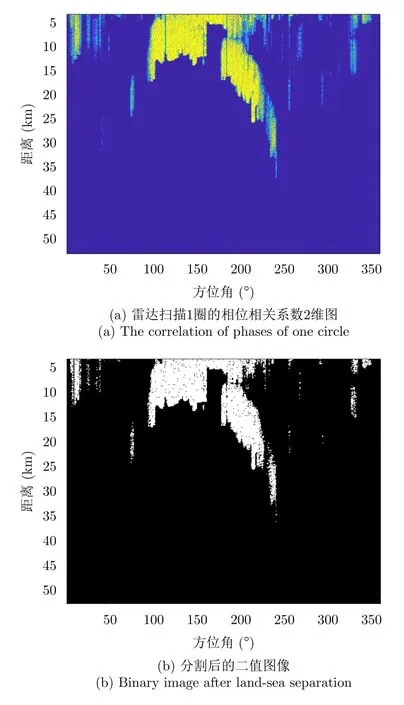
图5 基于回波相位线性度的陆海分离结果Fig.5 Land-sea separation result based on the correlation of phases
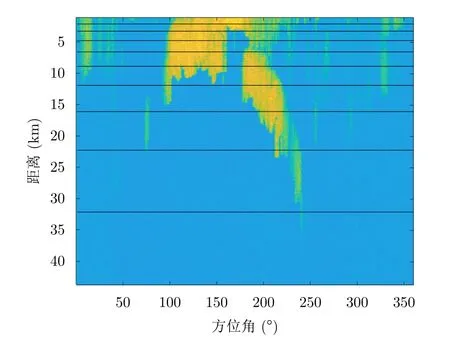
图6 基于擦地角的海面分区结果Fig.6 Sea surface zoning result according to the rubbing angle
最后通过蒙特卡洛仿真给出了所提出算法的海面目标检测性能。在待检测的分辨单元中加入给定信杂比和给定多普勒频率的仿真目标信号,s(n)=aej(2nfd/fr+φ),其中fd为多普勒频率,位于区间[–fr/2,fr/2],fr为脉冲重复频率,初相是区间[-,]上均匀分布的随机变量,幅度参数Pclutter为仿真目标信号所加杂波单元N个脉冲的平均功率,SCR为信杂比。仿真中假设目标多普勒频率fd=200 Hz,给定的目标虚警率Pf=10–4,此时目标的多普勒频率接近海杂波谱的偏移量,即待检测目标位于强杂波区。图7(a)给出了位于岛礁附近目标的检测性能,仿真中在岛礁附近随机加入仿真目标,分别仿真了直接自适应检测和剔除岛礁样本后自适应检测的性能。图7(b)给出了海面上随机加入仿真目标时检测性能对比,根据海面分区结果,在每个分区中随机加入1个仿真目标,分别对比了直接自适应检测和剔除岛礁样本后根据目标所在区域的杂波分布选择合适自适应检测器时的检测性能。从图7可以看出,两种仿真场景下,随着信杂比提升,目标的检测概率逐步提升,采用本文提出的目标检测算法,相对于传统检测算法性能提升比较明显。
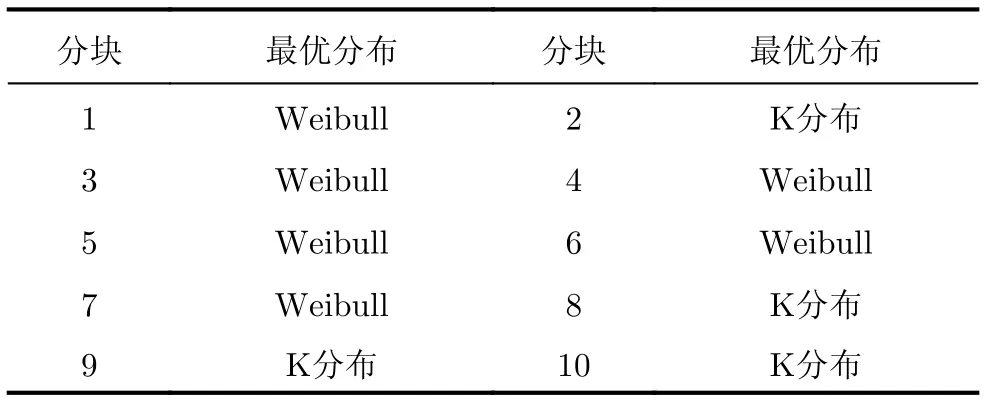
表2 杂波分区后的拟合结果Tab.2 Fitting results of partitioned data according to the rubbing angle
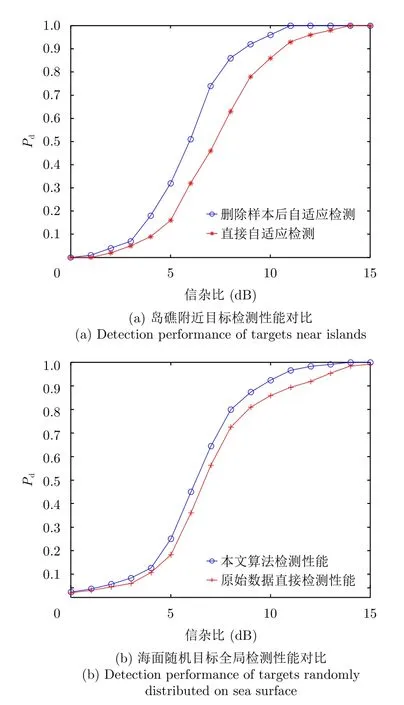
图7 海面目标检测性能Fig.7 Detection performance of targets on sea surface
5 结论
本文提出了一种面向海面目标检测的陆海分离和海面分区算法。通过基于回波相位相关度的陆海分离算法和基于擦地角的海面分区算法,有效解决了自适应检测中海岛和陆地导致的成片或离散强杂波点污染协方差矩阵估计的样本和自适应检测中杂波模型匹配度不够的问题。实测数据的分析与检测结果表明,通过所提出的陆海分离算法和海面分区算法,目标检测性能相对于传统检测算法性能提升比较明显,从而验证了本文的算法的有效性。
