雷达海杂波测量试验回顾与展望
2019-07-06刘宁波董云龙陈小龙
丁 昊 刘宁波 董云龙 陈小龙 关 键
(海军航空大学 烟台 264001)
1 引言
当雷达以对海模式探测海上舰船、掠海飞行器或巡航导弹等军用目标,以及浮冰、航道浮标、小渔船或快艇等民用目标时,均会不可避免地受到复杂海面回波即海杂波的影响。如何有效抑制海杂波,最大限度地积累目标回波能量,从而削弱海杂波不利影响,改善海上目标探测性能,是一个探索性强且难度很大的瓶颈理论技术问题,也是雷达应用领域仍需进一步解决的重难点问题[1—3]。
削弱海杂波不利影响的基本前提是开展海杂波特性研究、充分掌握海杂波特性规律并合理有效利用海杂波特性;在此基础上,建立合理的海杂波模型并研究与之匹配的杂波抑制和目标检测方法则是进一步改进和创新海上目标探测技术的有效途径[4]。海杂波特性研究是一个共性技术问题,是当前各国海上目标探测技术的研究热点,同时也是一个基础性问题,在特征描述上具有很大的难度,主要表现在以下3个方面[5]:(1)海杂波影响因素众多,从大的方面看,包括雷达参数、海域、水文/气象参数等,每种因素还可进一步细化,而海杂波正是这些复杂多变参数的非线性函数;(2)海杂波模型通常偏离高斯分布,呈现出非高斯、非线性和非平稳特性(即“三非”特性),其中,非高斯主要与分辨率的不断提高有关,非线性主要与海表面的动态模型密切相关,非平稳性主要由海表面状态的时变特性引起;(3)在高分辨率、高海况和小擦地角等条件下,海杂波中出现海尖峰的概率明显提高,它在时域表现出类似于目标回波的特性,在频域也具有更大的多普勒谱展宽,很容易引起虚警。
开展海杂波特性认知研究的技术途径主要有两种[6],一种是基于电磁散射理论和海表面模型开展物理机理方面的研究,另一种是通过开展试验,获取海面回波测量数据(含海杂波与目标),并利用实测数据开展研究。其中,后者是一种贴近实际且被广泛采用的研究方法,其可验证海杂波散射机理研究成果,弥补机理研究的不足,同时可真实反映出不同因素影响下的海杂波特性变化规律以及海杂波与目标之间的复杂耦合关系,进而支撑多域多维特征提取和差异特征空间形成等方面的研究工作,直接服务于海杂波抑制和特征域的目标检测方法。试验测量数据除海杂波和目标回波外,还应采用波浪浮标、风速仪、GPS, AIS等多种辅助传感器同步记录海洋环境信息、目标信息等辅助参数和数据,其中,海洋环境信息重点包括风速/风向、浪高/浪向、温度/湿度等,目标信息重点包括距离、经/纬度、运动速度/方向等。这些信息应规范化记录并与回波数据同步入库,若辅助数据记录不完整、不规范,测量回波数据的应用价值将大打折扣。
在过去的数十年里,国内外相关研究机构在雷达海杂波测量试验方面做了大量工作,所开展的试验涉及多种类型、多种参数,包括平台、波段、分辨率、极化、擦地角、海域等,其中,平台包括岸基、舰载、机载、弹载、星载等多种类型,波段覆盖了P, L, S, C, X, Ku和Ka等,擦地角最低时小于1°,最高可达80°,涵盖了小擦地角和大擦地角,海况也覆盖了典型的低、中、高海况。这些试验数据是开展海上目标探测理论研究和工程应用研究的重要基础和支撑。
本文首先以岸基试验和机载试验为主线对国外10余家研究单位开展的典型试验情况进行了梳理和总结,紧接着回顾了基于造浪池开展的海杂波测量试验,并简要介绍了国内开展的海杂波测量试验和烟台的海上目标探测试验中心建设情况,最后,展望了后续雷达海杂波测量试验方面仍需进一步关注的几个方向。本文综述的目的之一是为同类型试验的开展提供一些参考和借鉴,目的之二是在试验条件尚不具备、试验数据暂时无法获取的情况下,通过参考近似条件下的试验情况及得到的主要分析结论或大致的参数范围,支撑相关研究内容的初步论证工作。
2 岸基雷达海杂波测量试验
从公开文献来看,国外较为典型的岸基雷达海杂波测量试验有加拿大McMaster大学的IPIX雷达海杂波测量试验[7]、南非科学和工业研究理事会(Council for Scientific and Industrial Research,CSIR)的海杂波测量试验[8]、澳大利亚国防科技署(Defence Science and Technology Organization,DSTO)的多波段(L, S和X波段)雷达海杂波测量试验[9—11]、美国海军研究实验室(Naval Research Laboratory, NRL)的X波段雷达海杂波测量试验[12]、西班牙南海岸Ka波段高分辨率雷达海杂波测量试验[13]等。除此之外,还包括美国海军空战中心的多波段(UHF, L, S, C, X和Ku波段)雷达小擦地角海杂波测量试验[14,15]、英格兰南海岸多波段(S, X和Ku波段)雷达海杂波测量试验[16]、日本的X波段雷达海杂波测量试验[17]、德国和法国联合开展的MARLENE(Mediterranean RFC and Sea Clutter Environmental Experiment)多波段(C, X, Ku,Ka和W波段)雷达海杂波测量试验[18]、伦敦大学(University College London, UCL)的S波段NetRAD单/双基地雷达海杂波测量试验[19—23]等。该部分主要对几次典型的单、双基地试验情况进行梳理和汇总。
2.1 IPIX雷达海杂波测量试验
该试验在雷达海上目标探测技术方向广为熟知,且试验数据得到了广泛应用。它由加拿大Mc-Master大学组织实施,测量的数据集由Haykin教授带领的团队负责管理和维护,是典型的岸基平台小擦地角海杂波数据(擦地角均小于1°)。
IPIX数据有两大集合[7,24],一是1993年在加拿大新斯科舍省南部城市Dartmouth的测量数据。试验时雷达从峭壁上俯视大西洋,雷达天线及观测海域如图1所示,纬度/经度为44°36.72′N/63°25.41′W,架设高度距平均海平面约30 m,试验时采用的雷达参数如表1所示。在驻留模式下,数据采样时长约为130 s。本次试验公开了14组驻留模式数据,其中4组数据受到截断效应的严重影响(编号分别为18#, 19#, 25#和283#),因此可用数据共10组,每组包含14个距离单元。此外,另两组数据分别名为“hi.dat”和“lo.dat”,它们为单个距离单元的数据,分别为典型的高海况和低海况海杂波。

图1 IPIX雷达天线及观测海域Fig.1 IPIX radar antenna and observed area

表1 IPIX雷达参数Tab.1 IPIX radar parameters
合作目标是直径1 m的航天用密封球形救生器,目标表面包裹一层铝箔,以有效增强其雷达回波信号。随海浪的运动,该目标在左右漂移的同时上下起伏运动,因此其能量在距离上和多普勒谱上均有所扩展,在主目标单元,平均信杂比(Signal to Clutter Ratio, SCR)约0~6 dB。在试验的不同时间,目标球放在了不同的位置,分别标识为TargA, TargB和TargC,对应的距离/方位分别为2660 m/128°, 5525 m/130°和2655 m/170°。
IPIX的另一数据集是1998年在加拿大安大略湖畔Grimsby的测量数据,试验时雷达从岸上俯视安大略湖,纬度/经度为43°12′41.0′N/79°35′54.6′W,平台高度为20 m。与1993年试验相比,IPIX雷达的主要升级体现在量化位数上(从8位升级为10位),以有效降低量化误差。同时,增加了同一时间段、不同距离分辨率(3~60 m)条件下的海杂波测量试验,以便于研究分辨率对海杂波特性的影响。试验采用的合作目标是漂浮小船,目标位置、海浪参数等辅助信息并未在网上公布。
IPIX数据存储格式为网络通用数据格式(Net Common Data Format, NetCDF),在载入原始数据时,共有3种可选的预处理类型,分别是Raw模式、Auto模式和Dartmouth模式。其中,Auto模式执行的预处理包含两个步骤,一是去掉I/Q通道的均值和标准差,二是去掉相位失衡,预处理后每个距离单元的数据均具有相同的功率水平。在海杂波特性分析与建模、海杂波抑制及目标检测等领域,IPIX数据得到了广泛应用。在图2中,给出了目标单元上典型的时频域分析结果,其中,图2(a)为短时傅里叶变换(Short-Time Fourier Transform, STFT),图2(b)为平滑伪WVD(Smoothed Pseudo WVD, SPWVD)。可以看出,海杂波短时谱较宽,其能量主要集中在低频段范围,而目标的谱线较窄,其能量集中在零频附近,在时频2维平面上表现为一条蛇形曲线。此外,海杂波短时谱表现出较为显著的时变非平稳性,谱宽、中心频率及谱的功率水平等特征均随时间起伏变化。
IPIX数据也存在一些局限性,一是数据集仅覆盖了几组有限的环境条件、相对几何位置和雷达参数,且相关的重要辅助信息记录不够全面,尤其是1998年数据。另一个限制是没有测量机动船只等类型目标的回波数据,这也是研究人员在应用IPIX数据时通常需要叠加仿真目标回波的原因之一。
2.2 CSIR海杂波测量试验
为协助南非军方遏制走私、偷猎、海盗、非法移民和恐怖主义,自2003年以来,CSIR先后启动了若干项目,以发展一个持续的、无处不在的监视系统。其中,小船目标检测项目即为其中之一,其目的是通过开展海上探测试验获取实测数据,用于支撑该监视系统关键要素和所需功能的研发[8]。作为该项目的重要组成部分,在2006年和2007年,CSIR分别在南非西南海岸线利用试验雷达开展了两批次、累计持续时间达19天的海杂波与目标船回波数据测量试验[25,26]。

图2 目标单元的时频域分析结果Fig.2 Time frequency domain analysis results of target bin
2006年试验采用的试验雷达为Fynmeet雷达,它是一个便携式微波测量设备,性能参数在表2中给出。雷达架设在Overberg Test Range (OTB)的3号测量站,经/纬度为20°117.46E/34°3656.52S,架设高度距离平均海平面约67 m。局部风速和风向由两个间距为1 km的气象站分别记录,而波浪参数由定向波浪浮标记录。为了得到真实的RCS测量值,在试验时采用直升机下方吊装标准反射球的形式获取校准系数,并对试验系统进行校准,使测量值的标准偏差保持在1 dB左右。
2007年试验时,采用X波段单脉冲体制试验雷达,工作频率为8.8 GHz, PRF可调,雷达架设在Cape镇的信号山(Signal Hill)测量站,经/纬度为18°23′53.76′E/33°55′15.62′S。局部风速和风向分别在雷达位置、Robben岛、开普敦港和Slangkop4处场地测量,局部海浪信息由放置于海底的波浪传感器和定向波浪浮标测量,同时在Table湾 和Robben岛周边的8处场地进行了数值模拟。试验系统的校准方法与2006年相同。

表2 Fynmeet雷达系统性能参数Tab.2 Fynmeet system and performance specifications
两次试验期间,雷达架设场地周边环境分别如图3和图4所示,场地的地理位置信息和海洋环境参数在表3中进行了汇总。显然,两次试验均属于小擦地角条件下的测量试验。

图3 2006年试验架设位置(OTB)Fig.3 Location of the deployment site in 2006 (OTB)

图4 2007年试验架设位置(信号山)Fig.4 Location of the deployment site in 2007 (Signal Hill)
测量数据涵盖了多种参数组合,包括不同发射波形、方位角和距离范围等,每当环境条件发生显著变化时,就会重复这一组测量,完成一次测量的最短时间约为2 h。试验期间,采用了多种类型的合作目标船只,部分船只图片如图5所示,其中,从左到右依次为5.7 m长的乘浪者号充气橡皮艇(Waverider Rigid Inflatable Boat, RIB)、机动快艇和蒂莫西渔船。合作目标试验累计开展9天,覆盖低海况和高海况,船只的航行轨迹覆盖了不同的距离范围和方位角,并由GPS进行同步数据记录。

表3 地理位置和环境参数汇总Tab.3 Summary of geometry and environment conditions

图5 合作目标船Fig.5 Cooperative target ships
CSIR试验共测量了大量海杂波与目标回波数据,以及雷达工作参数、海洋环境参数、GPS数据等辅助数据。CSIR数据集在数据量、数据覆盖的参数集合和合作目标类型等多方面均可弥补IPIX数据的局限性,同时,CSIR详细的试验方案设计和试验参数记录也可为同类型试验的开展提供很好的参考和借鉴。目前,包括CSIR团队在内,国内外已有很多研究机构利用该数据支撑了相关理论研究工作。例如,比萨大学的M. Greco等人利用该数据研究了非高斯、非平稳海杂波对协方差矩阵估计和自适应CFAR检测器性能的影响[24](非高斯分布模型的典型拟合结果如图6所示,数据文件为TFC15_001,可以看出,非高斯模型中K分布和GK分布拟合结果相对更好);西电陈帅、水鹏朗利用该数据[27],证实了所提出的过采样MTD检测方法在检测性能上的优势;海军航空大学陈小龙、关键等人利用该数据分析了海杂波和目标信号的稀疏特性,并验证了基于短时稀疏时频分布的目标检测方法的有效性[28]。

图6 典型幅度分布拟合结果Fig.6 Typical amplitude distribution fitting results
2.3 DSTO岸基海杂波测量试验
DSTO在1998年—2013年期间,先后公开发布了15份海杂波方面的技术报告,其中共涉及5次、3个波段(L, S和X波段)的岸基和机载海杂波测量试验,这些试验及相关研究成果有效支撑了武器装备的发展或升级计划。在文献[6]中,已经从海杂波特性分析与建模层面对DSTO报告的研究内容进行了简要梳理汇总,包括均值散射系数、幅度分布特性、时/空相关性、多普勒谱特性等多个方面。本文进一步从测量试验的角度对DSTO的主要工作进行梳理,其中,本部分主要关注3次岸基试验,机载试验情况在下一部分给出。
2.3.1 X波段Ingara雷达海杂波测量试验
Ingara雷达是由DSTO研制的HH极化、相参体制多功能雷达,其主要功能是作为一个技术演示平台,调查和演示以SAR为主导的监视系统在应用时所面临的挑战,应用场所是北澳大利亚海岸线上人口稀少的地区[9]。
Ingara雷达海杂波测量试验在1993年11月开展,试验地点在南澳大利亚Noarlunga港南部,雷达工作频率为9.375 GHz。雷达架设在海面上方约30 m的悬崖顶上,大多数数据文件的测量时间保持在30 s量级,相邻测量数据对应的方位角存在15°跳变,方位角覆盖范围为210°~345°。采样率为50 MHz,量化位数为4位。试验时还记录了风速/风向、气温、海水温度、相对湿度等辅助数据,而海浪参数(如浪高/浪向、涌浪周期等)未见记录。
2.3.2 S波段雷达海杂波测量试验
为支撑澳洲反舰导弹防御系统的升级项目,2006年11月,DSTO在距离Adelaide西南方约110 km的袋鼠岛(Kangaroo Island)海域开展了S波段雷达海杂波测量试验,试验代号为KI2006[10]。
试验雷达由DSTO设计和生产,主要采用商业化模块组装而成,并安装在货车上,雷达天线和各分系统如图7所示。该雷达为全相参体制,脉宽、PRF、带宽等参数均可调。在表4中,给出了试验雷达的主要性能参数。
测量试验共持续4天,在多种条件下,采集了超过100组有效数据。在试验时,尽可能满足以下3种条件:①海况尽可能高;②方位角尽可能多;③风向和风强度变化范围尽可能多。试验期间共选择了4处不同的场地(在图8中,用红色方块标注了其中的3处),目的在于提供偏离正北方向约100°~200°范围的方位角。试验场地海拔高度介于50~90 m之间,其经/纬度、海拔高度、与波浪浮标的距离等信息都做了完整记录。

图7 S波段雷达天线及分系统Fig.7 S-band radar antenna and sub-systems

表4 S波段雷达主要性能参数Tab.4 Specifications of the S-band radar system

图8 袋鼠岛的3处试验场地Fig.8 Locations of three sites on the Kangaroo Island
在每个试验场地开展试验时,均采用了一系列类似的配置参数,包括方位角(以5°或10°递增)、极化(发射水平或垂直极化脉冲、接收两种极化数据)等。90%以上的发射脉冲都采用了20 μs的脉宽、340 μs的PRF,以及5 MHz或10 MHz带宽的线性调频信号。接收机大多采用最大增益,导致采集数据在6 ~8 km距离范围内经常出现饱和现象。采集时间范围在1~120 s之间,受存储空间的限制,大部分为15 s或30 s。除雷达参数外,试验场地的气象参数和波浪浮标参数也同步记录,其中,风速通常介于5 ~10 m/s之间,浪高最高为3.5 m,对应的海况约为3~4级。
2.3.3 L波段XPAR雷达海杂波测量试验
XPAR是由澳大利亚电子战微波雷达分部和DSTO雷达分部联合研制的L波段、16通道、VV极化纯接收雷达阵列,以支持反舰导弹防御计划(代号为SEA1448)。
2008年5月12日—2008年5月17日,在发射机协同配合下开展了首次海杂波测量试验,试验地点仍然在袋鼠岛附近海域。在表5中,给出了XPAR和发射机的主要性能参数,在图9中,给出了XPAR雷达外场试验场景的图片[11]。为保证测量数据的有效性,在每次试验时都对接收阵列进行了校准。
试验期间,记录了试验海域的天气和海面信息。气象参数由DSTO的便携式气象站提供,它放置在雷达附近,同时,也应用了Bureau Of Meteorology(BOM)气象站(距离试验场地约35 km)提供的记录数据。海浪参数由部署在测试海域的定向浮标进行记录。在表6中,分别给出了两组典型数据对应的气象和波浪参数。

表5 XPAR和发射机的主要性能参数Tab.5 Specifications of the XPAR and transmitter

图9 L波段雷达系统(多通道)Fig.9 L-band radar system (Multi-channel)

表6 记录的气象和波浪参数Tab.6 Recorded weather and wave parameters
2.4 NRL海杂波测量试验
1994年8月—1994年12月,NRL联合海军空战中心(Naval Air Warfare Center, NAWC)的中国湖基地(China Lake, CL)、约翰霍普金斯大学应用物理实验室(JHU/APL)和TI仪器,在夏威夷考艾岛开展了多次海杂波测量试验,该试验是先进雷达潜望镜探测与识别(Advanced Radar Periscope Detection and Discrimination, ARPDD)项目的重要组成部分,试验时重点关注高PRF和小擦地角条件[12]。
试验系统是NRL的增强版APS-137雷达,主要雷达参数如表7所示。由于改变极化方式需要调整馈电角,因此每次数据采集都采用单一极化,典型采样时长介于1200 ~1500 s之间。
测量数据主要由3种主要的特征参数描述,第1种是擦地角。试验场地之一位于Lihue机场,天线架设高度距离平均海平面约23 m,在VV/HH极化条件下,波门中心与雷达的直线距离分别为5.74 km和6.11 km,对应的擦地角分别为0.23°和0.22°。另一处试验场地位于Makaha山脊,天线架设高度距离平均海平面约460 m,对应的最小和最大擦地角分别为0.83°和2.63°。第2种描述参数是相对几何位置,由雷达波束方向和风向决定。总地来看,在Lihue机场,主要以逆风向和侧风向为主,高PRF试验期间,最小和最大的波束指向分别为37°和159°,而最小和最大风向分别为39°和99°(均为相对于正北的方向)。风速范围为5~12.3 m/s,有效波高范围为1.5~3.2 m,对应的海况覆盖范围为2~5级,其中,3~4级海况较为常见。在较高海况条件下,雷达观测海域将会明显出现白浪和波浪破碎现象。第3种描述参数是极化,受试验系统限制,不能同时采集两种极化的数据,但在试验期间,在较短的时间间隔内(约6 h)对近似相同条件下的不同极化数据都进行了采集,以便于对比分析极化的影响。

表7 X波段雷达参数Tab.7 X-band radar parameters
文献[12]在3种不同的时间/空间尺度上对测量数据进行了详细分析,统计分析结果表明,海尖峰事件之间存在很大的差异性,且韦布尔分布的拟合效果相对较好,但是单一的海尖峰事件又与韦布尔分布有所偏离,且不同海尖峰之间具有细微的差异。在后续研究中,仍然有待探索对海尖峰数据拟合度较好的统计分布模型。
2.5 西班牙南海岸Ka波段雷达海杂波测量试验
在西班牙国家科学技术研究委员会的支持下,马德里理工大学相关研究人员于2006年在西班牙南海岸利用自研的Ka波段线性调频连续波(Linear Frequency Modulated Continuous Wave, LFMCW)雷达,开展了高分辨率、小擦地角海杂波测量试验[13]。该雷达架设在海上交通管制塔顶端,高度约为50 m,俯视直布罗陀海峡(如图10所示),该架设位置可以监视欧洲海岸线的一个关键地点,即欧洲和非洲北海岸的自然边界。
LFMCW雷达为HH极化、全相参体制,工作频率在28~30 GHz之间,最大带宽为2 GHz,PRF最大为3 kHz,波束宽度为3°。雷达系统照片如图11所示。该雷达具有两大特色,一是采集量程和采集距离波门可通过调整系统参数进行设置,二是波形参数可现场配置。
在本次试验中,分别在2种距离波门、3种距离分辨率和2种方位角条件下测量了海杂波数据,雷达天线均工作在驻留模式。试验周期为3天,根据当地气象站提供的信息,试验期间的海况约为3~4级。表8给出了主要的雷达系统参数和试验参数。需要注意的是,本次试验记录的海况等级是根据Beaufort风速等级推断得到的。通常情况下,只有在已知持续时间(风吹过的时间长度)和风量(风吹过的海面范围)的情况下,才能根据Beaufort风速等级给出可靠的浪高估计,而试验记录信息未描述上述参数,因此,试验记录的海况等级并不是严格意义上的Douglas海况。
2.6 UCL单/双基地雷达海杂波测量试验
该试验由Hugh Griffiths团队组织实施,采用的试验雷达是由UCL研发的S波段多基地雷达系统NetRAD,其主要参数在表9给出,它具有1套发射机和3套接收机,其中,两套接收机部署在远离发射机的位置,根据节点配置可开展单基地、多基地海杂波测量试验。接收机节点采用南非开普顿大学(University of Cape Town, UCT)研发的GPS驯服晶振(GPS Disciplined Oscillators, GPSDO)进行无线同步[19—23]。

图10 架设位置和观测方位角Fig.10 Location of the deployment site and azimuth angles

图11 LFMCW雷达系统Fig.11 LFMCW radar system

表8 LFMCW雷达参数和试验参数Tab.8 LFMCW radar and experimental parameters

表9 NetRAD系统参数Tab.9 NetRAD system parameters
利用该试验系统,UCL和UCT科研团队先后在2010年10月和2011年6月联合开展了两次海杂波测量试验,试验期间的海洋环境信息均由试验场地附近的气象站提供。
2010年试验时,采用了两个接收机节点,同时采集了单基地和双基地条件下的海杂波数据,其中,单基地节点和双基地节点的接收机架设高度分别为12 m和10 m,通过调整天线波束指向使其在不同双基地距离上交汇。试验共测量了5种不同双基地角条件下的数据,分别是15°, 30°, 60°, 90°和120°,极化方式为同极化(HH和VV极化)和交叉极化(HV极化),擦地角范围为0.8°~2.3°。在低海况试验时,基线长度为416 m,风速约为3.1 m/s,海况约为2级;在高海况时,基线长度为1827 m,风速约为10.18~12.3 m/s,海况约为4~5级[20]。利用该数据,重点对海杂波的均值散射系数、幅度分布和多普勒谱特性进行了分析,并阐明了双基地雷达系统在抑制海尖峰方面的优势。
2011年试验时,参数集合更加多样化,包括双基地几何配置参数、海况、极化等,其中,最显著的特点在于本次试验同时采用了3个接收机节点,这就可以同时采集同极化和交叉极化条件下的双基地海杂波数据,以便于比较不同极化条件下海杂波特性的差异。每次测量时,双基地角在60°~120°之间,按照5°~15°步进的形式得到7组数据,如此重复3次,共得到了21组测量数据,这就允许对不同双基地角条件下海杂波特性的差异进行更加精细化的分析。擦地角范围为0.7°~1.12°。试验期间,风速约为8~9 m/s,浪高约为2 m,海况约为4级,这些参数在试验期间基本保持不变[23]。本次试验数据更加有助于理解海杂波随多种因素影响而表现出的差异性,以便于设计和应用更加有效的双基地雷达系统和目标检测方法,以有效改善海上低可观测目标(如渔船或潜望镜等)的检测性能。
3 机载雷达海杂波测量试验
在机载条件下,受照射面积差异、平台运动、平台高度等多种因素的影响,海杂波特性及模型与岸基固定平台相比有很大差异,开展试验、获取试验数据的难度也明显变大,且机载平台无法以波束驻留模式对同一片海域进行长时间观测,因此数据时长有限,在处理分析时为保证统计准确性通常需要对不同方位角、不同距离单元的数据联合处理。公开文献中记录的机载雷达海杂波测量试验同样有很多,其中,试验过程记录较为完整的几次试验分别是:美国NRL的机载四频率(分别为UHF, L,C和X波段)雷达海杂波测量试验[3,29]、美国山顶计划和多通道机载雷达测量(Multi-Channel Airborne Radar Measurements, MCARM)计划[30—32]、加拿大利顿系统有限公司(Litton Systems Canada Limited, LSCL, 现为Northrop Grumman公司的子公司)的X波段雷达海杂波测量试验[33,34]、DSTO的X波段雷达海杂波测量试验[35,36]、加拿大国防研究与发展部(Defence Research and Development Canada, DRDC)的X波段宽带试验机载雷达(X-band Wideband Experimental Airborne Radar,XWEAR)海杂波测量试验[37,38]、德国弗劳恩霍夫高频物理与雷达技术研究所(Fraunhofer Institute for High Frequency Physics and Radar Techniques,FHR)的相控阵多功能成像雷达(Phased-Array Multifunctional Imaging Radar, PAMIR)海杂波测量试验[39—41]。
3.1 NRL的机载四频率雷达海杂波测量
在20世纪60年代后期,NRL开展了机载四频率雷达(4FR雷达)海杂波测量试验,首次在如此宽的雷达频率范围内采集了机载雷达海杂波数据,该数据在历史上也是独一无二的。在试验中,采用UHF波段(428 MHz)、L波段(1228 MHz)、C波段(4455 MHz)和X波段(8910 MHz)雷达,分别在HH/VV极化条件下,对顺风、逆风和侧风的海杂波进行了测量。雷达系统用标准金属球做了校准,用测量船只记录了观测海域的风速和浪高。试验数据覆盖的风速范围为2.57~25.7 m/s,擦地角为5°~90°[29]。利用该数据,研究人员系统梳理了海杂波与擦地角、频率、极化和风速/风向等因素的依赖关系,并与Masuko等机载测量结果进行了对比分析。
4FR雷达海杂波测量试验的详细试验过程及参数在技术报告[29]中均有记录,在《雷达手册》中,对主要的分析结论和图表进行了归纳梳理[3]。图12给出了平均风速(约7.72 m/s)条件下,较为典型的海杂波特性一般趋势曲线,其中,L, C和X波段数据的功率水平变化不超出± 5 dB。可以看出,交叉极化对海杂波具有明显的抑制作用;随擦地角(即入射余角)的增加,海杂波功率水平明显增大,80°擦地角比10°时高出30 dB以上;在擦地角小于60°时,VV极化海杂波功率水平高于HH极化,最大差异接近8 dB。更多分析结论和趋势曲线可查阅上述两篇文献,这里不再赘述。

图12 海杂波特性一般趋势曲线Fig.12 General trend curves of sea clutter property
3.2 美国山顶计划
20世纪90年代,美国海军与国防部高级研究计划署(Defense Advanced Research Projects Agency, DARPA)签署协议,由DARPA牵头实施了山顶计划(MountainTop Program),以研究下一代机载预警(Airborne Early Warning, AEW)雷达所需的先进信号处理及其它相关技术。1993年前后,先后在新墨西哥州白沙导弹靶场(White Sands Missile Range, WSMR),以及夏威夷太平洋试验区(Pacific Missile Range Facility, PMRF)的几个山顶开展了数据采集试验,其中,海杂波数据是测量数据集的一部分[30]。
该试验并非真正意义上的机载海杂波测量,但是却提供了一个由固定平台转机载平台海杂波的有效途径,其核心技术是逆相位中心偏置天线(Inverse Displaced Phase Center Array, IDPCA)的应用。利用IDPCA,可以在固定平台上产生出与机载平台具有相同时空特性的杂波数据。试验时收发天线分离,发射天线采用专门设计的IDPCA,用于模仿从飞行平台上发射波束,它由16个子阵构成等效线阵,线阵轴线与水平面平行,发射信号频率为450 MHz。工作时每个子阵沿线阵轴线方向交替发射,由此接收到的回波就具备了运动平台的特征。接收天线由RSTER(Radar Surveillance Technology Experimental Radar)负责,它是一部UHF波段雷达,最初设计为空域搜索雷达,由DARPA在1992年12月份购买以支持山顶计划,雷达天线由14个等效阵元组成,宽5 m,高10 m, HH极化,每个阵列都有独立的相位调整器、发射器和接收器,每个相干处理间隔(Coherent Processing Interval,CPI)有16个脉冲。RSTER系统参数如表10所示。RSTER还同时负责接收回波的信号处理。
在1993年早期的试验中,RSTER部署在WSMR的North Oscura Peak(NOP), NOP位于WSMR的东南角,高出海平面约2438 m,高出沙漠平面约1066 m。该场地可以提供360°的视野,视线方向的地貌特征包括沙漠、无遮挡和树木茂密的小山、山峰和城郊区域等。
1994年10月开展的试验中,RSTER部署在PMRF的Makaha山脊上,高出海平面约457 m,并且与Niihau岛(一个临岛)以及下方的海域之间在视野上无遮挡。该场地非常适合研究海上AEW雷达的相关问题,包括海面舰艇、掠海飞行的无人机等一系列海上目标的检测问题。
山顶计划采集的数据主要用来支持空时自适应处理(Space-Time Adaptive Processing, STAP)的评估和单/多基地散射特性分析和建模研究。采集的部分数据保存在CREST(Common Research Environment for STAP)的主机中,位于Maui高性能计算中心(Maui High Performance Computing Center, MHPCC),并由Rome实验室提供数据维护方面的技术支持。CREST数据库的访问网址为http://www.crest.mhpcc.edu,在国内,由于IP地址权限问题,暂无法访问该链接。

表10 RSTER系统参数Tab.10 RSTER system parameters
3.3 美国MCARM计划
1995—1996年,美国空军研究实验室(Air Force Research Lab, AFRL)及Northrop Grumman公司合作开展了L波段MCARM计划。该计划采用有源孔径和多中频接收机采集多通道杂波数据,载机为英国航空航天公司(British Aerospace Corporation,BAC)的1-11飞机。试验采集的杂波数据除海杂波、陆海交界杂波之外,还包括陆地、城区等典型地物杂波,这些数据为机载雷达信号处理(尤其是STAP技术)研究提供了有力的数据支撑[31,32]。
表11给出了MCARM计划采用的雷达参数,其PRF可调,其中,单基地试验时可选参数为0.5 kHz(低PRF)、2 kHz(中PRF)和7 kHz(高PRF),双基地试验时为0.313 kHz和23 kHz,雷达天线包含16列8行共128个单元,正侧面天线阵安装在飞机前部左侧的雷达罩内。该雷达共有24路接收通道,其中2路分别接收和波束与方位差波束信号,其余22路接收22个子阵的信号,所有通道数据在试验时都进行了采集。在1996年试验时,还验证了实时实现的STAP处理技术。

表11 MCARM计划的雷达参数Tab.11 Radar parameters of the MCARM program
3.4 LSCL机载海杂波测量试验
为支撑机载X波段海用监视雷达的目标检测算法改进升级计划,加拿大LSCL在1993年利用APS-504(V)5机载X波段雷达开展了多个飞行架次的机载海杂波测量试验,记录了大量高分辨率海杂波数据[33,34]。该雷达主要执行海上巡逻和搜索任务,已成功用于渔业巡逻、海冰和冰山探测、搜索救援、毒品拦截和其它特殊任务。
在文献[33,34]中,对3个架次的测量试验做了较为全面的描述,并对高分辨率海杂波的统计特性、时/空相关性(包括距离向和方位向)及其影响因素进行了分析,以支撑脉冲积累和扫描间积累处理方法的研究和优化。每个飞行架次持续约2~3 h,总的数据时长约5.6 h,飞行区域为纽芬兰岛附近的北大西洋上空。由于该区域没有放置测波设备和气象浮标,因此波浪信息缺失,风速/风向信息由近岸气象部门提供,并由机载导航系统计算得到风矢量。3个架次期间的Beaufort风速等级分别为3级、6级和4级,如果是充分发展的海面,对应的海况等级将分别是2级、5级和3级(实际上未被证实)。在所有的飞行中都存在低空的云,因此采集数据中包含了一些云雨杂波,然而,大多数数据在采集时都刻意避开了这些区域。
3个架次的飞行共采集了超过500组有效数据,每组包括约8000个样本点,量化位数为8位。发射脉宽为32 ns,采样率为70 MHz,采样点之间的距离间隔为2.14 m,大多数数据的PRF约为1250 Hz。一个波束内的脉冲数根据雷达工作模式而变化,对于将近70%的数据,脉冲数是15个或更多(最多21个),其余小于10个。在所有架次的测量试验中,雷达都没有开启灵敏度时间控制(Sensitivity Time Control, STC)功能,且几乎67%的数据都是在频率捷变模式下采集的。杂噪比(Clutter to Noise Ratio, CNR)高于10 dB的数据组数占比约30%,最高时可达33 dB。试验时还专门采集了逆风、侧风和顺风条件下的数据,占比约为20%。擦地角平均为1.56°,其中,80%为2.1°或更小。表12给出了该试验的主要参数。
通过上述数据的统计分析,研究人员发现,对数正态分布能拟合所有风向时的海杂波数据,韦布尔和K分布分别更适合侧风和逆风的情况。就时间相关性而言,海杂波和海尖峰的平均相关时间分别为8 ms和14 ms(或者更长),对于功率水平较高且尖锐的海杂波,采用频率捷变后可以显著降低脉冲之间的相关性,但是不能完全去除。

表12 LSCL试验的主要参数Tab.12 Main parameters of the LSCL experiment
3.5 DSTO机载海杂波测量试验
在1999年、2004年和2006年,DSTO分别开展了3次X波段机载雷达海杂波测量试验,并在编号为DSTO-TR-1236(2001年发布)[35]、DSTO-TR-1818(2006年发布)[36]的技术报告中和文献[42,43]详细记录了试验过程和数据分析结果,其中,后两次试验采集数据为中等以上擦地角海杂波(试验代码为SCT04),这类数据的特性分析结果在公开文献中较为罕见。下面重点围绕试验情况进行简要总结。
3.5.1 1999年试验情况
本次试验的背景是澳大利亚军方的P-3C装备升级计划(AIR5276计划),即,将已有的机载AN/APS-115雷达升级为以色列研制的Elta EL/M 2022A(V)3海上监视雷达,该新型雷达可大幅度提高P-3C的目标检测和跟踪性能,并采用高分辨率距离像和SAR成像两种模式使其兼具目标分类能力。为了对该雷达在澳大利亚周边海域的工作性能进行系统全面的评估,DSTO启动了代号为ESRL 38/97的海杂波测量计划,主要目的是采用与Elta EL/M 2022A(V)3雷达系统反潜作战模式具有近似参数的雷达系统采集海杂波数据,形成数据库,并依据数据分析结果选择合理的海杂波模型,以支撑新雷达的性能预测和评估工作[35]。
该试验于1999年2月在澳大利亚北部地区的海岸线附近开展,共持续3天,试验雷达为Ingara机载雷达,VV极化,载机平台为租用军方的Beech King Air 350飞机。与1993年的岸基试验相比,Ingara雷达在性能上有了大幅升级,如采样频率和采样位数分别升级到了100 MHz和8位。试验期间雷达工作在凝视模式,即天线方位角与载机飞行路径之间的夹角保持固定(本次试验固定在90°)。在表13中,对主要的试验参数进行了汇总,试验海域没有放置波浪浮标,所记录的海洋环境参数是由Savage渔船和飞机观测结果估计得到的。
本次试验共飞行8个架次,采集了9组数据,对应不同的飞行轨迹和观测方位角(如图13所示),其目的在于从不同的角度观察海面的涌浪并记录不同视角下的海杂波数据,以研究二者的相互依赖关系。载机飞行高度均为182 m左右,每组数据的采集脉冲数都达到90000个以上,可以保证统计分析结果的准确性,脉压后的距离采样点均为3297个。试验数据经预处理后,分别从幅度分布、相关性、多普勒谱等方面进行了较为系统性的统计分析。
3.5.2 2004年和2006年试验情况
2004年试验重点关注大擦地角条件下的海杂波特性及建模问题,擦地角范围为45°~80°,由于散射机理存在差异,因此小擦地角海杂波特性分析结论和模型在该条件下未必适用。
本次试验的目的是为澳大利亚政府的“空中7000”(Air 7000)多任务海上高空长航时(High-Altitude Long Endurance, HALE)无人机(Unmanned Aerial Vehicle, UAV)采购计划提供支持,即利用试验测量得到的海面回波数据,研究大擦地角海杂波和目标特征,从而更好地评估雷达性能,以降低装备采购决策中的风险[36]。试验雷达同样采用Ingara系统,典型试验参数在表14中给出。

表13 雷达系统参数和海洋环境参数Tab.13 Radar system and environmental parameters

图13 采集海杂波时的飞行轨迹Fig.13 Flight tracks for collection of sea clutter

表14 典型试验参数Tab.14 Typical experimental parameters
试验地点是澳大利亚林肯港(Port Lincoln)以南约100 km处的海域,该位置位于澳大利亚大陆架边缘。试验共持续18天,采集了不同海洋参数条件下的海杂波数据。试验期间的风浪信息由部署在试验海域附近的波浪浮标、澳大利亚皇家海军海洋学和气象学理事会、当地气象局共同提供。
2006年,在澳大利亚达尔文(Darwin)附近北部的开阔海域开展了第2次机载试验,试验实施方案与2004年类似,但是这次的擦地角范围为29°~38°,属于中等擦地角条件下的海杂波测量试验[42,43]。两次试验时,Ingara雷达均工作在聚束模式,飞机以逆时针方向绕指定的感兴趣点飞行,雷达波束始终指向该点。雷达平台每天至少围绕同一海域飞行6个完整的批次,以覆盖感兴趣的中等擦地角范围。
在随后发布的多篇技术报告和发表的公开论文中[44—47],从多个方面对该数据进行了系统性分析,包括幅度分布特性(重点关注的是拖尾建模)、距离/方位向的空间相关性、极化特性、海尖峰特性和多普勒谱特性等,得到了适用于中等以上擦地角海杂波的特性分析结论,建立了统计分布模型、短时多普勒谱模型等理论模型,并给出了典型的模型参数取值。在需要类似参数条件下的海杂波特性规律且尚不具备试验条件的情况下,可参考借鉴相关研究结论。
3.6 DRDC和FHR机载海杂波测量试验
在2008年和2009年,加拿大DRDC和德国FHR分别利用XWEAR和PAMIR两型试验雷达开展了中等擦地角(7°~28°)条件下的海杂波测量,以便于为HALE和中高空长航时(Middle-Altitude Long Endurance, MALE) UAV平台的雷达海上目标检测方法研究提供支撑[37]。
XWEAR主要用于支撑SAR, ISAR, GMTI雷达和海上监视雷达的关键技术研究。该雷达采用专为AN/APS-506海上监视雷达设计的数字扫描转换器,并针对SAR和GMTI控制模式进行了修改,天线伺服和电源也来自AN/APS-506雷达。该试验雷达的数据采集模式非常灵活,天线转速、扫描扇区、PRF、距离分辨率等参数均可进行设置[38]。PAMIR是由FHR设计并研制的试验型机载雷达系统,可为多项技术的研发提供平台,如SAR, GMTI信号处理技术等,它还可以与AER II系统联合应用开展机载双基地SAR成像试验。该雷达具备多种操作模式,如斜视条带SAR、聚束SAR、干涉SAR、扫描MTI和ISAR等[39]。
2008年试验于2008年10月份在加拿大哈利法克斯(Halifax)东海岸开展,雷达系统采用XWEAR,数据采集时雷达工作在聚束模式,波束中心指向固定的地理位置(44°30′N, 63°25′W)。飞机围绕不同的高度,以100 m/s的速度沿着半径为15 km的圆形轨迹飞行。试验辅助数据(如风速/风向、有效波高、波浪周期等)从加拿大渔业和海洋档案馆波浪浮标(编号为44258)中获取并记录,典型的有效波高范围为1.97~2.21 m,对应4级海况。2009年试验于2009年12月份在德国Helgoland和Wilhelmshaven之间的北海开展,雷达系统采用PAMIR,工作在扫描MTI条带模式,并以侧视方式测量海杂波数据。载机分别沿两条平行且方向相反的路径飞行,对应逆风和顺风两种情况。海洋环境参数由测风装置、波浪浮标和当地气象部门提供,海况中等,涌浪高度约为0.9~1.5 m。两次试验期间的参数在表15中给出。
在图14中,以瀑布图的形式给出了XWEAR测量数据在不同擦地角条件下的多普勒谱估计结果,图14(a)—图14(c)依次是7°, 15°和28°擦地角,其中,绿线和蓝线分别对应顺浪和逆浪方向,在相同擦地角和方位角时相邻曲线之间的时间间隔约为1 s。虚线是平均多普勒谱,实线是8点平滑后的结果,黑色实线是多普勒谱的归一化协方差。从图中可明显看出擦地角和浪向对多普勒谱的影响,主要体现在谱形状、平滑度、中心频率等多个方面,在文献[37]中,结合不同擦地角条件下海杂波形成的物理机理对分析结果进行了详细解释。
4 造浪池海杂波测量试验
除外场岸基或机载试验外,利用造浪池开展海杂波测量试验是另一种重要的海杂波数据获取手段。尽管计算机模拟出的水面环境难以真实还原实际的复杂海洋环境,但是由于可控因素较多、可重复性强,因此便于开展系统性的定量分析,在探索不同波浪类型的后向散射机理及其回波特性、海杂波特性随不同外界因素的变化趋势等方面的研究中具有一定的优势。

表15 两型机载雷达系统试验参数Tab.15 Experimental parameters of two airborne radar systems
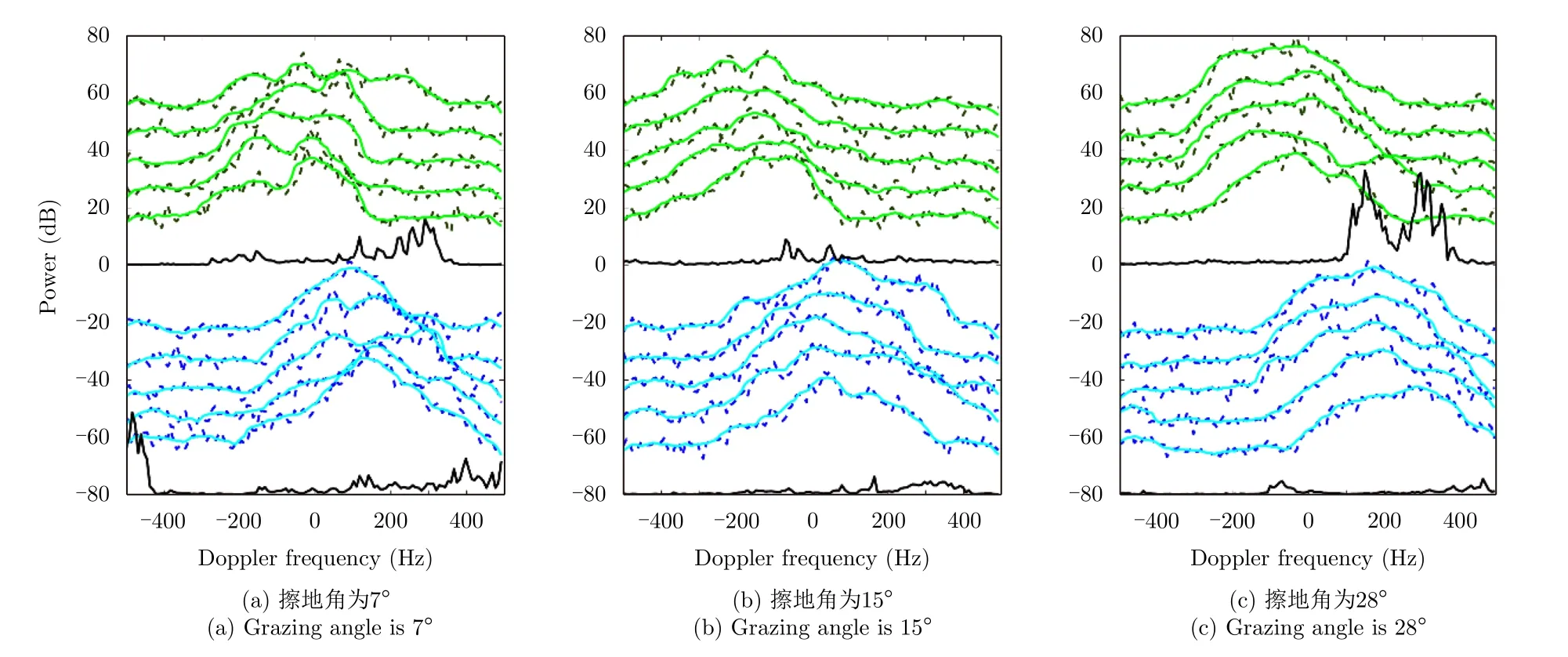
图14 不同擦地角条件下的多普勒谱Fig.14 Doppler spectrum at different grazing angles
在造浪池海杂波测量方面,较有代表性的是美国加利福尼亚大学圣塔芭芭拉分校(University of California, Santa Barbara, UCSB)海洋工程实验室(Ocean Engineering Laboratory, OEL)开展的试验,又称UCSB试验[48—53]。该试验采用的造浪池长53.3 m,宽4.26 m,深2.13 m,并配有风洞。风洞延伸30.5 m长,其截面为矩形,与造浪池宽度相同,顶端距水平面1.5 m。风洞开口端距离雷达17 m,测试段距离雷达约40 m。风洞产生的风力可控,最大风速可达12 m/s,可产生的风浪波长在0.1~0.75 m之间。造浪设备除风洞外,还可采用计算机控制的机械式波浪发生器,它可以产生出更大尺度的波浪或碎浪,波长介于0.6~4 m之间。在造浪池末端配有升降平台,可供雷达系统架设安装,通过控制升降平台的高度,可以测量不同擦地角条件下的海杂波数据。
利用该造浪池已开展了多次海杂波测量试验,配套采用的雷达系统包括PCR(Pulse-Chirped Radar)、FMCW雷达和英国的MIDAS(Mobile Instrumented Data Acquisition System)等。PCR是X波段试验雷达,在8.5~9.6 GHz频段范围内,有32个工作频点,全极化,距离分辨率为13.6 cm。FMCW是C波段试验雷达,HH/VV双极化,试验时雷达工作频率和带宽典型值分别为6 GHz和4 GHz,对应的距离分辨率为3.75 cm。与雷达同步的水面实时影像由高速摄像设备获取。MIDAS雷达为脉冲多普勒体制,带宽为500 MHz,距离分辨率为30 cm,工作频率可在3~94 GHz之间设置,HH/VV双极化。在试验时,通过调整升降平台的高度来改变擦地角,共测量了10种不同擦地角条件下的数据,覆盖3°~24°。FMCW和MIDAS雷达系统的试验参数在表16中给出。

表16 造浪池试验雷达系统主要参数Tab.16 Main radar system parameters of wave tank experiment
除UCSB试验以外,东京大学工业科学学院(Institute of Industrial Science, IIS)在2005年利用其海洋工程造浪池也开展了海杂波测量试验[48]。该造浪池长50 m,宽10 m,其波浪产生器拥有32个独立控制的柱塞,可以用来制造多向波,但是在试验时实际只用了1个。造浪池未配置风洞,只能利用风机在较短的距离内吹向水面使其变得粗糙。雷达架设在靠近风机的区域,照射区域的中心距离风机10 m,距离波浪产生器18 m。在试验时同时采用1个波线阵列和2个摄像机同步记录了波浪的高程数据和波浪影像。试验采用的雷达类型为连续波散射计,散射计安装在转台上,在方位和俯仰方向都可以转动。IIS雷达系统的主要试验参数如表16所示。在无风或有风条件下,一共产生了41种不同类型的波浪,包括规则波(Regular waves)、孤子波(Solitons)、聚焦波(Focussing waves)和本杰明型(Benjamin-Fier)破碎波等。该试验数据有效支撑了海杂波多普勒谱特性及其随擦地角、方位角之间依赖性的研究。
5 国内开展的海杂波测量试验
从公开文献来看,国内众多研究所、高校等单位在海杂波测量、特性研究与建模、海杂波抑制和目标检测等方面具有丰厚的技术积累,并且在基础理论、关键技术、工程应用3个方面取得了一大批先进的创新成果,为有效补齐雷达装备短板、提升海上目标探测性能奠定了坚实的基础。这些单位包括中国电科第22所、第38所、第14所等研究所,以及西安电子科技大学、电子科技大学、哈尔滨工业大学、哈尔滨工程大学、南京理工大学、北京理工大学、大连海事大学、国防科技大学、空军预警学院、海军航空大学等高校。
在研究时除采用国外的IPIX数据和CSIR数据以外,在我国周边海域开展了多次海杂波测量试验并测量了典型条件下的海杂波和目标回波数据。几次典型的试验和数据应用基本情况如下。
南京电子研究所赵海云等人[54]利用某X波段雷达海杂波测量试验获取的数据,分析了海杂波的幅度分布特性、相关性和谱特性,并计算了混沌特征量,验证了海杂波的可预测性。
空军预警学院刘志高等人[55]利用某S波段两坐标雷达开展海杂波测量试验,分析了海杂波的幅度分布特性。该雷达架设高度为82 m,天线仰角为1.2°,线极化,试验期间天气晴朗,风速较低。
哈尔滨工业大学电子工程技术研究所利用自研的高频地波舰载OTH雷达,在我国黄海海域开展了海杂波和舰船目标回波测量试验。雷达工作频率为3~7 MHz,发射功率为1.5 kW,阵元数为10,接收天线阵列口径为100 m,积累时间为100 s。利用测量数据,提出了舰载雷达海杂波的理论与数学统计模型,并对海杂波相关性做了统计分析[56]。
北京理工大学周超等人利用课题组自研的Ku波段试验雷达开展了海杂波测量试验。雷达架设高度约90 m,波束驻留,观测约4 km外的海面,擦地角约1.3°,信号带宽为100 MHz,方位/俯仰波束宽度分别为5°/7°,风速约2~3级。利用该数据对海杂波统计特性进行了分析,并提出了一种降低虚警率的工程处理方法[57]。
国防科技大学杨俊岭等人利用某C波段雷达海杂波测量试验获取的数据,对海尖峰统计特性进行了分析和建模,主要试验参数如表17所示。研究结果表明,二项分布和泊松分布均可以在低虚警概率下较好描述海尖峰的统计特性[58]。

表17 C波段雷达主要试验参数Tab.17 Main parameters of the C-band radar experiment
西电雷达信号处理重点实验室于近几年利用X波段试验雷达,在连云港海域开展了海杂波和合作目标回波测量试验。雷达工作频率为9 GHz, PRF为1 kHz,带宽为75 MHz,距离分辨率为2 m,方位/俯仰波束宽度分别为2.5°/4°,在每个波束内共发射3个非相参脉冲。雷达架设高度为100 m,观测海域与雷达的距离介于6.5~9.5 km之间,均为小擦地角情况。合作目标船包括长度为20 m的渔船和长度为5 m的小木船,渔船拖着木船运动,对于2 m分辨率的雷达而言,它们均是距离扩展目标。许述文等人[59]利用该数据,研究了重拖尾海杂波中雷达目标的非相参检测方法。
除上述试验外,中国电科第22所电波环境特性及模化技术重点实验室、海军航空大学(原海军航空工程学院)海上目标探测课题组也开展了较为系统性的海杂波测量试验和相关研究工作,下面分别进行简要介绍。
5.1 中国电科第22所的海杂波测量试验
中国电科第22所是国内较早开展海杂波测量试验的科研单位之一。较早的一次试验记录是1998年6月,利用矢量网络分析仪,在青岛近海海域开展了多波段(S, C, X和Ku波段)海杂波测量试验,并同步测量了海水的介电常数,记录了海面和环境的实况参数,包括海况、浪向、波高、波周期、风速等,并对测量数据进行了统计分析,包括海杂波的多普勒谱、幅度分布、均值散射系数的变化等[60]。
近年来,随着试验条件的不断完善,22所先后开展了P, L和S波段岸基雷达海杂波测量试验,在不同分辨率、不同海况等多种条件下获取了海杂波测量数据,并围绕均值散射系数、幅度分布特性、时间相关性等内容开展了研究[61—67]。以L波段雷达海杂波测量试验为例,在文献[64]中,对本次试验做了较为详细的说明。雷达架设于青岛市海拔100 m的岸基平台上,面向方位201°观测黄海海域,观测的擦地角范围为1.5°~6.5°,试验时同步记录了有效波高、风速、风向和波向,如图15所示,可以看出,最大波高为1.6 m,最大风速为11.1 m/s,最高海况达4~5级。基于该数据提出了两分量高斯模型,在描述海杂波幅度均值散射系数随风速的变化关系上优于国外已有模型,表明在L波段,新模型更加适合我国黄海海域,可为雷达系统设计和雷达海杂波预测提供技术支撑。
5.2 海军航空大学的海杂波测量试验
海军航空大学海上目标探测课题组从“十五”开始开展海杂波特性、海上目标检测与跟踪技术研究,历经10余年的条件建设和技术积累,在海杂波采集、分析、建模与抑制,海上目标特性分析、建模与特征提取,海上目标检测、跟踪与识别,对海雷达探测新机理、新方法,雷达海上目标探测试验与评估分析等方面取得了一定的成果[68—80]。

图15 试验时的海洋环境参数Fig.15 Sea environmental parameters during experiment
课题组利用濒海的有利条件,建设了海上目标探测实验室。实验室位于山东烟台,紧靠大海,地理位置优越,周边区域的海面和空中航道密集,水面船只和空中目标众多。实验室拥有多型试验雷达,以及AIS、ADS-B、气象仪、罗经、GPS、激光测距仪、波浪浮标、多型标准反射体、帆船、橡皮艇等试验辅助设施,具备长期、系统开展雷达海上目标探测试验的能力。为配合数据采集需要,课题组研发了多套高速数据采集系统,搭建了数据库服务器,开发了配套的数据库管理软件,制定了雷达数据采集和入库规范,所记录的信息包括海杂波数据、目标数据、天气状况信息、海面状况信息、AIS数据、红外数据等。目前,已采集并入库管理的雷达海杂波和目标回波数据覆盖不同平台、海况(低、中、高海况)、波段、极化、擦地角(最低小于1°,最大可达70°)、目标类型(包括多型海面目标和低空飞行目标),有效数据量达20 TB以上。
利用实验室提供的有利条件,课题组近些年在海上目标探测技术方向积累了多项关键技术,包括:非高斯、非平稳、非线性条件下的海杂波特性认知新方法,复杂非均匀背景下的CFAR检测技术,分数阶傅里叶域处理技术,分形处理技术,多目标检测前跟踪技术,工程应用技术等。目前主攻方向为雷达精细化信号处理和智能化处理方面的理论研究和工程应用转化工作。
6 海上目标探测试验中心建设情况
目前,国内很多单位在开展对海探测试验时,大多以选择临时场地为主,存在试验人员保障难、辅助设施不配套、雷达设备安全保障不到位等问题。因此,迫切需要建设海上目标探测试验中心,以提供贴近实际的海面环境、保障有力的试验地点、合适的架设平台、齐备的试验辅助设施,以开展多种条件下的试验并获取丰富的实测数据。试验中心建设是开展海上目标及环境特性基础研究的需要,开展多种手段探测和识别技术研究的需要,开展试验验证和工程转化的需要,也是开展对海探测雷达性能评估研究的需要。
立足于上述需求,充分利用军民融合政策优势,采取联合共建方式,依托烟台养马岛靠山面海的优越地理环境,按照3个阶段规划在山东烟台完成试验中心建设。
(1) 建设试验中心固定试验点,形成岸基雷达试验保障能力。
第1阶段目标是以某一地理条件优越的地点建设海上目标探测试验中心,可开展各类岸基雷达对海和对低空探测的试验任务。
该阶段目标目前已完成,试验中心位于养马岛某地,该场地座山面海,远离市区,地理环境优越,面临海上航道,海上目标类型丰富,且便于雷达设备和试验人员保障。在养马岛这一固定地点的基础上,充分发挥芝罘湾海域得天独厚的地理优势,以现有试验条件建设为基础,新建芝罘岛东口试验场、烟台山塔顶平台、东炮台试验平台,以上扩建或新建的为固定式试验平台;在崆峒岛、养马岛、渔人码头建设流动式试验场地。
(2) 建设试验中心海上移动试验点,形成船载雷达试验保障能力。
第2阶段目标是建设试验中心的船载试验点,可开展各类船载雷达对海和对空探测的试验任务,一方面具备稳定可调度的船只,可架设各类型船载雷达并供电,可在较为复杂海况下开展对海对空探测试验,另一方面具备稳定可调度的配试目标(如海上船只、无人机等),形成较为完备的船载平台海上目标探测试验保障能力。
(3) 建设试验中心空基试验点,形成机载与星载雷达试验保障能力。
第3阶段目标是建立试验中心的机载试验点,可开展各类机载与星载雷达对海和对空探测的试验任务。对于小型或微型雷达,可提供无人机载平台架设雷达,配合完成试验任务;对于中大型雷达,可协调周边非军用飞机(或自行购置小型载人飞机等)及海面上空航线,配合完成试验任务,形成较强的空基平台海上目标探测试验保障能力。
7 试验展望
海杂波特性研究是一项重要的基础性研究工作,研究结果直接关乎雷达对海模式下的系统参数如何选择、海杂波抑制和目标检测方法如何设计等核心问题,而开展海杂波测量试验,并获取不同参数影响下的测量数据,是有效支撑该研究的重要前提。从国内外的试验情况来看,尽管这项工作已经持续开展了数十年,但是一些基础问题仍然难以回答,例如已有特性分析结果或模型能否适用于新的海域、新的平台等,因此海杂波测量试验仍在继续并且是雷达研制各环节的重要工作之一。通过对国内外试验情况的综合对比,并结合海杂波抑制和目标检测方法对海杂波特性及模型的需求,总结梳理出后续海杂波测量试验方面仍需进一步重点关注的方向,主要有以下几个方面。
(1) 系统性、持续性的海杂波测量试验仍需进一步开展,并加强试验辅助信息的同步记录。
海杂波是多种因素影响下的复杂函数,通过零星开展试验得到的数据分析结果通常具有很大的局限性,通过仿真手段进行研究更是毫无价值。同时,海杂波理论模型也有很多,仅仅是公开文献中涉及到的均值散射系数模型、统计分布模型、多普勒谱模型和相关性模型4种类型,总数就不下30种,这些模型怎么选、怎么用,都还没有得到很好的解决。因此,无论是从理论研究还是工程应用方面的需求考虑,均需有针对性地开展长期、系统、持续、深入的研究,例如不同平台、不同波段、不同分辨率、不同擦地角、不同海域、不同海况等条件下的海杂波测量试验及特性研究。通过海量测量数据的分析处理,才能形成有价值的特性分析结论或特性变化趋势,比如不同雷达参数和海洋环境参数等条件下的海杂波特性变化规律、不同海域和海况条件下适用的海杂波模型及模型参数取值范围、不同擦地角条件下海杂波特性的定性或定量变化规律、海杂波特征参数(如谱宽、中心频率、相关时间等)与典型影响因素之间的经验或半经验关系模型等。在试验时,还需采用多种辅助设备同步记录试验周边海域的风速/风向、浪高/浪向等海洋环境参数,以及GPS, AIS, ADS-B等设备提供的海面和空中目标信息。这种系统性、持续性的海杂波测量试验是开展海杂波特性基础研究的必经之路,也只有借助试验数据的不断积累、不断完善、不断总结,才有望在未来数年或数十年时间里取得海杂波特性基础研究方面的重大突破。
(2) 任务背景牵引的海杂波测量试验及数据分析仍需强化。
在这方面工作中DSTO开展的试验较有代表性,例如,岸基S波段雷达海杂波测量试验是为了支撑澳洲反舰导弹防御系统的升级项目,岸基L波段XPAR雷达海杂波测量试验是为了支持代号为SEA1448的反舰导弹防御计划,1999年的机载X波段雷达海杂波测量试验是为了支持澳军方的P-3C装备升级计划,2004年的机载试验则是为澳大利亚政府的“空中7000”(Air 7000)多任务海上HALE UAV采购计划提供支持。
与海杂波基础特性研究所需开展的试验不同,这种试验通常具有明确的任务背景,这就意味着,试验平台或试验雷达系统参数相对固定或者仅在一定的范围内变动,例如波段、带宽、分辨率、极化等,而可变因素主要以部分雷达参数、海洋环境参数和相对几何位置参数为主。尽管该部分国外已做了大量工作,但出于各种原因,通常在文献中仅对试验基本情况和少量数据的分析结果进行公开,对国内相关领域的应用而言远不能满足需求,且国外数据在雷达系数参数、海域、海洋环境参数等方面与国内的差异性明显,特性分析结果或参数取值范围是否适用也具有很大的争议。因此,有必要结合国内的雷达研制、升级等具体任务背景,采用平台和系统参数近似的试验雷达系统深化海杂波测量试验及数据分析工作,从而为制定雷达系统设计方案、研制目标检测方法、优化选择雷达参数等工作提供理论依据和模型基础。
(3) 面向智能雷达应用的海杂波和目标回波数据集亟需构建。
近年来,深度学习理论在雷达领域得到了广泛的应用,它是一种高效的智能化信号处理方法,并有望助推雷达进入智能化时代。然而,深度学习方法应用的前提是训练数据集的支撑,目前,在SAR图像识别领域已有公开可用的数据集,即MASTER数据,而在海杂波数据方面尚属空白。在文献[78]中,对深度学习方法在海上微动目标检测与分类的应用上做了探索研究,其采用部分IPIX实测海杂波数据叠加仿真目标的形式构建了简易的且规模较小的数据集,证实了该方法的优越性能。在后续的深化研究中,亟需结合海杂波测量试验构建开放、共享的数据集,以规范化的形式记录多样化(包括多种波段、海况、目标类型等)的原始回波数据及辅助的标记信息,以支撑深度学习方法在海杂波抑制、目标检测与识别等方面的研究,并最终实现该成果从理论向实用的转化。
