基于脉振高频注入法的永磁同步电机初始位置检测优化算法研究
2019-06-26包广清
包广清,王 涛
(兰州理工大学,兰州 730050)
0 引言
近年来,随着高矫顽力、高剩磁的高性能永磁体的出现,永磁同步电机开始进入人们的视野。永磁同步电机的励磁来源采用的是永磁体,电机本身的体积小、噪声低、重量轻、运行可靠,功率密度可以得到显著提升[1],在航天国防、交通运输、装备制造、工业传动以及家用电器等诸多领域都开始使用[2],因此永磁同步电机应用前景非常广阔。
为了在永磁同步电机中采用闭环控制进行交流调速,因此需要知道准确的转子位置信息。目前获取转子位置信息和转速的方法主要是通过安装在转子上的位置传感器如霍尔传感器、光电编码器等,但是安装传感器使系统的复杂度增加,可靠性降低,成本提升[3],所以人们开始研究没有机械传感器的估测转速的方法。目前,永磁同步电机无传感器位置主要有两种:一种是外加激励信号的方法,即根据电机的凸极效应,给电机绕组中通入高频激励信号,通过分析电流信号提取转子位置;一种是不另外加激励信号的方法,即直接提取包含转子位置的信号。
不外加激励的方法多适用于转子在中高速范围内,采用电机模型中的反电动势来估测电机转子位置,如:模型参考自适应法[4]、状态观测器法[5]、滑膜观测器法[6]、扩展卡尔曼滤波器观测法[7]。但是,电机中反电动势的大小与电机转速成正比,不适用于零低速情况。针对电机转子测量中的低速及堵转情况等难点[8-9],高频信号注入法可以很好的实现无传感器永磁同步电机在低速和堵转两种状态下转子的位置检测[10-12]。高频信号可分为高频脉振信号[13]、旋转高频信号[14]和高频方波信号[15]。其中,高频脉振电压信号注入法相对比较简单,静动态性能比较好。但是在测量过程中需要多次使用滤波器来处理和控制信号,提取转子位置信息。多次使用滤波器,限制了电流环的带宽从而降低了驱动性能,对信号造成了一定的延时,降低了估测速度和位置估计的准确性。
针对以上问题,本文在对传统的高频脉振电压信号注入法检测转子位置的基础上,简化处理电流信号和系统结构从而减少部分滤波器的使用,达到优化传统高频脉振电压信号注入法的目的。通过仿真建模,来对比永磁同步电机在优化前后对电机转子位置测量的结果,验证优化方法的有效性。
1 传统的高频脉振电压注入法
为了简化计算的难度,假设:电动机的铁心是不饱和的,忽略掉电动机中的涡流和磁滞损耗,转子没有阻尼绕组,永磁体上面没有阻尼作用并且有正弦的反电动势。
据此,永磁同步电机在dq旋转坐标系中,定子电压方程的标准为
(1)
式中,Ud,Uq为d、q轴的电压;id,iq为d、q轴的电流;Ld,Lq为d、q轴电感;Rs为定子电阻;ψf为永磁体与定子交链的磁链;ωe为转子电角速度;p为微分算子。
在进行转子位置估计时,定义估计位置误差Δθ为
(2)

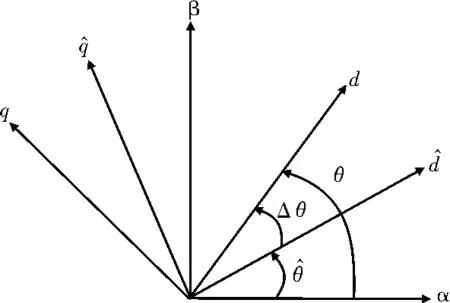
图1 各坐标系关系图

图1中对应的坐标系变换矩阵为
(3)
(4)
因为注入的高频信号的频率远高于电机旋转角频率,可以把电机看做为一个简单的R-L负载,此时在注入高频信号后在实际的参考轴下得到的定子电压方程经过Park变换后再转换为再估计参考轴系中的电流方程,有:
(5)
(6)
(7)
由于注入的是高频信号,其频率远超于电动机的基波频率,因此相对于电抗来说,可以忽略电阻的影响,故式(5)可简化为
(8)
其中,L=(Ld+Lq)/2为d-q电感增量的共模分量;ΔL=(Ld-Lq)/2位d-q轴电感增量的差模分量。
可见,当Δθ足够小时,式(8)中的q轴电流分量可以简化为如下的形式:
(9)


(10)

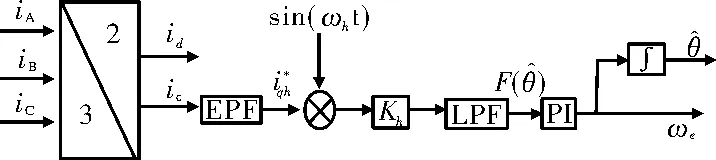
图2 转子的位置和速度估计结构原理图
由此可得出转子的位置,但是,在对电机采样电流进行处理过程中,较多次用到了滤波器滤波处理信号,由于滤波器是非理想特性,其多次使用导致相位的滞后,使得真实的位置角度要过多的超前估计转子位置角度,控制效果会相应的变差。
鉴于上述问题,本文将提出对电流信号处理过程进行优化,改善其估测性能,使对转子的位置和速度估计精度得到提升。
2 转子位置估计精度提升策略
在上一部分提到的电流信号处理过程中,首先使用到的带通滤波器其作用是滤除掉基频和PWM开关高频谐波的电流分量,获得高频电流信号。在估计的参考轴系中,以上3个电流的高频谐波电流分量为
(11)

(12)

(13)

(14)
PMM高频谐波分量频率和高频电压产生的高频电流的频率都远高与电机的旋转角频率。由以上三式,当通过低频滤波器后只会留下式(14)中的后一项,电流信号中含有转子的位置信息,其表达式为
(15)
由此,与传统的脉振高频电压注入法相比,可以较为精确的测量到转子位置。
优化后的电流信号原理图如图3所示。
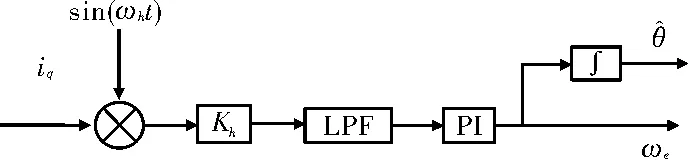
图3 优化后的电流信号结构原理图
3 转子极性辨识
在设计永磁同步电机时,为了使永磁材料的利用率提高,让电机磁路处于一定的饱和状态。利用电机磁路的饱和效应来进行磁极的判断,当让合适的电压通入电机的d轴(即N极)会使磁路处于过饱和状态,从而电感Ld降低;当合适的电压通入电机的q轴(即S极)使电机磁路退饱和,Ld随之增大。通过计算可得d轴电流为
(16)

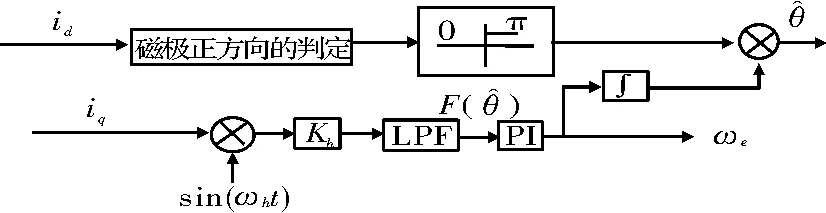
图4 改进后的测量转子位置角度处理过程
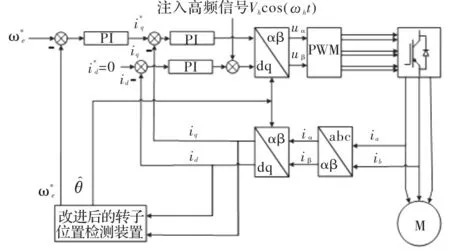
图5 脉振高频电压注入法的原理结构框图
4 仿真结果分析
为了验证上述所提到的方法检测转子位置的有效性,进行了研究。电机仿真参数设置如下:额定功率为1.25 kW;额定电压为230 V;极对数为4;d轴电感3.13 mH;q轴电感3.13 mH。选取注入的高频载波频率应远大于电机基波频率并且要远小于逆变器的开关频率所以为0.5 kHz;为了避免对电机的正常运行产生不好的影响选取高频载波信号的幅值为20 V。
图6系统的初始速度给定n=450 r/min,电机空载起动,在0.2 s时突加10 Nm负载,在0.35 s时给定转速降为n=200 r/min,检测对比优化前后的方法对电机的估计角位置和速度跟踪性能情况。
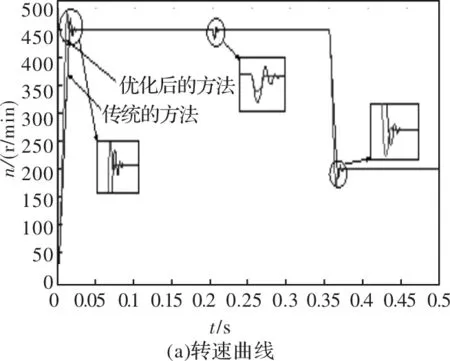
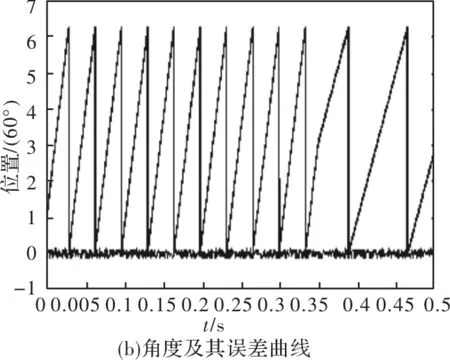
图6 空载起动及稳定后改变负载的估测曲线
图6(a)为电机转速跟踪曲线,由图可知优化后的脉振高频电压注入法在电机起动,加负载和改变转速等波动阶段可以优先于传统的方法进入稳定阶段,超调量小,可以较快速和稳定的跟踪给定转速并且比优化前缩短了将近1/3的时间,使电机的响应速度变快,动态性能提升。图6(b)为优化后的脉振高频电压注入法估计角度和误差曲线,由图可知,该方法在符合起动和改变转速时都可以稳定的跟踪电机转子位置,且角度误差在±3°以内。
图7是电机初始转速为n=450 r/min,在0.25 s后电机转速突变为n=-450 r/min过程中转子估计位置与实际位置和电机估计转速与实际转速的波形及其误差曲线。
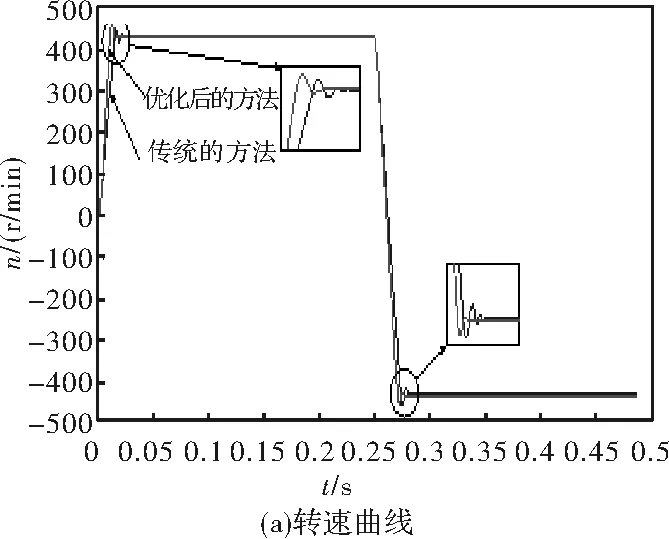
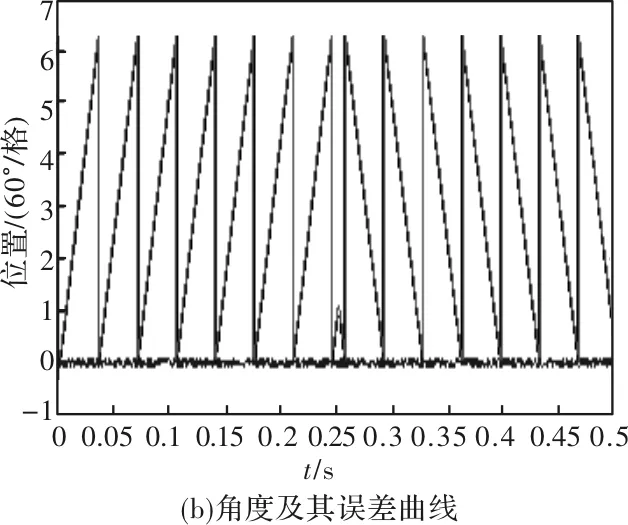
图7 电机正转稳定后改变转速方向的估测曲线
图7(a)为改变电机转速方向的电机转速跟踪曲线,由上图可知在电机改变转速阶段优化后的脉振高频电压注入法比传统的方法在电机转速有波动的情况下可以更稳定和快速的跟踪电机转速。图7(b)为优化后的脉振高频电压注入法在改变转速的过程中对电机转子的跟踪曲线和转子位置误差曲线。角度误差也在±3°以内。
仿真结果表明本文所提出的对转子位置估计优化的方法角度误差在电机复杂运行情况下波动都在±3°以内能够比传统的方法角度误差(±8°)更好的跟踪实际转子的位置,可以让无位置传感器控制系统能够可靠的运行。
5 结 语
本文针对高频脉振电压信号注入法无位置传感器控制系统进行了研究,该方法是给电机注入特定的高频电压信号,通过处理电机对高频电流响应的信号得到估计的转速和转子位置偏差信号,并相对于传统的方法进行了适当的优化,然后通过相关公式的推导得到电机转子位置和转速,再利用仿真建模研究验证。由结果可知,该方法对于硬件成本要求较低,系统的结构也有相应的简化,性能有所提升。并且在电机空载、负载和转速反转时与传统的方法相比误差变小,动态性能变好,对电机的转速和位置有更好的估测效果。
