基于幂次趋近律滑模观测器的无刷直流电机无位置传感器控制系统研究
2019-06-26周贝贝苏少平徐会风唐忠文
周贝贝,苏少平 ,徐会风,唐忠文
(西安交通大学 电气工程学院,西安 710000)
0 引 言
无刷直流电机由于结构简单、功率密度大等优点,获得了广泛的应用。在无刷直流电机的控制中,通常采用位置传感器来检测转子的位置。但是由于位置传感器的安装不准确,会直接影响电机的准确换相;同时,位置传感器的使用增加了控制系统的成本[1]。为了取代位置传感器,无位置传感器控制技术成了近些年来研究的重点。
目前,无位置传感器方式下的转子位置检测主要有反电动势法、磁链法、电感法、人工智能法等。
反电动势法是目前研究比较成熟的转子位置信号检测方法。这种方法原理简单,容易实现,但是电机的反电动势大小和电机转速成正比,所以在电机低速或零速时无法检测到反电动势[2]。电感法是首先在电机的相绕组中施加方波电压脉冲的同时检测绕组所产生的电流幅值大小,通过比较测量的电流大小就可以得到电感大小不同,再根据电感和转子位置关系进一步判断转子的具体位置[3]。但是无刷直流电机的转子在不同位置时电感差异较小,需要高精度的电流检测装置不断地检测电机电流。滑模观测器法的优点是可以借助观测模型得到不容易得到的变量,同时在一定程度上解决了系统参数变化、扰动带来的影响[4]。但是传统滑模观测器容易导致系统的抖振现象。
本文研究了滑模观测器的设计原理,提出一种利用幂次趋近律来代替等速趋近律的滑模观测器来消除抖振。通过分析选取合适的指数α,并基于此构建了基于幂次趋近律的滑模观测器。利用李雅普诺夫稳定性判据推导出观测器的增益取值范围。仿真和实验表明,基于幂次趋近律的滑模观测器有效消除了抖振,有较强的鲁棒性和稳定性。
1 无刷直流电机数学模型
图1为三相Y接形式的表贴式BLDCM等效电路,假设三相绕组对称。图中,T1~T6为功率器件。无刷直流电机的电压方程为[5]
(1)
式中,ua,ub,uc分别为三相定子端电压;R为定子电阻,L为定子等效电感;ea,eb,ec分别为三相绕组反电动势;ia,ib,ic分别为三相定子电流。
根据式(1)得到无刷直流电机线电压模型:
(2)
其中:eab=ea-eb,ebc=eb-ec为电机的线反电动势;uab=ua-ub,ubc=ub-uc为线电压;iab=ia-ib,ibc=ib-ic为相电流差。
(3)
由于采样周期很短,可认为转子转速不变,线反电动势的导数为0[6],则式(2)可写成式(3)的形式。
2 滑模观测器的设计
2.1 幂次趋近律的提出
对理想的变结构系统,即继电式变结构系统,滑动模态是降维光滑运动,且渐进地趋向原点,不会出现抖振。但具体实现理想变结构系统时,离散的开关特性会导致系统抖振。因此采用不同的趋近律,通过调整趋近律的参数达到削弱抖振的目的[7]。
(1)等速趋近律:

(4)
当K值取的比较大时,到达切换面的速度大,导致系统有比较严重的抖振现象。当K较小时,趋近速度小,虽然能够减小抖振,但到达切换面所用时间变长。
(2)幂次趋近律
(5)
采用幂次趋近律,可保证系统有限时间光滑到达切换面。分析如下:
当S>0(α>0,K>0),对式(5)积分,可得:
(6)
显然,当α<1时,有
(7)
从式(7)可得,S从S0在有限时间内到达S=0并且带宽为0,从而消除了抖振。当α>1,S→0时,t→∞,不能在有限时间内到达切换面,不满足变结构的可达性[8]。
2.2 幂次趋近律滑模观测器的设计
选择滑模面
(8)

取幂次趋近律:
(9)
设状态变量x=[iabibceabebc]T,输入为V=[uabubc]T,则可建立如下滑模观测器:
(10)
式中,γ1=R/L,γ2=1/L,k1、k2、k1h1、k2h2为滑模观测器的增益。
将式(10)减去式(3),可得观测器的误差方程为
(11)

(12)
对式(12)求导,并将式(11)代入,得

(13)
由于

(14)
γ2|e1||e3|+k1|e1|1+α+γ2|e2||e4|+k2|e2|1+α<0
(15)
由式(15)可得,当
(16)
当系统处于滑模面上时,有如下关系:
(17)
根据式(11)和式(17)得
(18)
取Lyapunov方程如下:
(19)
对式(19)求导,并将式(18)代入得:
(20)
(21)
2.3 位置估算
根据滑模观测器观测得到的线反电动势可以得到虚拟霍尔信号,然后将虚拟霍尔信号按表1解码为相对应的线反电动势。其中,当线反电动势大于0时为1,小于0时为-1。再根据线反电动势的正负就可以判断导通功率管。图2为经解码后由线反电动势得到的导通功率管逻辑换相仿真图。
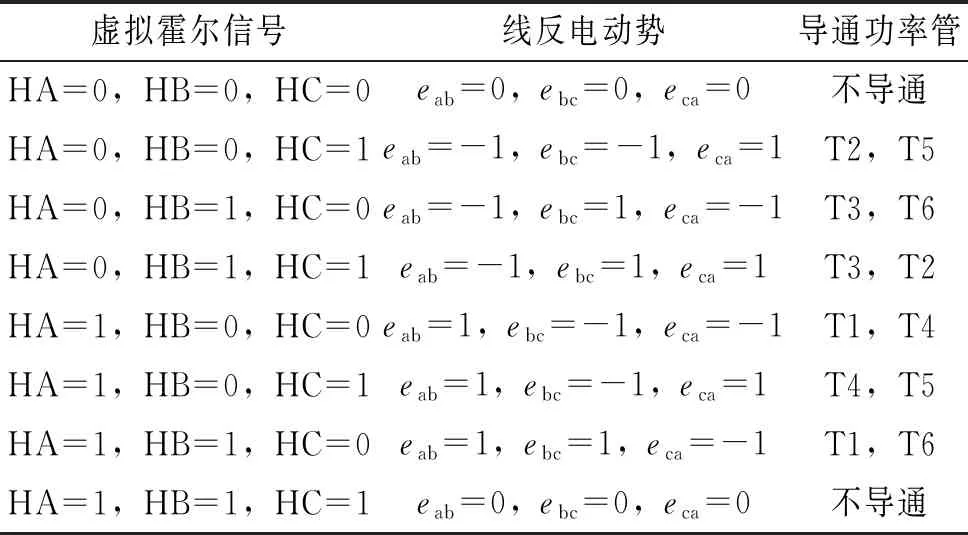
表1 虚拟霍尔信号与线反电动势的关系
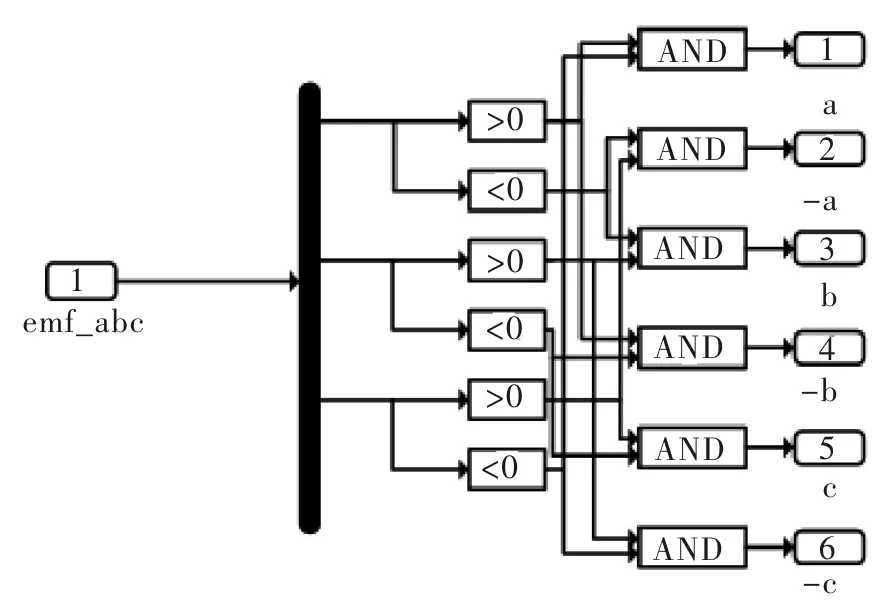
图2 逻辑换相仿真图
2.4 转速估算
转速计算主要实现无位置传感器控制系统的转子转速计算,电机的转速和反电动势的关系为n=60*f/p,式中p为电机的极对数。因此只要知道电机的线反电动势变化频率就可以知道电机转速大小。仿真模型如图3所示。
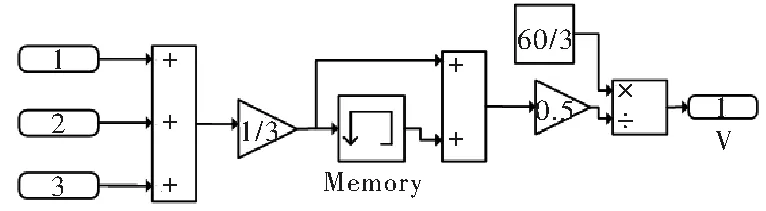
图3 转速估算模块
3 仿真研究
为了验证提出方法的有效性,利用Matlab/Simulink建立仿真模型,仿真中的电机参数为额定电压160V,额定电流5A,定子电阻0.173Ω,定子电感2mH,额定转速2000r/min,极对数为3。图4为基于幂次趋近律滑模观测器的无刷直流电机无位置传感器仿真图。
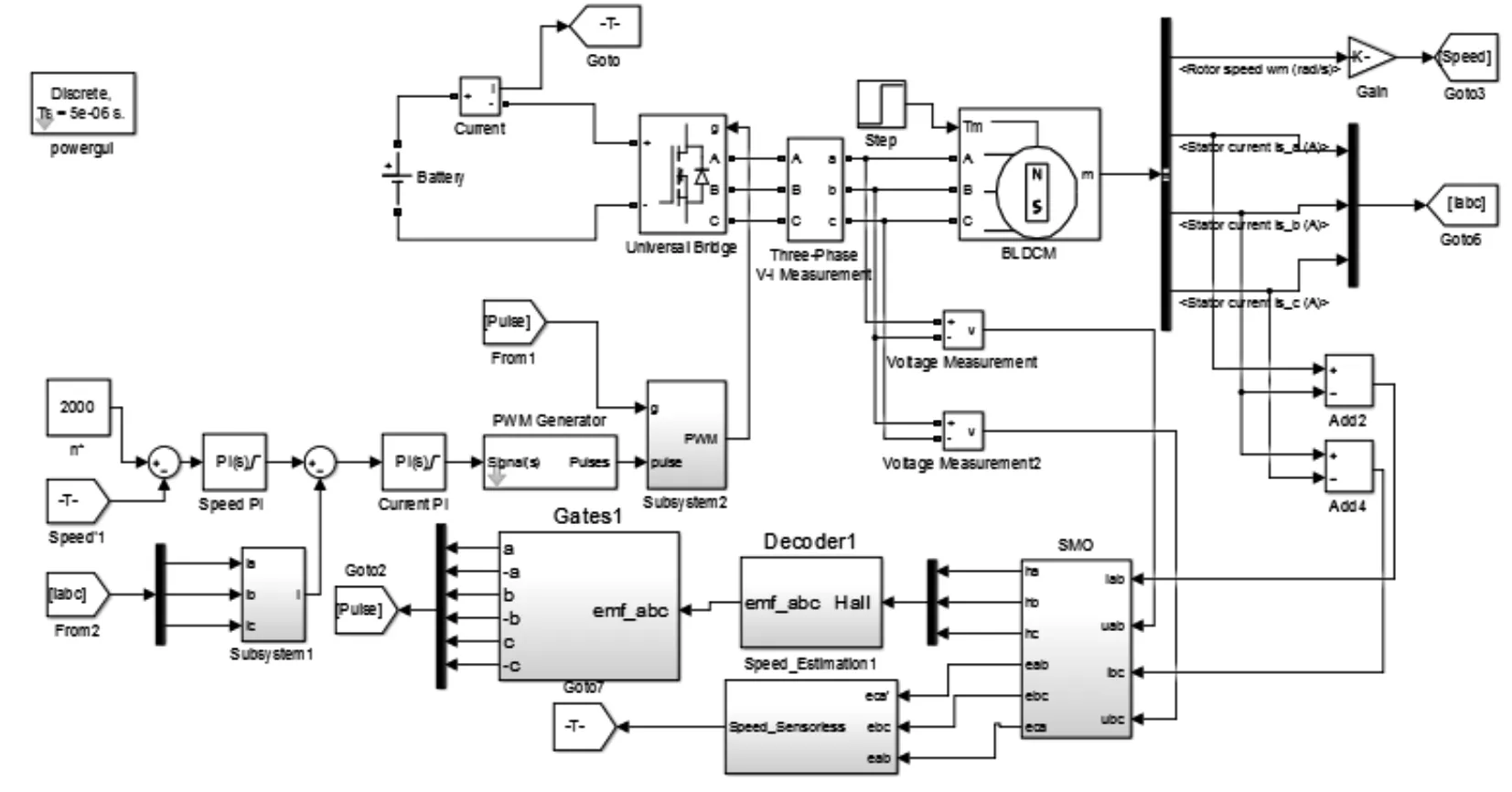
图4 无刷直流电机无位置传感器仿真图
图5为空载时不同α值下观测得到的线反电动势值仿真结果。仿真时间为0.1s。
可以看出,随着α取值的增大,观测得到的线反电动势比较平滑,基本没有抖振现象,观测精度高。
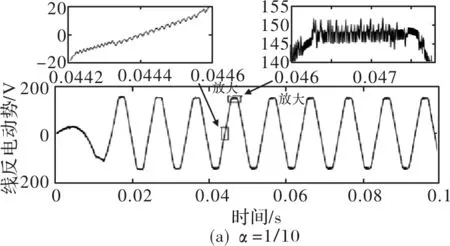
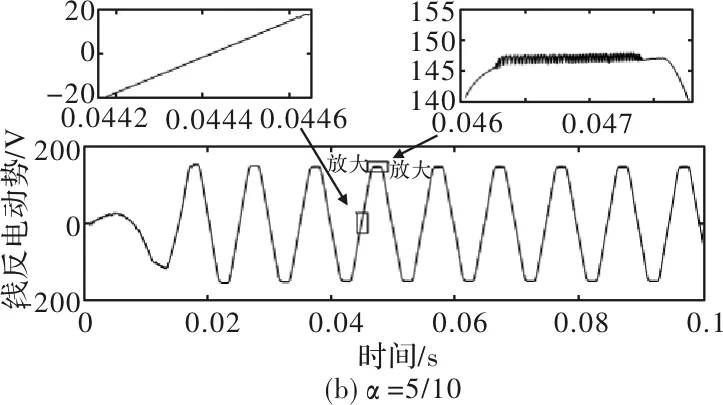
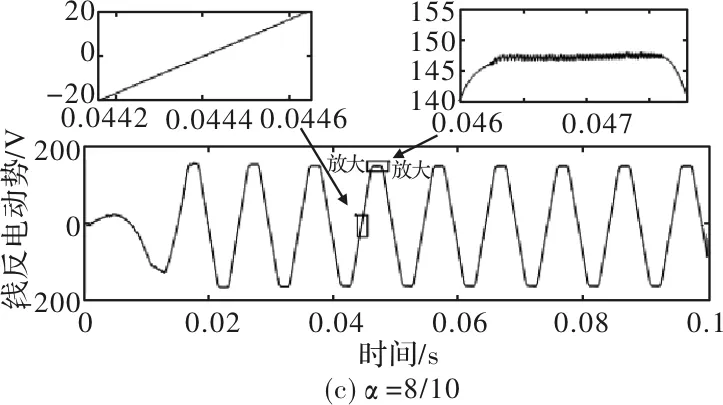
图5 不同α取值下估算线反电势波形
图6和图7分别为传统滑模观测器和基于幂次趋近律的滑模观测器无刷直流电机观测的线反电动势波形和相电流波形。其中α=8/10,设定仿真时间为0.3s,在0.15s时施加4Nm的负载转矩。
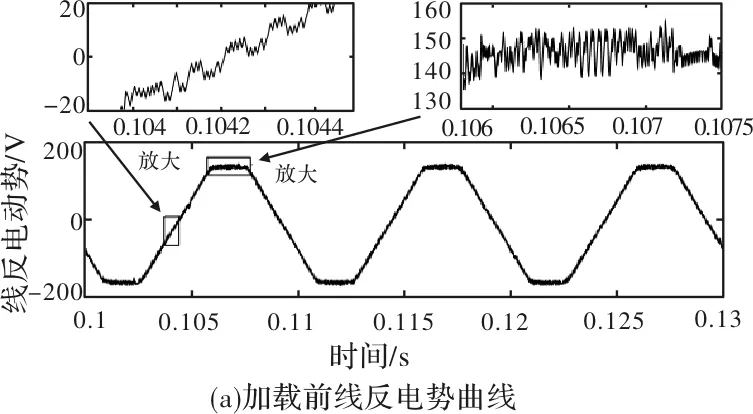
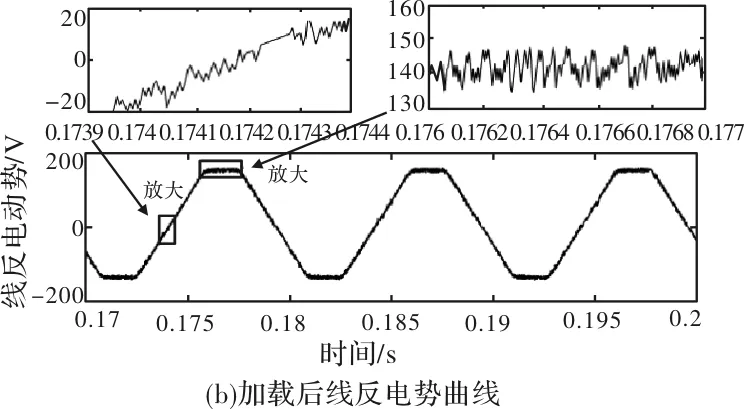
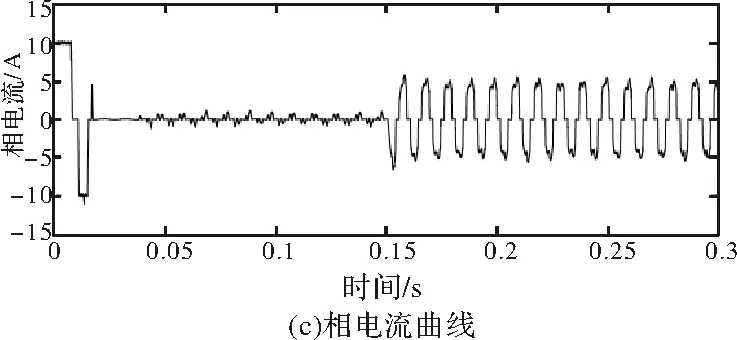
图6 传统滑模观测器线反电势曲线和相电流曲线
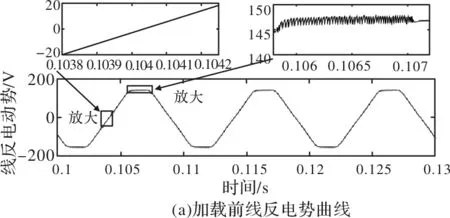
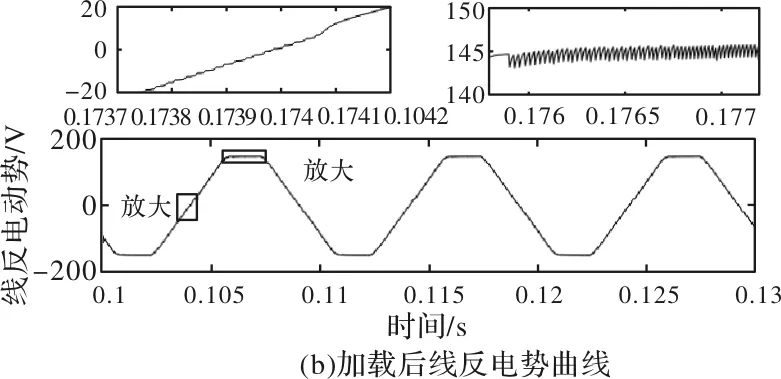
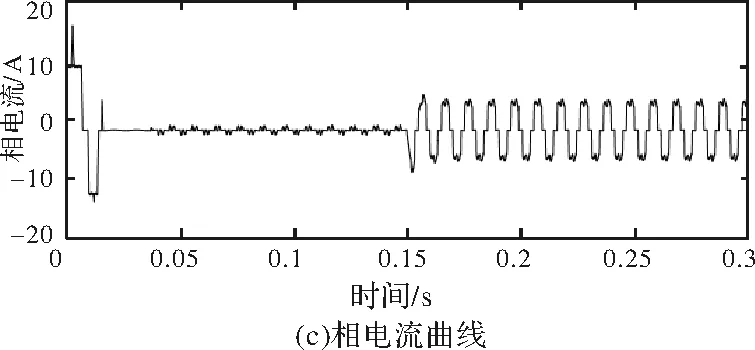
图7 幂次趋近律滑模观测器线反电势曲线和相电流曲线
可以看出,采用传统滑模观测器时,无论在加载前后,观测得到的线反电动势都有比较严重的抖振现象,从而带来估计的换相信号与实际的霍尔信号有较大的偏差。而采用幂次趋近律的滑模观测器观测的线反电动势比较平滑,几乎消除了抖振。同时,采用本文提出的基于幂次趋近律的滑模观测器得到的电流波形比较平稳,说明稳态性能比传统滑模观测器要好。
4 实验验证
为了进一步验证本文所提出的方法的有效性,搭建了基于dSPACE的半实物仿真平台,主要包括dSPACE主控板、变频器、电压电流采样电路等。
图8和图9为在额定转速下,分别采用两种控制方法得到的转速波形和线反电动势波形。
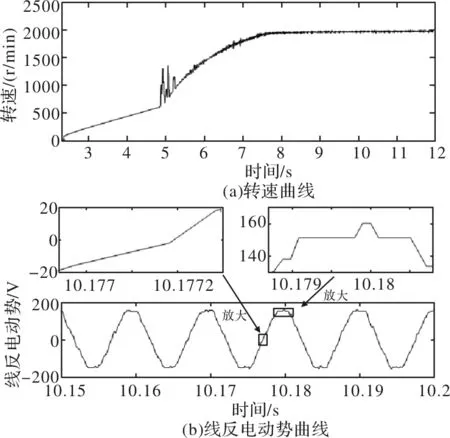
图8 传统滑模观测器空载转速曲线和线反电势曲线
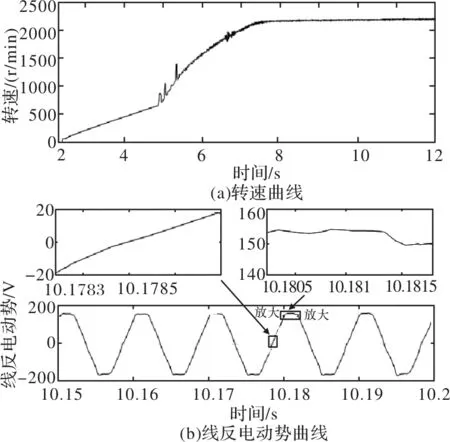
图9 幂次趋近律滑模观测器空载转速曲线和线反动势曲线
由以上两组图分析可得,采用传统滑模观测器估算出的转速波形有比较大的波动现象,并且由三段式起动切入无位置算法时有比较大的转速跳变。但是基于幂次趋近律的滑模观测器估算出的转速切入无位置算法时转速跳变较小,并且转速波形比较平滑。同时,采用本文提出的滑模观测器能够获得较好的线反电动势估计值,明显比传统的滑模观测器具有更好的观测效果,几乎消除了抖振。
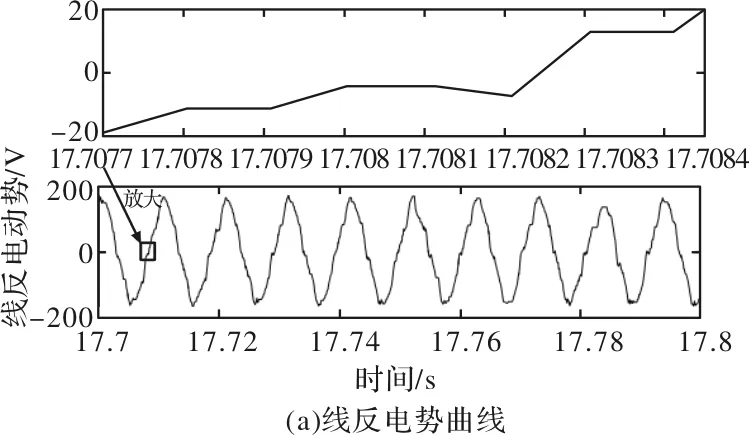
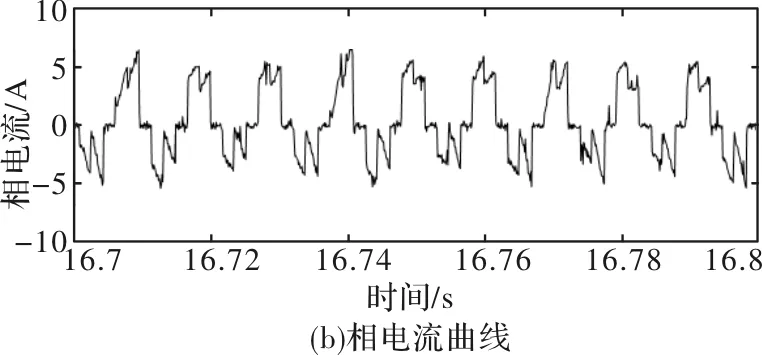
图10 传统滑模观测器加载时线反电势曲线和相电流曲线
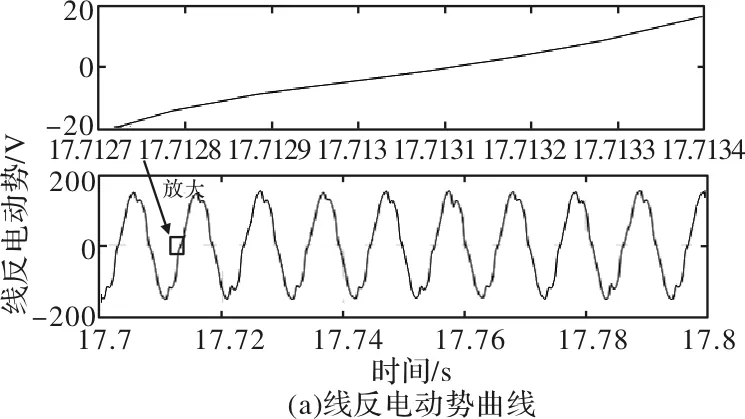
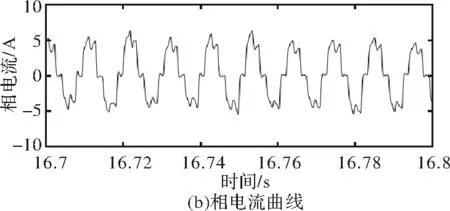
图11 幂次趋近律滑模观测器线反电势和相电流曲线
图10(a)、图11(a)分别为传统滑模观测器和基于幂次趋近律的滑模观测器在切入负载后观测得到的线反电动势波形。可以看出,加入负载后,传统滑模观测器得到的线反电动势波形畸变比较严重;而采用幂次趋近律的滑模观测器在加入负载后观测得到的线反电动势波形较好,在换相点处波形平滑,因此比传统滑模观测器具有更高的稳态精度。
图10(b)和图11(b)为采用两种控制算法时,加入负载后得到的相电流波形。可以看出,基于幂次趋近律的滑模观测器无位置控制系统得到的相电流比较平滑,运行稳定;而传统滑模观测器下的无位置控制系统的相电流有明显的波动现象。
5 结 论
针对传统滑模观测器的抖振问题,本文提出一种利用幂次趋近律来代替等速趋近律的滑模观测器,并讨论了幂次趋近律指数α的取值对系统的影响。通过仿真和实验,本文得出以下结论:
(1)指数α(0<α<1)取值越大,系统的稳定性越好,观测得到的线反电动势就越平滑。
(2)基于幂次趋近律的滑模观测器削弱了传统滑模观测器的抖振现象,保证了换相信号的正确性。
(3)将本文提出的控制策略应用到无刷直流电机无传感器算法中,具有更好的稳态精度和控制性能。