基于LuGre模型的伺服系统摩擦补偿策略研究
2019-06-26叶超崔宁豪马正雷林德银王群京
叶超,崔宁豪,马正雷,林德银,王群京
(1.中国电子科技集团公司 第三十八研究所,合肥230088;2.安徽大学 高节能电机及控制技术国家地方联合实验室,合肥230601;3.上海鹰觉科技有限公司,上海200082;4.安徽大学 教育部电能质量工程研究中心,合肥230601)
0 引 言
在高精度转台伺服系统运行过程中,摩擦会导致系统出现跟踪误、极限环和粘滞滑动等现象,从而降低系统的低速性能[1]。基于模型已知的摩擦补偿,因为其具有可预见性且响应速度快,基于模型的摩擦补偿已经成为一种重要的摩擦补偿策略。为了减少摩擦对于转台伺服系统低速性能的影响,必须建立接近真实摩擦情况的摩擦模型,需要对模型的参数进行离线辨识。
针对摩擦的非线性因素建模及补偿是国内外的研究热点。1995年,C.Canudas De Wit等人提出了LuGre摩擦模型[2]。这是一种比较完善的能够精确地阐述摩擦的各种动静态特性的模型,该模型用两个摩擦接触面之间的弹性鬃毛形变的平均量来表示摩擦的动态行为。LuGre模型还吸收了Stribeck模型对Stribeck效应的描述,在解决零速附近强非线性的的问题上使用了Stribeck模型,精确地描述了摩擦系统的静态特性。在对模型的动静态参数辨识及补偿时,利用伺服系统输出的角位移(或角加速度)和输出的控制力矩直接进行参数辨识,将控制力矩作为目标逼近值,继而辨识出两个动态参数[3]。但是其在辨识过程中没有使用PID控制器,导致其在控制器稳态震荡环参数辨识结果不够准确。文献[4]提出使用双观测器来实现系统的自适应摩擦补偿,然而双观测器的方法加大了计算难度。文献[5]通过精确测量转台系统摩擦阶段的角位移和速度值,采用频域辨识的方法来获得系统的动态参数。
本文对转台伺服系统实验测得得到多组迅速运动下的稳态误差,并由此推导出摩擦力矩与速度的关系;再采用遗传算法进行静态参数辨识,由系统的滑前位移曲线计算得到动态参数;得到转台伺服系统的LuGre模型。将该模型的预测速度作为前馈补偿,对速度进行补偿。仿真结果证明加入前馈补偿之后伺服系统的速度跟踪精度提高,本文提出的建模方法和前馈补偿策略是有效的。
1 LuGre摩擦力模型
如果不考虑风扰、齿隙等其他扰动因素[6],伺服系统的动力学方程为
(1)
式中,D和J为折算到电机轴上的等效阻尼系数和转动惯量;w和θ为电机轴上的转速和角度;u为控制量;F为折算到电机轴上的负载摩擦力矩;T1为折算到电机轴上的负载扭矩。本文采用的是LuGre摩擦模型,负载上的摩擦力矩为
(2)
g(w1)=MC+(MS-MC)e-(w1/ws)2
(3)
(4)
2 LuGre模型参数辨识
代入式(3)、式(4)可得:
(5)
(6)
将待辨识的参数向量为个体,那么遗传算法[8]中每一步迭代得到的辨识值为

取目标函数为
使用转台伺服系统,做匀速运动取51组速度指令信号,遗传算法取种群200,最大迭代次数21000,参数搜索范围Ms∈[0,1],mc∈[0,1],ws∈[0,0.1],σ2∈[0,0.1]。
将遗传算法所得到的摩擦力矩与实际摩擦力矩比较,得到目标函数值。目标函数最大值(如图1所示),辨识结果如图2所示,辨识的参数值如表1所示。
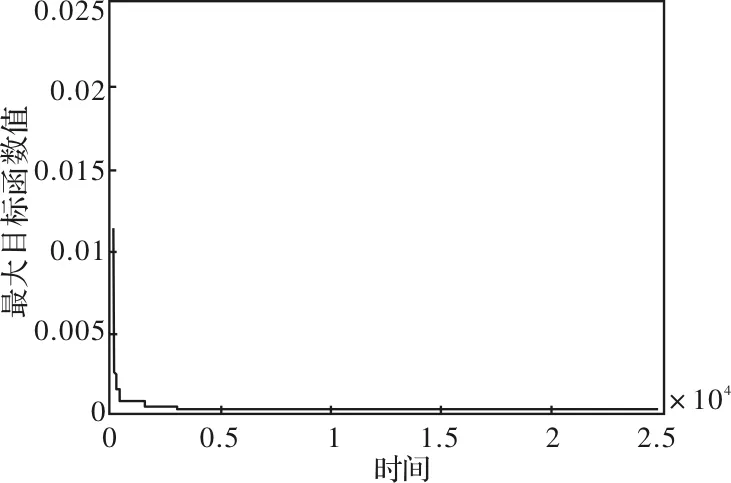
图1 最大目标函数值
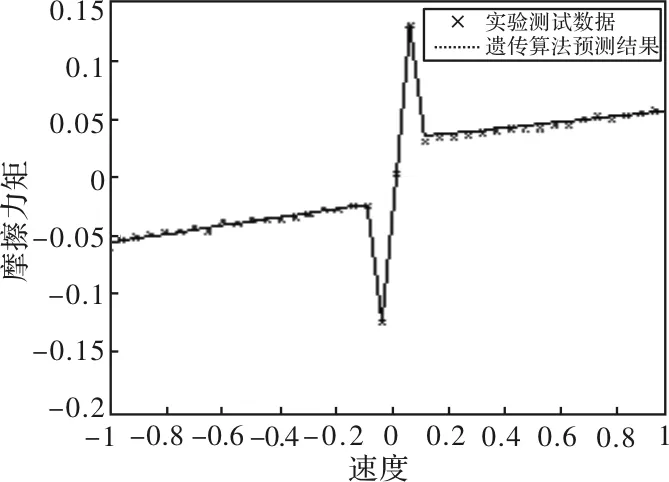
图2 辨识结果
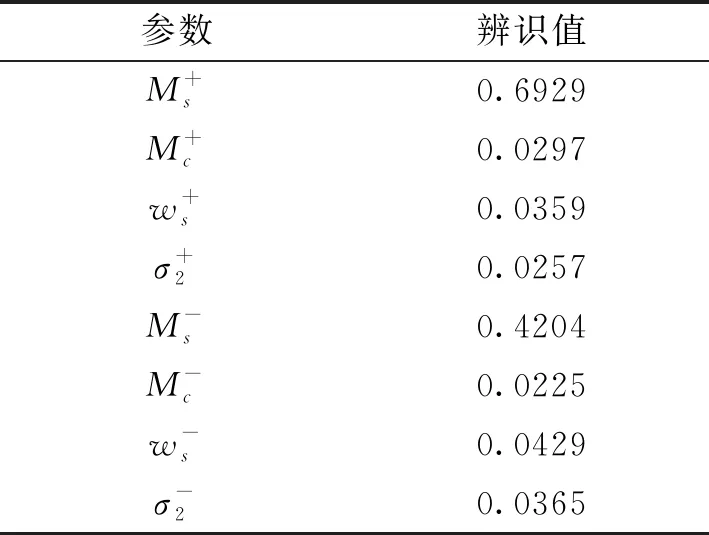
表1 参数辨识结果

3 转台伺服系统的组成
实验平台为单轴结构的转台伺服系统。转台伺服系统的硬件结构主要由转台、伺服电机及其驱动器、PWM转模拟电压模块、STM32控制器以及上位机,转台伺服系统的硬件结构框图如图3所示,硬件实物图如图4所示。
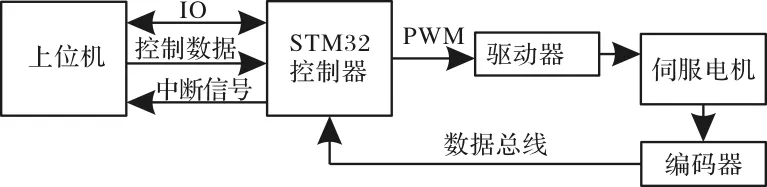
图3 转台伺服系统硬件框图

图4 实验平台
4 基于LuGre模型的Simulink仿真
本文使用前馈补偿控制策略,将伺服系统含摩擦扰动的速度量作为前馈补偿给速度的指令信号中,经过PID调节稳定系统的控制力矩,从而做到系统速度的稳定控制,使用仿真技术用来验证本文所建模型的准确性、补偿策略的有效性。仿真中伺服系统的参数J=0.5kg.m2,D=0.3 Nms/rad。为了比较,本文分别使用带有速度前馈补偿的PID控制和不带补偿的PID控制[10]。
用s函数构建LuGre摩擦模型模块,该s函数中的输入个数是1、输出个数为3、离散状态变量个数为3。s函数搭建的LuGre仿真模型如图5所示,伺服系统前馈补偿仿真如图6所示。
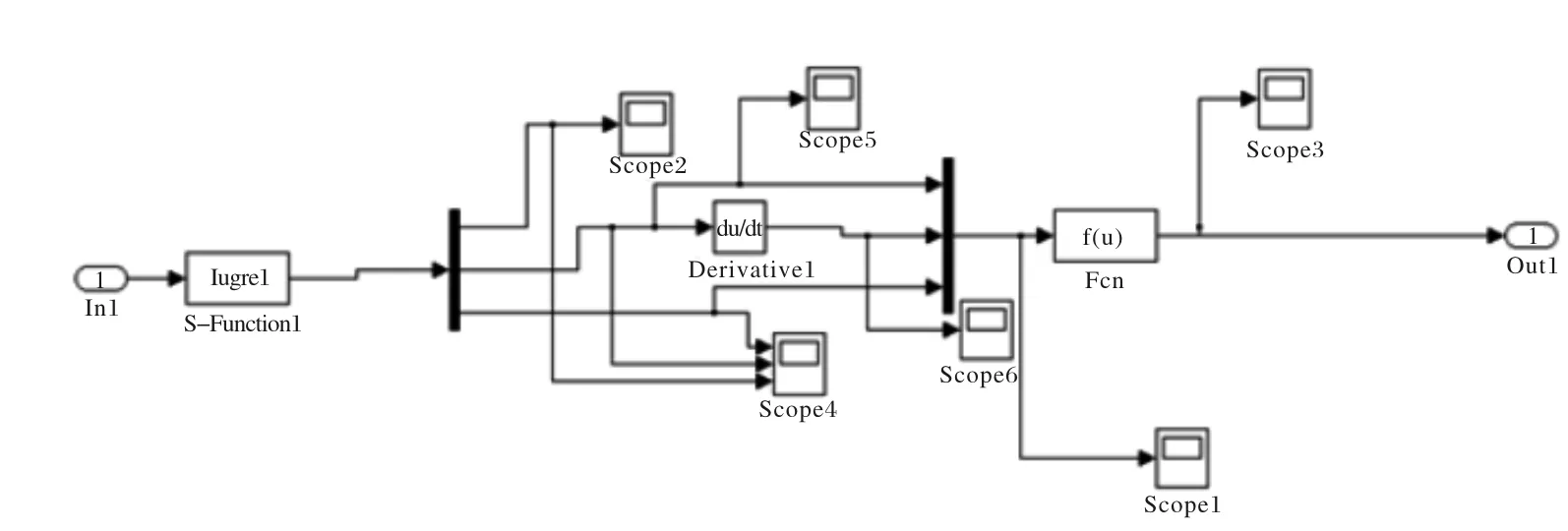
图5 s函数搭建的LuGre仿真子模型
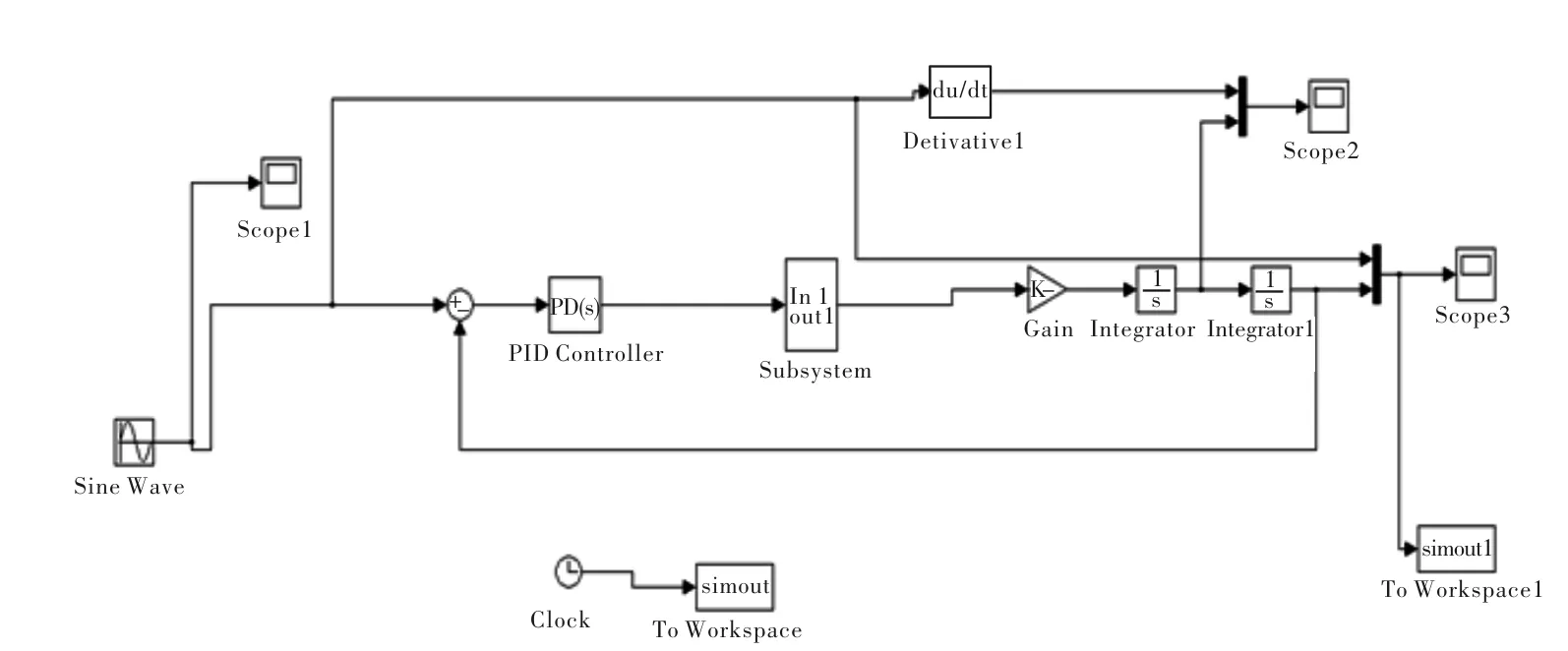
图6 基于LuGre模型的伺服系统前馈补偿仿真模型

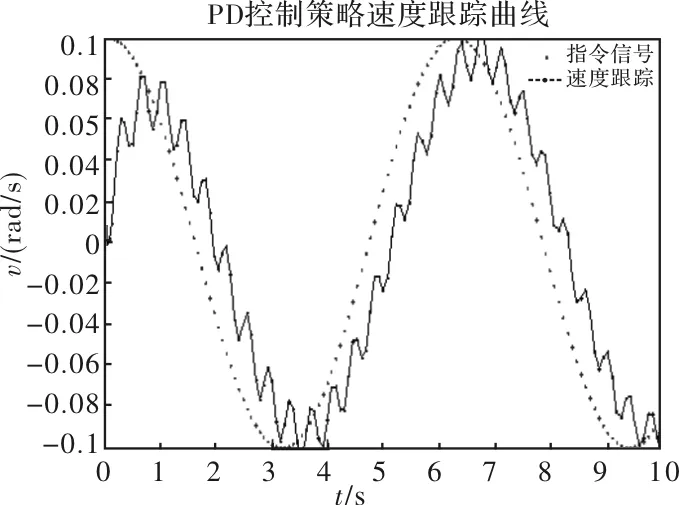
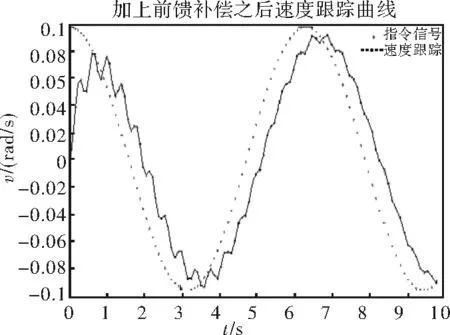
图7 没有补偿的速度跟踪曲线和前馈补偿的速度跟踪曲线
从仿真结果可以发现,当给伺服系统一个参考指令信号θref=0.1*sint时,无前馈速度补偿,电机的跟踪速度发生较大的波动,稳态跟踪误差较大。在未加上补偿之前,速度跟踪误差平均值约为0.002,而加上补偿之后速度跟踪误差平均值为0.0015。
5 结 语
利用摩擦力LuGre模型能很好地诠释摩擦力的动静态特性,本文设计LuGre模型辨识实验,使用遗传算法辨识模型的参数;并用S函数搭建LuGre模型的Simulink模块,构建前馈补偿器。仿真结果表明,本文使用的基于LuGre摩擦模型的伺服系统前馈补偿策略能很好的提高伺服系统的跟踪精度。