基于多源数据融合的高精细实景三维建模技术
2019-06-06张小宏马立华陈丰田韦树刚
张小宏,马立华,陈丰田,韦树刚,王 娜
(1. 青海省地质测绘地理信息院,青海 西宁 810012;2.青海省高原测绘地理信息新技术重点实验室,青海 西宁 810012)
利用无人机搭载多镜头传感器进行倾斜摄影并快速生成实景三维模型是近几年航空摄影测量行业的技术延伸,也是相关三维建模技术领域中的一项革命性突破。但是由于无人机所采集到的数据源与三维建模软件解算方面的相辅关系,对被测物相对较小、较复杂而且面积较大的微地貌而言,常规的数据获取方式及建模方法最终生成的模型效果不太理想。
青海省的油气输送管道分布地域广、拓扑结构复杂,并且涵盖多种地貌特征。在管道输送途中,分布着多种类型的场站、阀室等重要关键点,并且场站内除了厂房以外,附着在地面上的大小管道、阀门错综复杂。针对这类情况,利用无人机搭载多镜头倾斜摄影设备完成数据采集,并且高效地建立达到cm级的三维实景模型,在技术方法上还有待于进一步探索。
本文依托青海省高原测绘地理信息新技术重点实验室,对分布在青海省内的200余处油气管线关键点进行高精细模型的建立,作为管线监控系统的基础数据,探索出一种创新的数据源采集方法和多源数据融合的建模技术,并将这种“高精细、高效率、低成本”的三维模型建立方法应用于实际生产当中。
1 倾斜摄影技术
倾斜摄影技术是国际地理信息领域近年发展起来的一项高新技术,其克服传统的航空摄影技术只能从单一角度拍摄的局限性,通过对地物进行多角度拍摄,可获取同一地物的多幅倾斜影像。
相对于正射影像,倾斜影像能让用户从多个角度观察地物,更加真实地反映地物的实际情况,还能直接基于影像进行各种量测,如高度、长度、面积及实际坐标等。因此,倾斜影像极大的弥补了基于正射影像的应用的不足,为用户提供更丰富的地理信息,更友好体验,如图1所示。

图1 左为正射影像,右为倾斜影像
2 作业流程
2.1 数据采集
无人机倾斜摄影测量系统由4大部分组成:第一部分为飞行平台,采用多旋翼无人机为传感器搭载平台;第二部分为传感器设备,其中包括高分辨率五拼相机模块、高分辨率单相机模块; 第三部分为飞控平台,包括航线设计、飞行控制平台,地面监控系统等;第四部分为操作人员,包括飞行器操控人员、飞控辅助人和地面指挥人员。
2.2 内业处理
本次三维建模软件采用Smart3D ContextCapture,它是一款全自动三维建模软件。它可以利用无人机或其它方式采集到的影像数据生成具有高分辨率的真实三维模型,生成的三维模型效果取决于采集到的数据源是否符合软件要求。在生产过程中整个处理过程相对智能化,数据处理人员在具体工作时只需将所采集到的数码照片按照一定的要求将数据导入到程序中,另外加入几项必要数据,如焦距、传感器尺寸、控制点等就能完成实景建模工程建立。
2.3 工艺流程
数据采集及内业处理是本文中的两大关键步骤,其中的技术创新点是本文探索的重点。工艺流程及项目实施过程如图2所示。

图2 工艺流程
3 数据分析与技术改进
3.1 传统采集方式及三维建模效果
随着倾斜摄影技术的逐渐成熟,其在矿山、村庄、建筑物群等大面积测量中得到广泛应用,对于宏观地貌的处理,在精度要求不高的条件下倾斜摄影技术能达到不错的效果,但对于微地貌、细小的地物,尤其是大面积错综复杂的细小物体得不到很好的表现,例如大面积覆盖在地面上直径在10~20 cm左右的管道、阀门等;如果单个对其进行影像获取再进行逐个建模、数据合并,在精度的统一及工作效率上都得不到保证。传统的数据采集方式是采用自主航线飞行,这种方式是飞行器通过地面站控制,搭载多镜头倾斜摄影系统进行航线飞行,是全自主的智能航线飞行。它首先在地面站软件中根据被摄对像的范围及精度要求设置飞行航线,飞行平台根据航线参数自动计算出航高、重叠、分辨率等参数指标。飞行器在空中作业飞行时在同一曝光点上获取不同角度的多张照片,并且每个曝光点上的前后关系符合倾斜摄影航向及旁向重叠度的要求。
特点:飞行器较大,载荷能力强,搭载的传感器在每个曝光点同时可以完成5张照片的拍摄,作业飞行时单架次飞行面积相对较大、航线自动生成、飞行中时刻由GPS精准定位导航、飞行效率高、影像重叠度良好,而且抗风性强,采集效率高。
缺点:由于自主航线飞行,航高和拍摄角度无法灵活掌握、无法满足超低空飞行,分辨率无法有效提高;虽然同时有5张不同角度的影像,但覆盖面还是不够灵活,对地面上微小附着物及遮挡的地物无法获取影像。最终采集到的影像经过后期解算,生成的模型在细节方面扭曲变形,达不到理想效果,如图3所示。
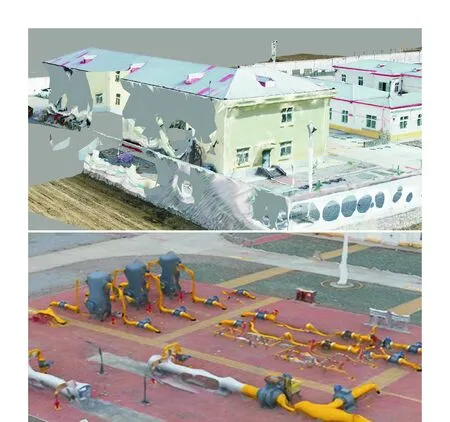
图3 传统采集方法建模效果
3.2 多源数据融合精细化三维建模
多源数据融合是采用多种方式进行数据采集合并处理的方法。此次为了达到“高精细、高效率、低成本”的特点,针对200多处大型场站的精细化建模是本文的重点。所涉及到的场站面积较大,建筑物及管道错综复杂,要达到既能提高效率又能使微地貌得到精细化建模,就要利用多种方式融合的方式进行采集。
采用“高空大面积航线法”、“低空手动叠加法”、“局部针对性环绕法”采集等方法,并且根据被测对象的不同采用“环内环”、“上下环”等不同采集模式,甚至有时要进行必要的地面手动拍摄。最后将这几种不同的数据在软件中进行匹配和融合,达到精细化三维实景模型预期的目标。采集方式如图4所示。
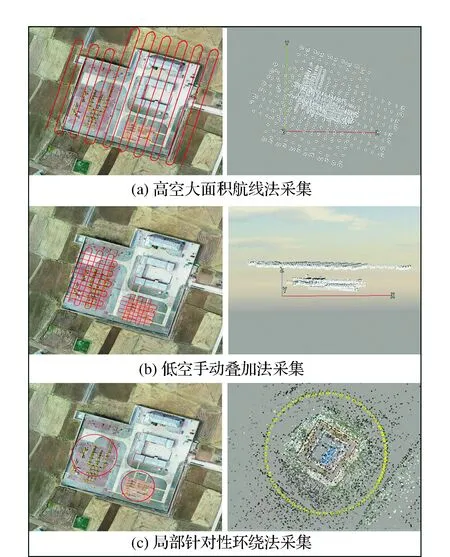
图4 多源数据采集
此方法利用了小型多旋翼无人机搭载高清相机完成,其目的是最大地降低飞行高度,灵活捕捉被摄物体的各个面。飞行高度可降低在离地面10 m以下,必要时贴近被摄物体3 m左右进行飞行采集。Smart3D ContextCapture实景三维处理软件为了更好地进行空三解算,需要符合软件算法要求的影像数据,因此在照片数据的采集工作上无论采用什么方法均需保证影像的重叠度和连续性。
3.3 内业数据处理
采用以上不同的采集方法获取的影像数据,如何在Smart3D ContextCapture中进行融合处理也是本次探索的关键。本次油气管线项目采集到的影像共有3种以上数据源,分别是多旋翼无人机搭载5拼相机进行高空航线飞行的数据;小型四旋翼无人机搭载单镜头像机超低空飞行数据;以及手动超低空环绕飞行数据等等。
1)空三解算。在数据处理流程上,把以上几种方式采集到的数据进行分类,并导入到后处理软件,保持文件夹的路径为非中文路径(中文路径会在软件运行中出现识别错误)。在工程准备完成后提交空中三角测量,软件会根据数据源提取大量特征点,并采用多视角匹配同名点,进行自由网平差,平差完成后可以反向解算出图片的空间位置和姿态角度,从而确定图片间的关系。
通常在ContextCapture中运算大数据量时,由于航片重叠度、清晰度以及数据源等问题,空三加密有可能会失败或部分失败,主要表现在航带分层、加密点漂移、相对位置不正确等。多个架次的多源数据融合在一起进行三维建模时,由于不同架次、不同航高、不同角度、不同设备等多种不同数据源,空三加密有可能无法保证。这个时候就需分架次进行解算,创建多个Block,分别进行空三加密运算。这时,如果数据有分层现象可以将影像组件构造模式改为多步后再进行一次空三处理。如果空三加密点相对位置不正确或者漂移,不是中心区域,可在生成模型的时候划除在范围外,若是中心区域可以删除一些质量较差、姿态较差的图片,完成后再做一次空三处理。
分别空三加密完成后,最后将不同数据源的几个Block的数据融合在一个Block中输入分开解算好的航片位置与姿态信息,再进行一次空三加密。这样就能解决不同方式、多源数据融合难的问题。如图5为空三解算工程。
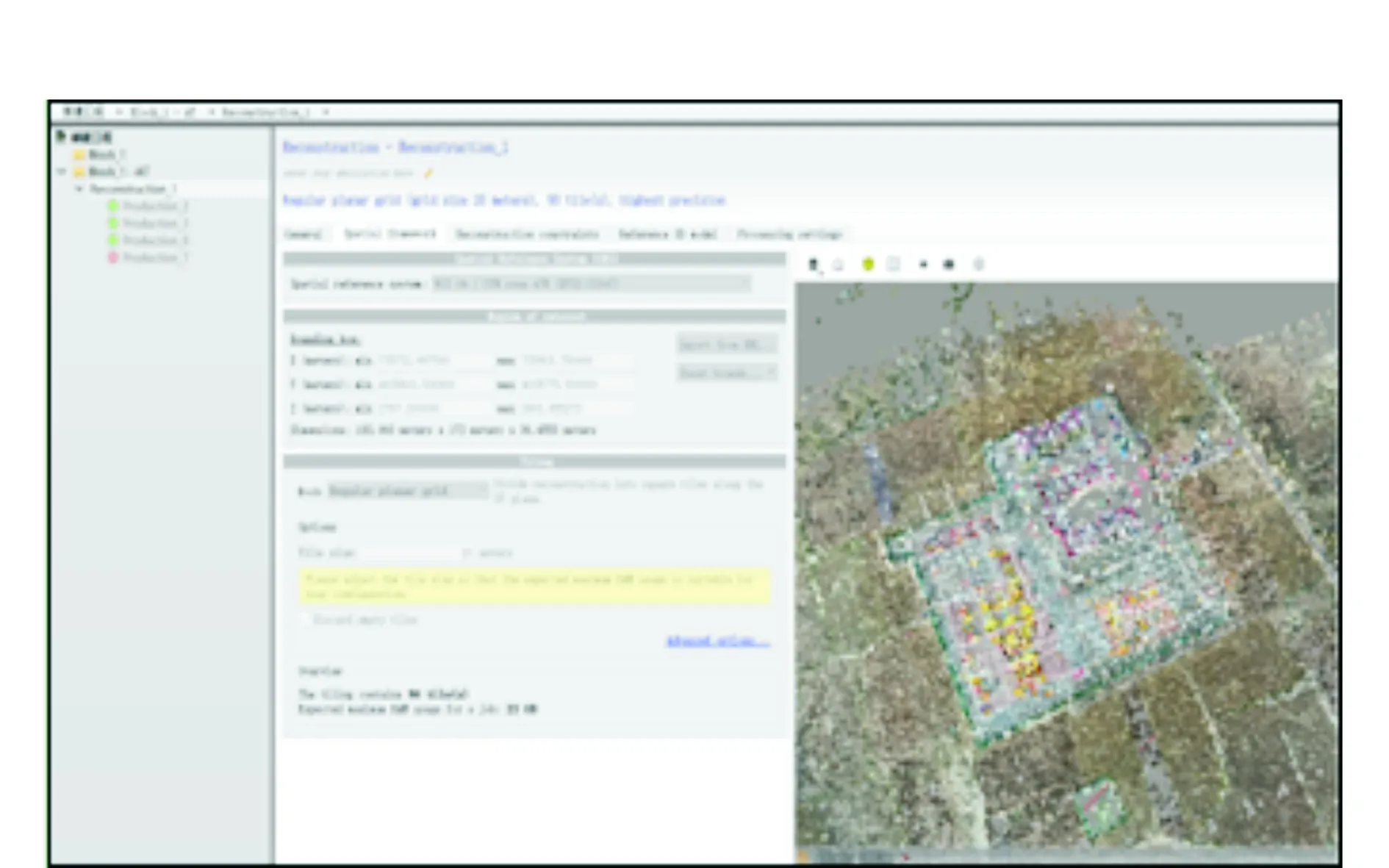
图5 空三解算工程
2)加入控制点。在多源数据融合空三加密之后,将控制点坐标编辑成特定格式的TXT文本导入工程中,选择相应的坐标系(特定格式:第一列为点号,第二列为x坐标,第三列为y坐标,第四列为z坐标,中间用一个空格隔开),这样可以很快找到控制点的大概位置再对照刺点片进行微调,在加入全部控制点后再进行一次空三加密过程,最终完成控制网平差。
3)模型建立贴图。多源融合数据在Smart3D软件中通过空中三角测量计算出不规则三角网TIN,并且生成无纹理的白模,再通过三维模型的形状位置从航片里面选取对应的纹理进行贴合,最后输出纹理逼真的实景三维模型。如果输出模型的时候单个瓦片数据量大于电脑内存,则建议将模型切分为多个瓦片运行,这样可以提高电脑运行效率,并且便于编辑瓦片、更新数据。用Smart3D软件完成模型数据后,导出OBJ、OSGB和XML文件,再利用3DMAX、CoModeler等软件进行编辑,对一些效果不好的瓦片修改完善,修改完成后将OBJ和OSGB文件导入到Smart3D中重新融合输出,便可以完成一个效果较好的实景三维的建设。如图6为多源数据融合后的建模效果,模型层次分明,微地貌精细度处理效果良好。
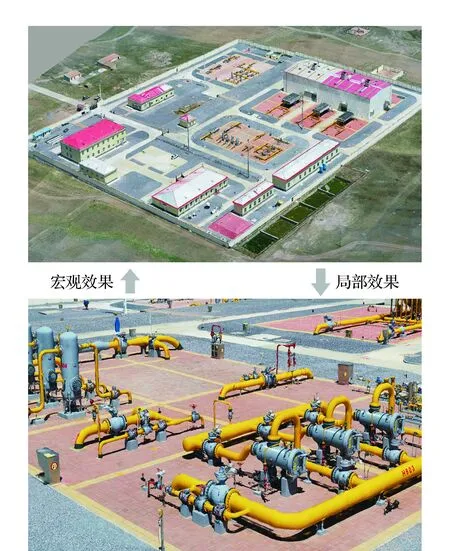
图6 多源数据融合后的建模效果
4 结束语
无人机倾斜摄影及实景三维建模技术已得到广泛应用,但由于该技术采用自动化建模方式,对于细节方面的解算还存在着一些不足,也是软件无法解决的问题,本质是对数据源的高标准要求。例如:建筑物稠密的地区、环境复杂的工厂、附着于地面的微地貌等,要想提高精细度,就需要在数据源获取方式上采用特殊的方法,并且在后期数据处理上采用不同方法。因此,采用多种采集方法相结合的模式,必要时将三维激光扫描仪获取的点云数据作为高精度拟合数据源,最终生产出高精细的实景三维模型。
