北斗GEO卫星载波相位单差观测值的周期性分析
2019-06-06邓兴升
周 韬,邓兴升
(长沙理工大学 交通运输工程学院, 湖南 长沙 410114)
北斗卫星导航系统简称北斗系统(BDS),北斗卫星主要包括三类卫星:地球静止轨道卫星(GEO)、倾斜地球轨道同步卫星(IGSO)、中圆轨道卫星(MEO),建设发展分为北斗一号、北斗二号和北斗三号3个阶段。北斗二号基本空间星座由 5 颗 GEO 卫星、5 颗 IGSO 卫星和 4颗 MEO 卫星组成,北斗三号基本空间星座由 3 颗 GEO 卫星、3 颗 IGSO 卫星和 24颗 MEO 卫星组成,并根据需要部署在轨备份卫星。北斗系统空间星座将从北斗二号逐步过渡到北斗三号,在全球范围内提供公开服务。截止2018-02-12,共发射29颗北斗导航卫星。随着北斗系统进一步发展与完善,北斗高精度定位逐渐成为研究热点。卫星信号穿过电离层、对流层到达接收机会受到一系列的干扰。在信号传播路径误差中,电离层延迟、对流层延迟可通过模型改正或者相对定位技术大幅度削弱。但是差分技术无法消除多路径误差,而且不同的观测环境,多路径误差很难用一个固定的模型加以改正,因此在局部范围的变形监测应用中,布设的基线较短,在消除其他强相关性误差后,多路径误差成为影响监测结果的主要误差源。
已有大量文献表明多路径效应与天线的位置、周边环境以及卫星几何结构有很大关系[1-2]。为减少多路径误差对测量精度的影响,实际应用中一般通过合理的选择观测位置,选用多路径抑制天线以及事后的数据处理等多种方式来减少多路径误差。当观测周期较长,而测站周围的环境保持不变时,观测卫星在测站上空做周期性运动,从而使得与卫星高度角具有极大相关性的多路径误差也同样具有周期性。文献[3]验证在变形监测中,观测点存在一定位移的情况下,多路径误差仍然具有相同的周期性。对于静止的接收机来说,由于卫星运动周期的重要性,卫星和接收机周围任何固定反射物的几何关系在约一个恒星周期后重复,利用这一特性,可以通过连续多天的同时段观测消除周期性系统误差,此即恒星日滤波[4-5]。文献[6]在常规恒星日滤波的基础上,提出一种顾及分段相似性的恒星日滤波优化算法。实验结果表明该算法能明显改善单历元定位的精度和可靠性,克服常规滤波方法存在的缺陷。文献[7]和[8]通过周期性重复解算、时间序列最大相关系数的计算,发现GPS高频单历元时间序列中包含的周期性系统误差的重复周期为86 153~86 165 s。文献[9]改进常规恒星日滤波算法,提出一种顾及分段相关性的恒星日滤波优化算法。结果表明该算法较常规算法在N,E,U 3个方向上的滤波效果各提高7.7%、5.0%、11.2%。利用恒星日滤波算法处理多路径误差,在不同的导航定位系统及不同的定位方式中皆有很大的应用。但是由于不同的导航定位系统间卫星星座上的差异,使得在计算多路径效应的重复周期上要区别对待。即使是同一个系统,如我国的北斗系统,它由三类卫星组成,因此在计算重复周期时三类卫星各不一样。
GNSS观测过程中,不仅受系统性误差的影响,还存在高频噪声,文献[10]用Vondrak滤波,经验分解(EMD)和小波3种方法处理多路径误差序列中的高频噪声,并用3种方法构建多路径误差修正模型进行恒星日滤波;文献[11]采用EMD及EMD与小波相结合来处理GPS/BDS变形监测中多路径误差,对高频噪声进行恒星日滤波,结果表明EMD方法可以很好地削弱GPS/BDS实时监测时间序列中的高频噪声,提高监测精度50%左右,而EMD与小波两者结合效果更好。
随着北斗卫星系统的进一步发展,国内外学者开展了许多关于北斗卫星定位多路径误差恒星日滤波处理算法的研究。文献[12]根据基线解算结果提取了测站的多路径误差时间序列,并通过最大相关性分析确定了多路径误差的周期,提出适应于北斗的恒星日滤波算法,实验结果表明北斗恒星日滤波算法消除部分周期误差,坐标时间序列的精度提高10%~20%。伪距定位或载波相位定位中,皆可以使用恒星日滤波削弱多路径误差影响。文献[13]探讨不同定位解算中的多路径误差消除策略,采用多路径误差实时改正后的单点定位精度相比原数据解算结果明显提高,基于北斗多路径误差周期的恒星日滤波算法消除部分周期误差,基线解算坐标时间序列的精度明显提高。
载波相位的恒星日滤波算法,坐标域恒星日滤波的多路径误差模型为可观测卫星多路径误差的综合,坐标序列噪声为所有卫星噪声的整体表现。因此,陈德忠、叶世榕等提出基于观测值域的双差残差多路径改正方法,相比常规的坐标域恒星日滤波算法,该方法在平面方向的精度可提高23%,高程方向的精度也有所提高[14]。北斗与GPS相比,星座系统有所不同,这使处理与卫星轨道运行周期相关的多路径误差也不一样。文献[15]提出了一种基于单差的观测值域多路径误差滤波算法用于改善北斗短基线定位结果,该算法能有效改善每颗卫星观测数据中的周期性多路径误差。实验结果显示,该方法能有效提升定位精度,并且改善幅度大于传统的坐标值域恒星日滤波算法。为探讨北斗载波相位多路径误差在观测值域的特性,本文从观测值域研究载波相位站间单差观测值,分析讨论北斗卫星多路径误差周期性特点,采用相关系数法分析相邻恒星日的单差观测值,发现相邻恒星日单卫星站间单差观测值的周期性。
1 相位单差观测值
1.1 载波相位单差观测值
卫星导航定位的载波相位观测方程为
cVtR+cVts-Niλ-(Vion)i-(Vtrop)i+δm+ε.
(1)


(2)
对式(2)中的两项差分,即得到单卫星的站间差分观测值:
(3)
令

Vtij(t1)=Vtj(t1)-Vti(t1);

εij=εj-εi;
化简为
(4)
可知载波相位站间单差观测值消除卫星钟差,实际数据处理中,电离层延迟及对流层延迟误差得到削弱,在短基线处理中甚至可以忽略这两项误差的影响。针对短基线式(4)可进一步化简为
(5)
有接收机钟差及模糊度两个未知参数及多路径噪声和高频噪声,此时的单差受这几项误差及基线向量单差值的共同影响,本文对其周期性开展研究。
1.2 确定重复周期
针对北斗卫星重复周期与多路径误差的周期的关系,文献[10]利用连续多天时间序列的相关性,计算得到多路径误差的重复周期约为86 160 s,同时采用广播星历和精密星历法,计算得到卫星的轨道重复周期,对比发现两者大致相同,验证多路径误差与卫星轨道周期的高度相关性。北斗GEO卫星及IGSO卫星的轨道运行周期约为86 163 s,MEO卫星有所不同,北斗的MEO卫星7 d绕地球运行13圈,情况更为复杂,本文仅针对GEO卫星的观测数据进行讨论。
为确定精确的重复周期,采用测量数据处理中广泛应用的相关系数法,相关系数法用于考察两个数列的关联程度,对于两个数列A=[a1,a2,…,an]及B=[b1,b2,…,bn],数列A,B的相关系数定义为
(6)

2 相位单差观测值的周期性分析
为了研究载波相位单差观测值的周期特性,采集了HNCORS基准站HNHJ和HNLH两个测站在2016-08-07T00:00—2016-08-08T24:00全天共48 h的数据,设置采样间隔为1 s,观测值文件中包含有GPS卫星和BDS卫星以及GLONASS卫星三类卫星的数据,Rinex文件的版本为Rinex3.02。数据处理前,采用Rinex版本转换器将3.02版本的数据转换成2.01版本,再采用GNSS数据预处理软件TEQC通过删除GPS和GLONASS数据,从而提取出北斗卫星数据,数据剔除其命令格式为Teqc-G original.O>result1.O;Teqc-R result1.O>result2.O。经过以上TEQC处理后,观测值文件中的GPS卫星数据和GLONASS卫星数据被剔除了,result2.O文件中仅包含有北斗卫星的观测数据值。
为了提取载波相位观测值数据,采用MATLAB编写了相应的数据提取程序。O文件中主要包含头文件和观测值数据两部分,每部分有其固定的格式,按照其固定的格式读取观测值文件,然后将其写入到新的变量中。使用该程序提取HNHJ、HNLH基准站在2016-08-07T00:00—2016-08-08T00:00的B1载波相位观测值,选择C01为参考卫星,两天的载波相位历元观测值如图1和图2所示,其中图1为基准站HNHJ、图2为基准站HNLH在8月7日至8月8日全天卫星载波相位观测值对比(参考卫星C01),C01为地球同步轨道GEO卫星。

图1 HNHJ相位观测值对比图

图2 HNLH相位观测值对比图
由图1—图2可知,单卫星单站相邻两天的载波相位观测值在形态上具有极大相似性和周期性,分析原因,GEO卫星为地球同步轨道卫星,对于同一参考卫星,测站和该卫星的相对位置在前一天的某一时刻与后一天的同一时刻相近,在连续观测的情况下,整周模糊度保持不变,结合载波相位观测方程综合考虑,在两天的对应时刻,载波相位观测值受到的电离层延迟,对流层延迟在高度角相近的情况下相关性显著。载波相位多路径误差的大小相对观测值本身,是较小值,因此,虽然单卫星单站载波相位观测值是所有观测误差综合影响的结果,但由于卫星的周期性轨道运动,使得相邻卫星运行周期载波相位观测值具有明确的周期性。
进一步研究单卫星站间差分观测值,参考卫星仍然为C01,将提取的载波相位观测值按照历元对其进行差分,需要注意的是,接收机采集的数据可能存在缺失,因此必须按照历元对其进行插值,否则差分的结果就有误。处理的流程首先提取测站HNHJ,HNLH在8月7日和8月8日全天参考卫星为C01的全部载波相位观测值,然后在测站间对其每个单历元差分,图3为2016年8月7日和8月8日全天测站HNHJ与HNLH站间差分值对比图。
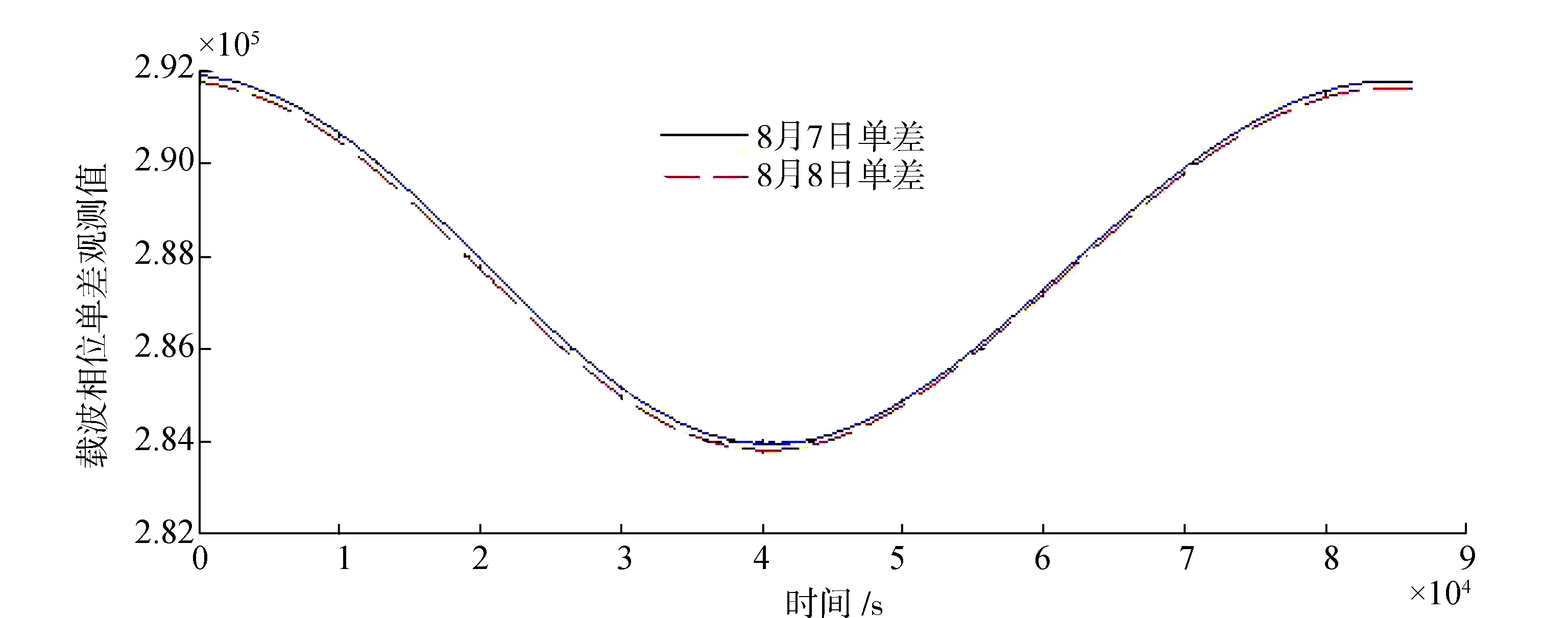
图3 测站HNHJ与HNLH站间差分值对比图
由图3可知,相邻两天的单卫星站间差分值具有明显的相关性,其形态高度一致,计算两数列的相关系数达到0.999 9。8月8日单差数据较8月7日单差数据有一定的偏移,但其趋势一致。结合载波相位单差观测方程可知,差分极大地消除和削弱了电离层延迟误差和对流层延迟误差,尽管单差模糊度和接收机钟差是未知数,但不影响其周期性特性。
通过多个周期的实验表明,GEO卫星的复现周期在10 s的范围内波动,而准确的复现周期需要通过最大相关性确定。为了获得载波相位单差观测值中的周期性误差,采用重心基准法消除同一历元中单差的公共部分(即扣除均值),得到重心基准意义下的各颗卫星站间单差残差值,对其中的高频噪音滤波后,可获得观测值域的单差载波周期性误差模型,采用恒星日滤波方法移去周期性误差将可望提高相位观测值的精度。
3 结 论
本文研究分析了北斗GEO卫星单站载波相位观测值及单卫星站间单差观测值的周期性,结果表明:
1)单卫星单站的载波相位观测值虽然是受各种误差综合影响,但由于相邻周期各类误差的相关性,单卫星单站载波相位观测值具有周期性。单卫星站间差分观测值消除卫星钟差,削弱电离层延迟误差及对流层延迟误差的影响,实验表明北斗GEO卫星相位单差观测值呈恒星日周期变化,周期时长差在10 s范围内波动,其精确周期可由最大相关系数法确定。
2)周期性误差的大小相对观测值本身而言是很小的值,采用重心基准法移去同一历元单差观测值中的公共部分,再滤波滤除高频噪音,即可提取单差观测值中的周期性误差。由于周期性误差与卫星周期性运动有很大关系,根据卫星的周期运动特性来改正周期性误差是可行的。
