无人机在1∶1 000地形图成果质量检查中的应用与精度分析
2019-06-06张灯军
张灯军,郭 军
(1.广东省地质局第七地质大队,广东 惠州 516000;2.广州海洋地质调查局 国土资源部海底矿产资源重点实验室,广东 广州 510760)
传统地形图成果质量检查通常采用人工野外实地查看方式,采取图面检查及特征点(坐标、高程、边长)检查等,费时费力且效率低下,往往导致漏查漏检,不能兼顾工作效率和检查成果质量;近年来无人机技术日趋成熟,其具有机动灵活、反应迅速、使用成本低、操作简便等优势,成为一种新型的具有独特优势的测量手段[1-3],越来越多地应用于基础地理信息测绘、应急测绘保障、工程变形监测、文化遗产保护、野生动植物保护、自然灾害监测与评估、数字城市建设、城市规划管理等各个领域[4-6]。若采用无人机航测方式可在较短时间内快速获取地面影像,经过必要的精细内业处理,生成高质量的数字正射影像,通过对已有成果图件进行叠加对比分析,可以快捷直观地检测出两者的差异,从而实现对已有成果图件非常精准的质量检查。本文以惠州市惠东县1∶1 000地形图测绘项目为例,详细阐述了外业数据获取及内业数据精细处理过程,最后对生产的1∶1 000地形图进行正射影像图叠加比较分析,识别与查找差异,实现对已有成果图件精准的质量检查。
1 前期准备
1.1 测区概况
测区位于惠东县稔平半岛的西北部,稔山镇盐灶背至亚婆角,总面积约11 km2,测区以丘陵为主,地势起伏多变,植被较为茂盛。本文选取测区内3 km2作为实验区,通过ArcGIS软件将生成的DOM影像与实测的地形图进行叠加分析,对地形地物和显著特征点的平面坐标进行逐一对比,检查分析DOM影像中的地形地物及显著特征点平面坐标与实测地形图采集的信息是否完全一致,查找差异,从而实现对成果质量的精细检查。
1.2 设备参数
本次实验选用北京朗天博泰科技有限公司生产的LT-150无人机,其采用双频GPS,载荷6 kg,续航时间12 h。搭载的数码相机为佳能5DMark2,2 110万像素,分辨率为5 616×3 744像素,相机镜头焦距为25 mm,影像地面分辨率为8 cm,像幅为5 617×3 742 pix,像元大小为6.42 μ。相机自重约810 g,配合云台搭载在LT-150无人机上采集影像。
1.3 无人机飞行设置
为保证本次无人机航拍质量,飞行前对无人机系统各种软硬件进行必要的检查,保证无人机系统处于最佳工作状态。选择晴朗无云天气,且风力较小的时段进行外业航拍作业。事先通过飞控软件选好航拍区域,设好像片地面分辨率、航向重叠度、旁向重叠度等参数,飞控软件系统会自动计算飞行航线,设置飞行高度约为250 m。
航飞后及时对质量进行检查,立体像对的航向重叠度不得小于60%,相邻航线的旁向重叠度不得小于30%;相邻像片航高差不得大于20 m,同一航线内航高差不得大于 30 m[7];航摄漏洞检查是检查全测区是否完全被立体像对所覆盖;影像应清晰,层次丰富,反差适中,色调柔和,可辨认细小地物。
1.4 外业像控点布设
外业像控主要包括两项:
1)通过地面布设像控点,将影像坐标系统和测图坐标系统联系起来。像控点的布设采用区域网布设,选刺执行《低空数字航空摄影测量外业规范(CH/Z 3004-2010)》航向方向按照4~6条基线,旁向方向按照每隔1~2条基线进行布设,能有效控制住成图范围;像控点的测量执行《全球定位系统实时动态测量(RTK)技术规范(CH/T2009-2010)》,采用RTK方式双参考站快速静态测量,本次在航拍区域均匀布设4组共12个平高点,所有像控点均采取喷漆方法在地面明显地方喷0.8 m×0.8 m红十字标志(见图1),每个像控点的重叠像片数量均不少于6张。
2)像控点平面及高程成果采用GPS RTK方法进行测量,测量前在附近已知控制点上进行校正,采用控制点测量模式进行测量,测量次数均为3次,采取3次平均值作为像控点最终坐标成果。

图1 像控点布设图
2 数据处理
2.1 空三加密
空三加密采用德国INPHO公司生产的INPHO全数字摄影测量系统[8-10],由摄影测量学家阿克曼教授主导研制,该软件具有独特的高精度、高效率、高智能化特点,在数字航空影像领域应用广泛,能够同时兼顾内业效率和产品质量。
空三加密包括像点连接、像控点量测、平差计算等过程。具体流程如下:①先检查外业控制点文件和相机文件输入正确性,确认无误后开始量测外控点;②放大物方标准方差权,消除粗差,逐步提高物方权重,直到探测出所有粗差;③利用优选权值进行平差处理[11-13]。
最终计算的空三加密精度为:Mxy=0.176 m,Mz=0.101 m,满足《中华人民共和国国家标准 1∶500、1∶ 1 000、1∶2 000 地形图航空摄影测量内业规范(GB/T 7930—2008)》的要求。
2.2 正射影像制作
基于空三加密成果及影像匹配生成数字表面模型(DSM),用于制作正射影像,利用空三获得的外方位元素及影像匹配获得的离散三维点,最后通过人机交互的方式,获得测区DSM,然后根据DSM制作正射影像(DOM)[14-15],具体流程如图2所示。

图2 DOM制作流程
3 试验结果分析
3.1 DOM提取点位精度与现场全站仪实测的比较
首先提取空三处理后的DOM典型地形地物特征点,如明显道路拐点、道路交叉点、房屋拐角等的坐标值,共计36个地物点;然后利用全站仪实测36个地物点的平面坐标值;最后同一个点位的航测成果和全站仪法实测结果进行对比分析,如表1所示,图3为点位误差分布。
从表1可知,X坐标较差最大为3.9 cm,计算出平均值为2.402 277 8 cm;Y坐标较差最大为3.8 cm,计算出平均值为1.908 333 cm;根据点位中误差计算公式,计算得出X方向点位中误差Mx=1.061 992 cm,Y方向的点位中误差My=1.073 357 cm,平面点位中误差Ms=1.509 941 cm。根据相关规范,本次试验精度分析结果完全满足明显地物测量成果坐标检查的要求。
3.2 正射影像图(DOM)与实测地形图图面对比检查
随机抽取部分正射影像图(DOM)与实测的地形图进行叠加比较分析,发现实测地形图主要存在以下几个问题:

表1 航测成果和全站仪法实测结果对比分析 cm

图3 点位误差分布图

图4 测图遗漏
1)测图遗漏问题。如图4所示,正射影像图(DOM)中呈现出一处简易棚房、多处独立坟墓、路灯及电线杆,而实测地形图中则没有,检测出实测地形图存在漏测现象。
2)测图错误问题。如图5所示,发现实测地形图存在旱地、水稻田及林地地类表示错误、范围边界错误,按照制图规范田地应当单独表示,而不能将水稻田、旱地等不同地物用统一符号表示。
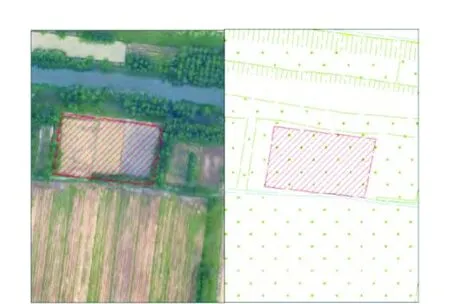
图5 测图错误
3)测图不合理问题。如图6所示,通过正射影像图(DOM)叠加地形图对比分析后,发现测区东南侧为河流,周边地形较为复杂,河流斜坡存在表达不合理问题,树木应单独表示,斜坡应通过等高线来表示,而不是简单地采用斜坡符号来表示。

图6 测图不合理
4 结束语
本文运用无人机技术获取高分辨率的地面影像,通过空三加密处理,统一坐标系统,最终生成正射影像图,通过与实测地形成果图进行叠加对比分析,快速发现并精准识别出实测成果坐标错误信息以及地形地物漏测错测及表达欠合理等问题,大大减轻了大面积测图外业成果检查的工作强度及工作量。同时对检查成果精度进行分析,试验结果表明平面坐标及高程坐标满足相关规范要求,证明利用无人机技术对大比例尺大面积地形测绘成果进行检查这一技术手段的可行性及可靠性。
