麻山药收获机振动松土装置的设计
2019-05-24曹少波冯晓静
邢 旭,秦 祯,曹少波,冯晓静
(河北农业大学 机电工程学院,河北 保定 071001)
0 引言
山药在我国种植广泛,主要产于河南、河北、山东、江苏、湖北、安徽、山西及福建等地[1]。目前,麻山药收获仍以人工为主,收获机械化水平较低,劳动强度大、费工费时及生产成本过高使其生产受到很大限制,严重影响了麻山药的规模化种植,影响种植者的经济收入和产业发展[2]。虽然已有部分地区采用开沟机收获麻山药,但只是用于挖沟,依旧需要人力参与挖掘、捡拾和摆放等作业,机械化程度相对较低[3]。因此,麻山药收获机械化对于提高工作效率减少劳动强度至关重要。麻山药收获机的振动松土作业是麻山药收获机工作的重要环节,振动松土装置是麻山药收获机的核心装置,其结构参数和运动参数对挖掘阻力、麻山药根茎损伤、人工出土劳动强度有较大影响。为此,设计了麻山药收获机振动松土装置,并进行了参数优化。
1 振动松土装置的结构与原理
1.1 振动松土装置的结构
麻山药收获机振动松土装置是该收获机的关键部分,直接影响麻山药收获机的损伤率[4]。振动松土装置主要包括机架、偏心轮、振动摆臂、麻山药拨土轮和振动松土铲,如图1所示。
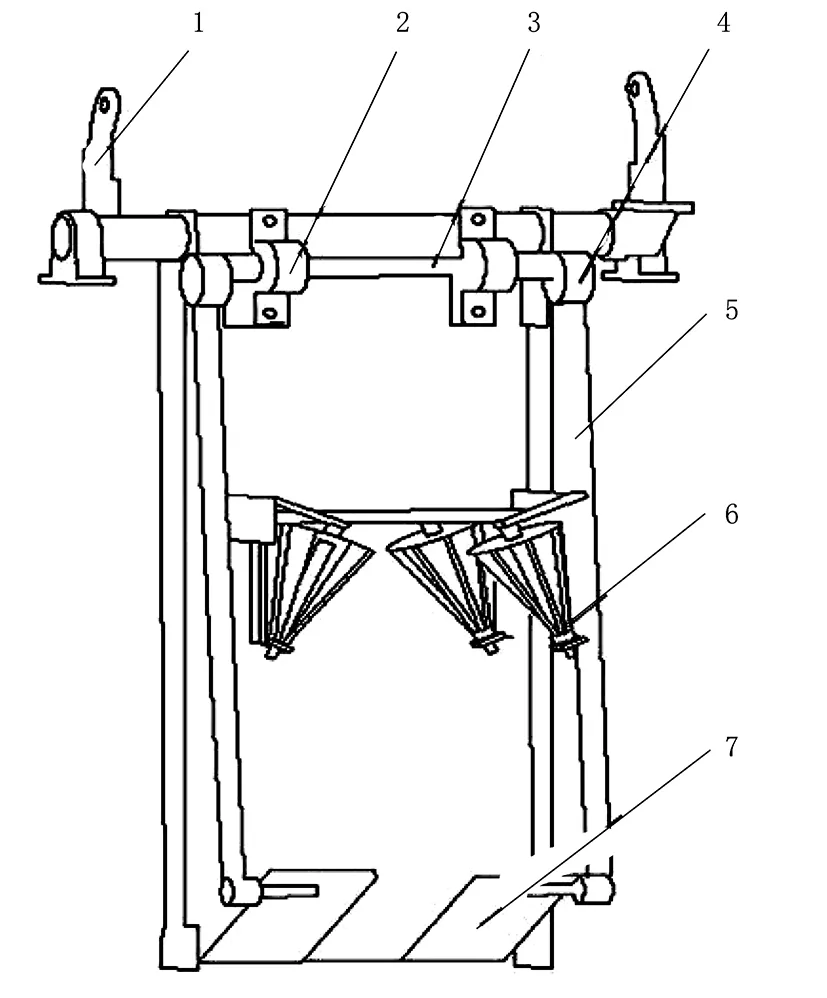
1.机架 2.从动链轮 3.动力传输轴 4.偏心轮 5.振动传递连杆 6.碎土轮 7.振动松土铲图1 振动松土装置结构示意图Fig.1 Vibration device structure diagram
1.2 振动松土装置的工作原理
麻山药收获机振动松土机构的动力由液压泵通过液压马达提供,通过节流阀加溢流阀来控制液压马达的转速。液压马达动力输出轴通过链传动带动偏心轮转动,偏心轮通过振动传递连杆使松土铲上下往复振动,实现振动松土装置对土壤的疏松。通过改变偏心轮的偏心距来调节振动松土装置的振幅,改变偏心轮的转速来调节转动振动松土装置的转动频率。
2 振动松土装置的三维建模及运动仿真
2.1 振动松土装置的主要参数
影响振动松土装置牵引阻力和功耗及麻山药的收获质量的影响因素主要有:偏心轮的偏心距e、偏心轮的转速n,以及振动松土铲的尺寸、开沟装置切削深度和传输连接杆的长度等。偏心距过大过小都会影响工作质量,选定偏心距e初始值为30、40、50mm进行仿真分析。振动松土铲的尺寸也会影响振幅,且振动松土铲的长度太大,会加大阻力和功耗,故振动松土铲长设定为300mm,宽为250mm。
麻山药收获机工作时,链刀开沟装置切削深度为1 000mm,而振动松土铲在地下900mm处上下振动松土,链刀开沟装置开沟深度要比振动松土装置的工作深度大100mm:如果小于100mm,振动松土铲工作时,可能碰到没有疏松的硬土层;如果大于100mm,链刀开沟装置会增加功耗。因此,振动松土铲的振幅要小于80mm,振幅过大会将麻山药挤压振断或者使麻山药破损。
振动松土装置的动力由液压马达经过链条传递到动力传输轴上,动力传输轴和偏心轮是通过键连接,动力再经过动力传输连接杆传递到振动松土铲上,动力传递连杆的长短决定着振动松土铲工作的深度,设计动力传输连接杆的长度为1 530mm。
2.2 振动松土装置的三维建模
首先利用SolidWorks软件将麻山药振动松土装置进行三维建模,并进行干涉检查。振动松土装置的三维模型和干涉检查如图2所示。
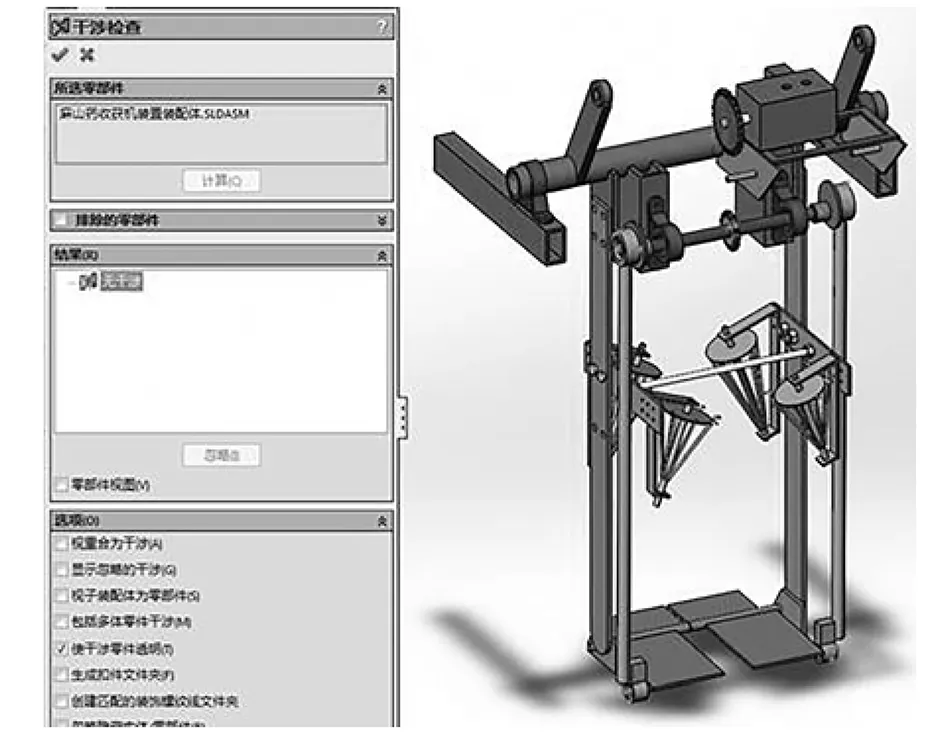
图2 振动松土装置的三维模型和干涉检查Fig.2 The three dimensional modal and interference checking of vibration device
2.3 模型导入以及分析前处理
将建立的振动松土装置三维模型转换成Para solid中间格式(X_T),导入ADAMS软件中进行运动仿真分析。振动松土机构仿真模型如图3所示。

图3 振动松土机构仿真模型Fig.3 The simulation model of vibration mechanism
在ADAMS软件中,定义麻山药收获机的前进速度为3m/min,参考牛蒡收获机偏心轮以540r/min的转速转动[5],将偏心轮的偏心距分别在30、40、50mm情况下进行仿真分析。
2.4 机构运动特性仿真分析
对铲尖和铲尾的位移、角速度和角加速度进行仿真分析。设置仿真时间End time=1s,分析步长step=500。偏心轮的偏心距为30mm时,仿真结果如图4~图7所示。
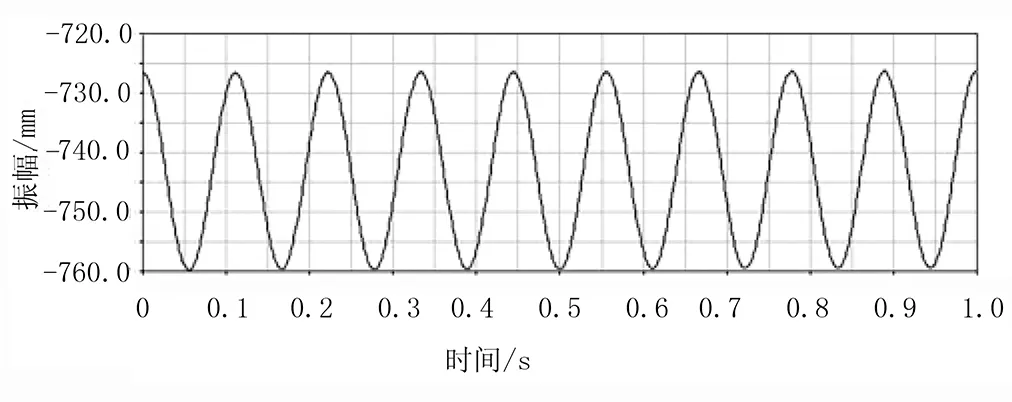
图4 铲尖的振幅变化Fig.4 The amplitude of front changes
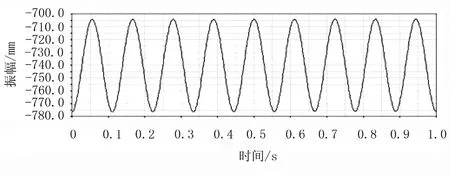
图5 铲尾的振幅变化Fig.5 The amplitude of back changes
由图4和图5可知:当偏心轮的偏心距为30mm时,铲尖的振幅为16mm,铲尾的振幅为36mm,曲线为三角函数趋势,符合振动松土装置实际工作状态。
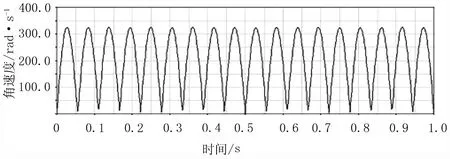
图6 铲尖的角速度Fig.6 The angular velocity of front shovel
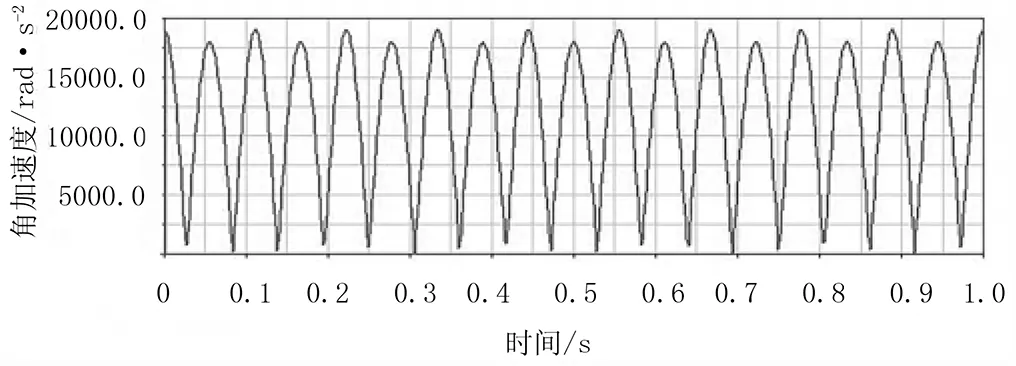
图7 铲尖的角加速度Fig.7 The angular acceleration of front shovel
由图6可知:当偏心轮的偏心距为30mm时,振动松土铲铲尖的角速度峰值为320rad/s。
由图7可知:当偏心轮的偏心距为30mm时,铲尖的角加速度峰值为53 000rad/s2。
偏心轮的偏心距为40mm时仿真结果,如图8~图11所示。
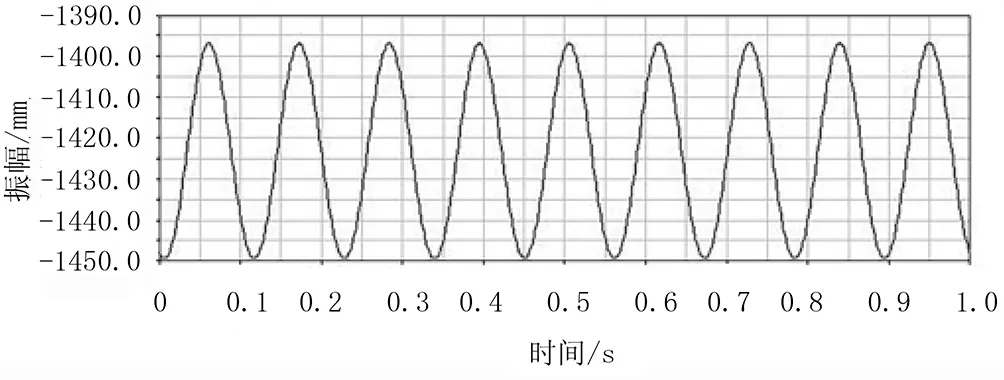
图8 铲尖的振幅变化Fig.8 The amplitude of front changes
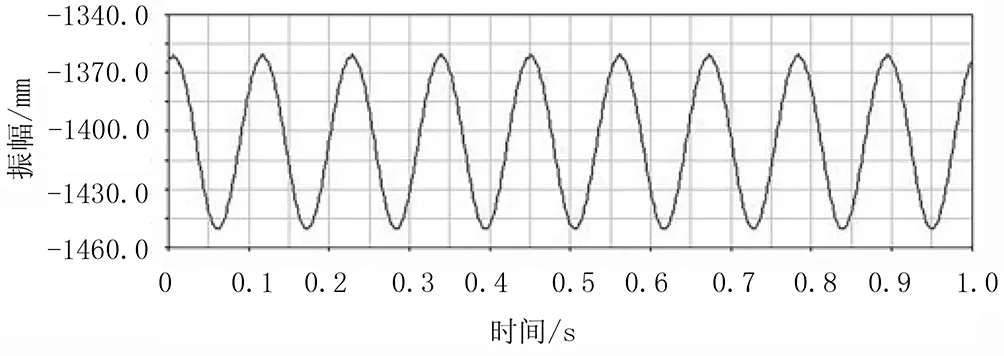
图9 铲尾的振幅变化Fig.9 The amplitude of back changes
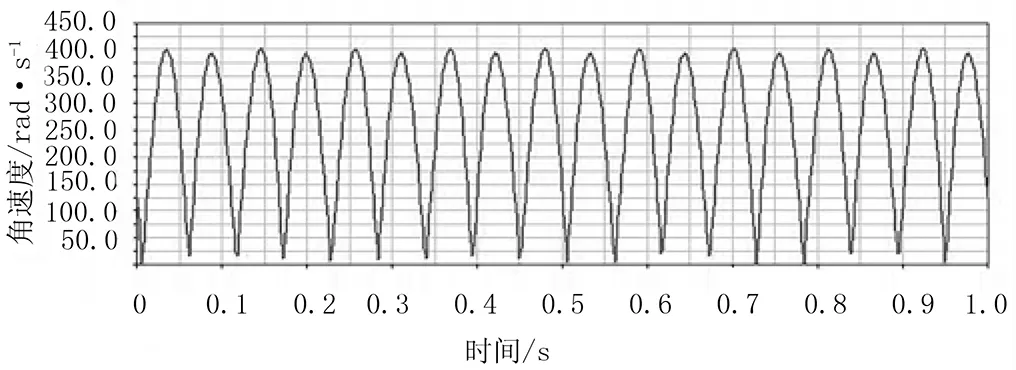
图10 铲尖的角速度Fig.10 The angular velocity of front shovel
由图8和图9可知:当偏心轮的偏心距为40mm时,铲尖的振幅为26.5mm,铲尾的振幅为44.5mm。曲线为三角函数趋势,符合振动松土装置实际振动工作状态。
由图10可知:当偏心轮的偏心距为40mm时,振动松土铲铲尖的角速度峰值为400rad/s。

图11 铲尖的角加速度Fig.11 The angular acceleration of front shovel
由图11可知:当偏心轮的偏心距为40mm时,铲尖的角加速度峰值为24 000rad/s2。
偏心轮的偏心距为50mm时仿真结果如图12~图15所示。
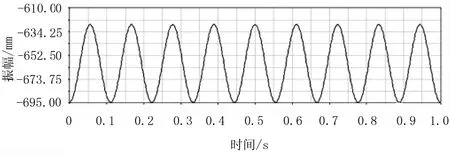
图12 铲尖的振幅变化Fig.12 The amplitude of front changes
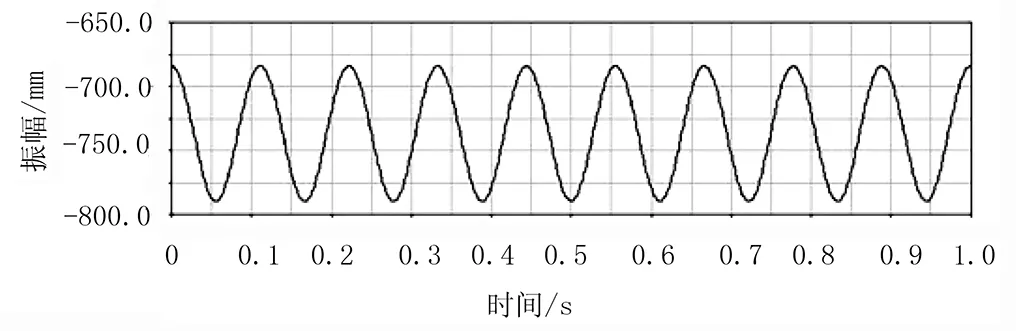
图13 铲尾的振幅变化Fig.13 The amplitude of back changes
由图12和图13可知:当偏心轮的偏心距为50mm时,铲尖的振幅为35.8mm,铲尾的振幅大约为53mm,曲线为三角函数趋势,符合振动松土装置实际振动工作状态。
由图14可知:当偏心轮的偏心距为50mm时,振动松土铲铲尖的角速度峰值为490rad/s。
由图15可知:当偏心轮的偏心距为50mm时,铲尖的角加速度峰值为30 000rad/s2。
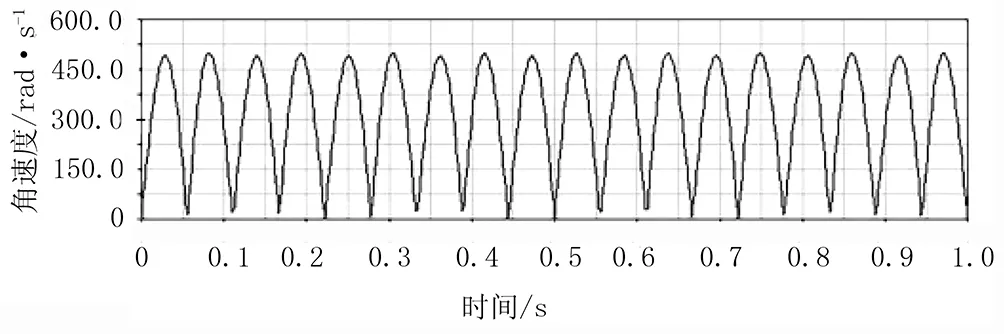
图14 铲尖的角速度Fig.14 The angular velocity of front shovel
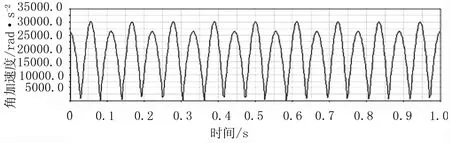
图15 铲尖的角加速度Fig.15 The angular acceleration of front shovel
经过仿真模拟后,分别对比偏心轮的偏心距在30、40、50mm情况下振动松土装置的振幅、振动松土铲铲尖角加速度的曲线,根据曲线可以得出偏心轮的偏心距、铲末端的振幅和铲尖角加速度参数分析表,如表1所示。
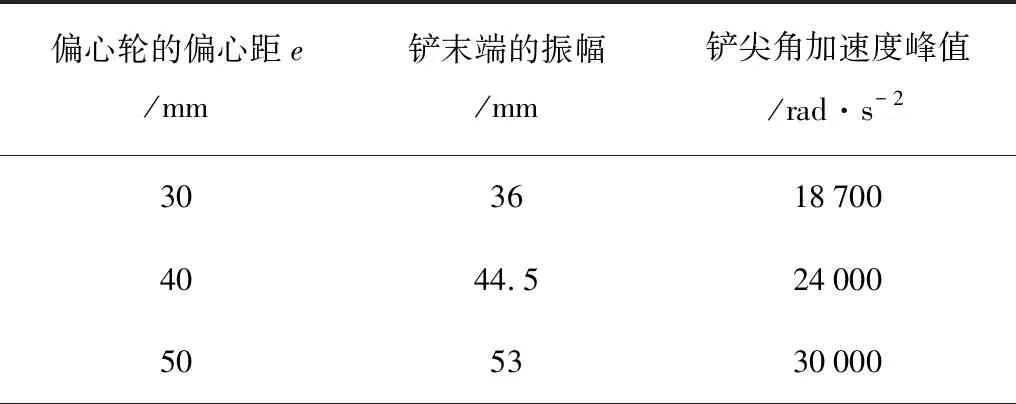
表1 偏心距、振幅、铲尖角加速度分析表Table 1 Eccentricity,amplitude,angular acceleration analysisTable
当偏心轮的偏心距为30、40、50mm时,3个振幅都能满足振幅小于80mm的要求。从振幅的角度考虑,可以看出当偏心距为50mm时的振幅最大,为53mm,振幅最优;其次是振幅为44.5mm,最后是振幅为36mm。从振动松土铲铲尖的角加速度峰值考虑,当偏心距为30mm时,铲尖角加速度为18 700rad/s2;当偏心距为40mm时,铲尖角加速度为24 000rad/s2;当偏心距为50mm时,铲尖角加速度为30 000rad/s2。从振动松土铲的振幅和铲尖角加速度两个方面综合考虑,选择偏心轮的偏心距为50mm最佳。当偏心距为50mm时,振动松土铲的振幅为53mm,角加速度为30 000rad/s2。
当偏心轮的偏心距为50mm时,铲末端在振动传递连杆方向上的加速度曲线如图16所示。由图16可知:振动松土铲末端在上下摆动过程中,最大加速度为1.75E+005mm/s2。
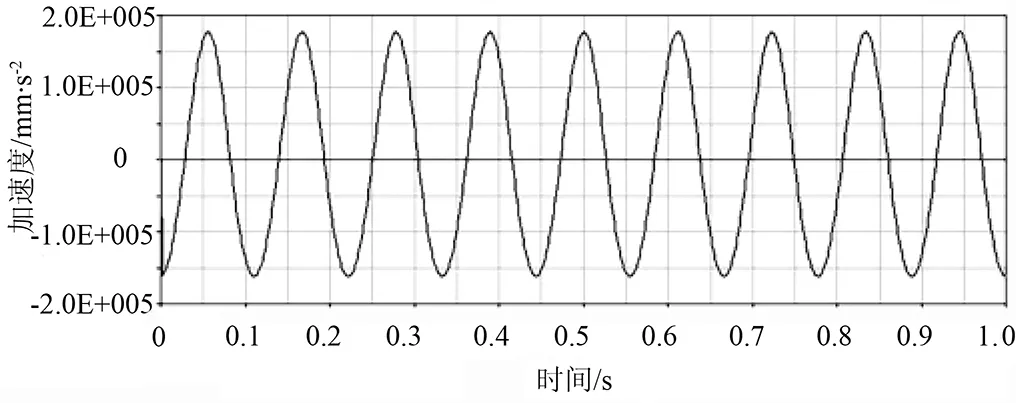
图16 铲末端在振动传递连杆方向的加速度Fig.16 The acceleration of the shovel tip in the direction of the vibration transmission link
3 振动松土装置的田间试验
3.1 试验条件
试验地址选在河北省保定市蠡县孙庄的麻山药种植区,在试验田内选择一块地势较为平坦的地作为试验的试验区,按照机组试验方案要求,在试验前对实验区进行规划[6]。该试验区长度300m,宽度20m,土壤为壤土,试验对象为麻山药中的“紫药”品种,预设麻山药收获机的开沟深度为1 000mm。
试验现场麻山药收获机的作业效果如图17所示。机器作业后,土壤疏松,人工拔出麻山药轻松省力。

图17 麻山药收获机作业效果Fig.17 The operation effect of yam harvester
3.2 作业性能指标测定
通过麻山药收获机田间试验,测试麻山药收获机振动松土装置的作业效果,检测损伤率、折断率和破损率。
机器作业后,按每30m选一个点测算,总共选取10个测点,在每个测试点随机选取20棵麻山药根茎进行检测。采用人工辅助提拉捡拾的方式,收集试验的麻山药,检测点的位置应避开地边和地头;计算每点收获的麻山药总数,从中挑出折断的和破损的麻山药,试验结果如表2所示。有
(1)
(2)
式中TZ—折断率(%);
TP—破损率(%);
W—收获的麻山药的总棵数;
WZ—收获的麻山药中折断的麻山药的棵数;
WP—收获的麻山药中破损的麻山药的棵数。

表2 根茎折断率调查表Table 2 The breaking rate of root survey Table
根据表2的数据,分别按照式(1)、式(2)计算折断率和破损率,可以计算出根茎折断率为1%、根茎破损率为2.5%、根茎的损伤率为3.5%,满足企业标准总损伤率低于5%的要求。
4 结论
1)运用ADAMS软件对机组前进速度、偏心轮转动速度和偏心距进行运动仿真分析,结果表明:机组前进速度为3m/min、偏心轮转动速度为540r/min、偏心距为50mm时性能最优。
2)试验表明:机器作业后,土壤疏松,人工拔出麻山药轻松省力,大大提高了作业效率,降低了辅助劳动强度。
3)田间试验结果表明:人工拔出根茎轻松省力,根茎的损伤率为3.5%,满足企业标准《Q /JL001-2016麻山药收获机》[7]相关要求。