气力推进艇运行中水流场状态及阻力模拟分析
2019-05-23赵小婷储江伟李洪亮吴勃生
陈 萌,赵小婷,储江伟,李洪亮,吴勃生
(东北林业大学 交通学院, 哈尔滨 150040)
湿地具有的抵御洪水、调节气候、促淤造陆等功能,是其他生态系统所不可替代的。因此,世界各国都十分强调对湿地的保护。但是,由于湿地特殊的地理环境,传统的水上交通运载工具在此类区域的使用受到了一定限制,这给湿地的生态环境监测与保护带来了不便。与传统的交通运载工具相比,气力推进艇凭借着在沼泽、浅滩和湿地区域移动便捷、迅速等特点,已成为当今湿地交通的主要工具[1]。例如,在美国Florida的Gatorpark地区,加拿大巴伦斯( Brysons) 地区和大湖地区都有气力推进艇的观光项目[2];在马来西亚地区,气力推进艇已用于沿海和河流生态环境的实地调查[3]。同时,相关的文献也报道了气力推进艇在冰雪情况下用于救援的特殊功用[4]。综上所述可以看出,在国外气力推进艇已用于湿地勘查、灾害救援以及观光旅游等诸多方面,并体现出了其他交通运载工具不可比拟的特点。与国外相比,我国目前对相关产品的研究应用还较少。
湿地是一种带有静止或低速流动水体的成片浅水区域[5]。在此种环境条件下,气力推进艇在行驶过程中水的流场状态及其艇体的受力状态与其他在江河中行驶的船舶有差异[6]。为此,本文采用XFlow软件,对气力推进艇的运动状态进行模拟分析,求解计算气力推进艇在达到稳态运动过程中艇体周围的瞬态流场,评估在不同推进力作用下的运行阻力、加速性能和艇体所受静态压力等特性,为气力推进艇的设计制造提供参考依据[7-8]。
1 气力推进艇的动力平衡分析
1.1 气力推进艇的基本组成
气力推进艇由艇体、动力系统、转向机构(方向盘、转向舵)、附属装置等组成。其中,动力系统由发动机、传动机和螺旋桨等零部件组成,如图1所示。

图1 气力推进艇的基本组成
气力推进艇的动力系统是用发动机产生的原动力驱动螺旋桨转动,并由螺旋桨产生的推力克服艇体运动过程中的阻力使之运动前行,即构成“机-桨-船”体系,且使原动力、推进力和运行阻力之间达到动力传递的平衡。本文所研制的样机选用了4G63S4T 2.0L增压汽油发动机,其额定功率为130 kW,最大输出转矩为253 N·m,设计运行速度为30 km/h,载质量为130 kg,总质量为530 kg。艇体采用铝型材焊接,结构尺度参数如表1所示。
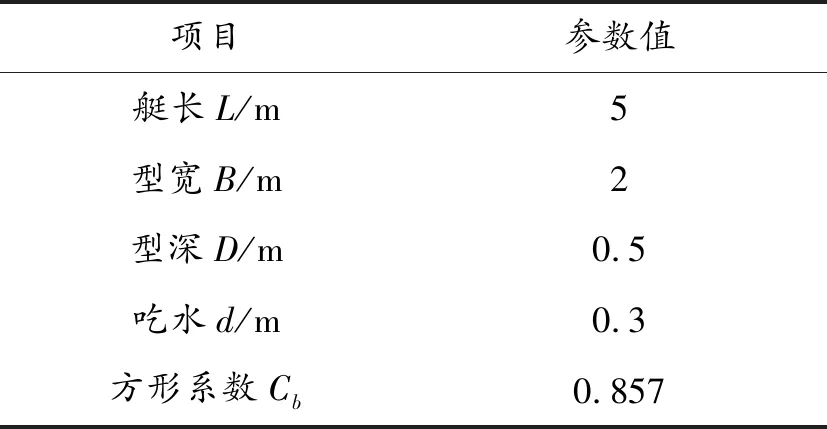
表1 艇体结构参数
1.2 运动阻力分析
对推进艇航行中所受阻力进行分析和预测,是艇体结构优化、推进系统设计和主机功率确定的参考依据。当气力推进艇在水面上航行时,处于空气和水2种流体介质中,受到空气和水对艇体阻力的作用,即艇体所受到的总阻力是空气阻力和水阻力之和。空气阻力是指空气对艇体水上部分的反作用力,水阻力是水对艇体水下部分在运动过程中产生的反作用力。
水阻力的总阻力可以分为摩擦阻力、兴波阻力和黏压阻力,其产生的主要原因是:
1) 摩擦阻力Rf。由于水的黏性作用在艇体表面形成很薄的边界层,当艇体运动时带动部分水的运动,且边界层内的速度梯度相对较大,艇体表面受到剪切应力而造成运动阻力。
2) 兴波阻力Rw。艇在静水中航行时,随着艇体的运动会在水面上产生波浪,航速越高,水面波浪的兴起越明显。波浪的产生影响着艇体表面的压力分布,使艇首部和尾部产生压力差而对艇体运动形成阻力。
3) 黏压阻力Rpv。在航行过程中因水具有黏性而使艇尾处形成漩涡,产生漩涡处的压力一般比较小,使艇首部和尾部形成压力差而产生艇体运动阻力。
水阻力的总阻力Rt可表达为:
Rt=Rf+Rw+Rpv
(1)
式中:Rf为摩擦阻力(N);Rw为兴波阻力(N);Rpv为黏压阻力(N)。
由于黏压阻力一般所占比例不大,且实际上难以与兴波阻力分开,故通常把黏压阻力与兴波阻力合并在一起称为剩余阻力Rr。因此,船体总水阻力Rt又可分为摩擦阻力Rf和剩余阻力Rr两部分。根据气力推进艇的结构特点,船的运动阻力主要是船体摩擦阻力、剩余阻力及空气阻力。在艇体设计阶段,可以利用艇体在流体中的仿真模拟分析估计运动阻力。
1.3 气力推进艇动力平衡方程
以推进艇质心为坐标系的原点o(x,y,z),设浮力Ff作用点在浮心(与所排开液体体积的形心重合),其坐标点为o1(x1,y1,z1);螺旋桨推力T的作用点在气力螺旋桨的轴心,其坐标点为o2(x2,y2,z2);剩余阻力Rr的作用点在o3,其坐标点为o3(x3,y3,z3);风阻力Fw的作用点在艇体水面以上部分的与纵向轴线垂直的横截面中心点,其坐标点为o4(x4,y4,z4);艇体的纵倾角为α,剩余阻力Rr与x轴的夹角为γ,如图2所示。
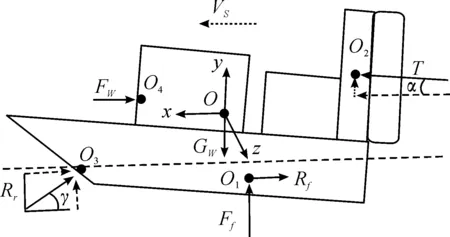
图2 气力推进艇的受力分析
在x-y坐标系内,沿x轴的气力推进艇动力平衡方程为
Tcosα-(Fw+Rf+Rrcosγ)=ma
(2)
式中:m为总质量(kg);α为加速度(m/s2)。
1.4 船体总水阻力估算方法
船体总水阻力Rt又可分为摩擦阻力Rf和剩余阻力Rr两部分。为了从实验求得实际气力推进艇阻力,根据傅汝德假定:假定总阻力分为两部分,一部分是只与雷诺数有关的摩擦阻力,另一部分则是与傅汝德数有关的剩余阻力:
(3)
式中:ρ为流体密度(kg/m3);v为气力推进艇运行速度(m/s);S为艇体湿水表面积(m2);Cf为摩擦阻力系数;Cr为剩余阻力系数。
摩擦阻力系数Cf可用相当平板摩擦阻力公式,在速度为对数分布时的桑海公式、柏兰特-许立汀公式和休斯公式计算,但各公式的计算结果有一定的差距。对此,在第八届国际船模试验池会议(ITCC)对当时的各计算公式进行了整理和比较,最终提出了1957ITCC公式,其表达式为:
(3)
(4)
式中:Re为雷诺数;LW为水线长(m);μ为流体运动黏性系数。
在船模与实船几何相似的基础上,剩余阻力系数Cr只与傅汝德数有关。本项目研制的气力推进艇属于河流水域用小型船舶,故体积较小,几何形状较为简单。本文所建立的气力推进艇模型与艇实体等比例,所以剩余阻力系数可按式(5)得到,而Rr直接由软件求得:
(5)
2 气力推进艇运动区域流场状态模拟分析
2.1 运动区域流场理论
传统的计算流体力学(computational fluid dynamics,CFD)方法是基于有限元法、有限差分和有限体积法进行空间离散的近似[9],而且需要对模拟对象进行网格划分,而划分网格质量对运算结果的准确性影响较大,对于复杂流场还需要进行局部网格的细分,这将耗费大量的人工时间及劳动量。本文所采用的XFlow模拟分析软件基于格子玻尔兹曼方法(Lattice Boltzmann method,LBM),在湍流模型上将精确的大涡模拟(LES)与格子玻尔兹曼方法(LBM)结合[10],可以增强对复杂几何模型和移动边界问题的处理能力,模型无需过分简化即可实现艇体模型符合刚体运动学的运动分析。
2.2 流体计算域选择
本文在模拟计算过程中,考虑到计算量的影响,将艇体的模型进行了适当简化,简化后艇体的尺寸为长5 m、宽2 m、高0.5 m。在模拟仿真中计算域尺寸的加大会增加对计算机硬件要求,且计算时间更长。因此,在满足模拟精度和兼顾尽量缩短仿真时间的同时,经过多次测试确定最优流体计算域尺寸设置(长200 m、宽10 m、高4 m、流体深2 m)。其简化艇体模型及流体计算域如图3所示。

图3 艇体简化模型及流体计算域
选取长度为200 m的流体计算域,可以足够地满足模拟仿真为20 s的时长。模拟初始点在艇体尾部距流体计算域后端20 m的位置,可以减小开始运行后尾流接触壁面反作用于艇体的影响;艇体头部距流体计算域前端175 m,使艇体有足够长的运行距离而不至于冲出模拟流体域。考虑到减少侧面流体触碰流体域边界反作用于船体的影响,使流体计算域的宽度为10 m,是艇体宽度的5倍。
2.3 流场状态模拟分析
在螺旋桨推力为600 N的条件下,气力推进艇运动区域水流场状态的数值模拟结果如图4所示。
1) 流速场分布。气力推进艇周围的流速场分布不均匀,前后两端的流速大于左右两侧;其流场中最大的水流速度为4.53 m/s,且位于船体尾部区域,如图4(a)所示。
2) 压力场分布。气力推进艇艇体周围的压力分布不均匀,且最高的压力分布在尾端的艇体底部,如图4(b)所示。在与之相对应的艇体前端,艇体与水流相对速度较小,对艇体的静压力较小。
3) 涡度场分布。速度稳定后水流的涡度场如图4(c)所示,艇体尾部区域水流旋转最为剧烈,即涡度最强。此区域的湍流强度也最大,如图4(d)所示。
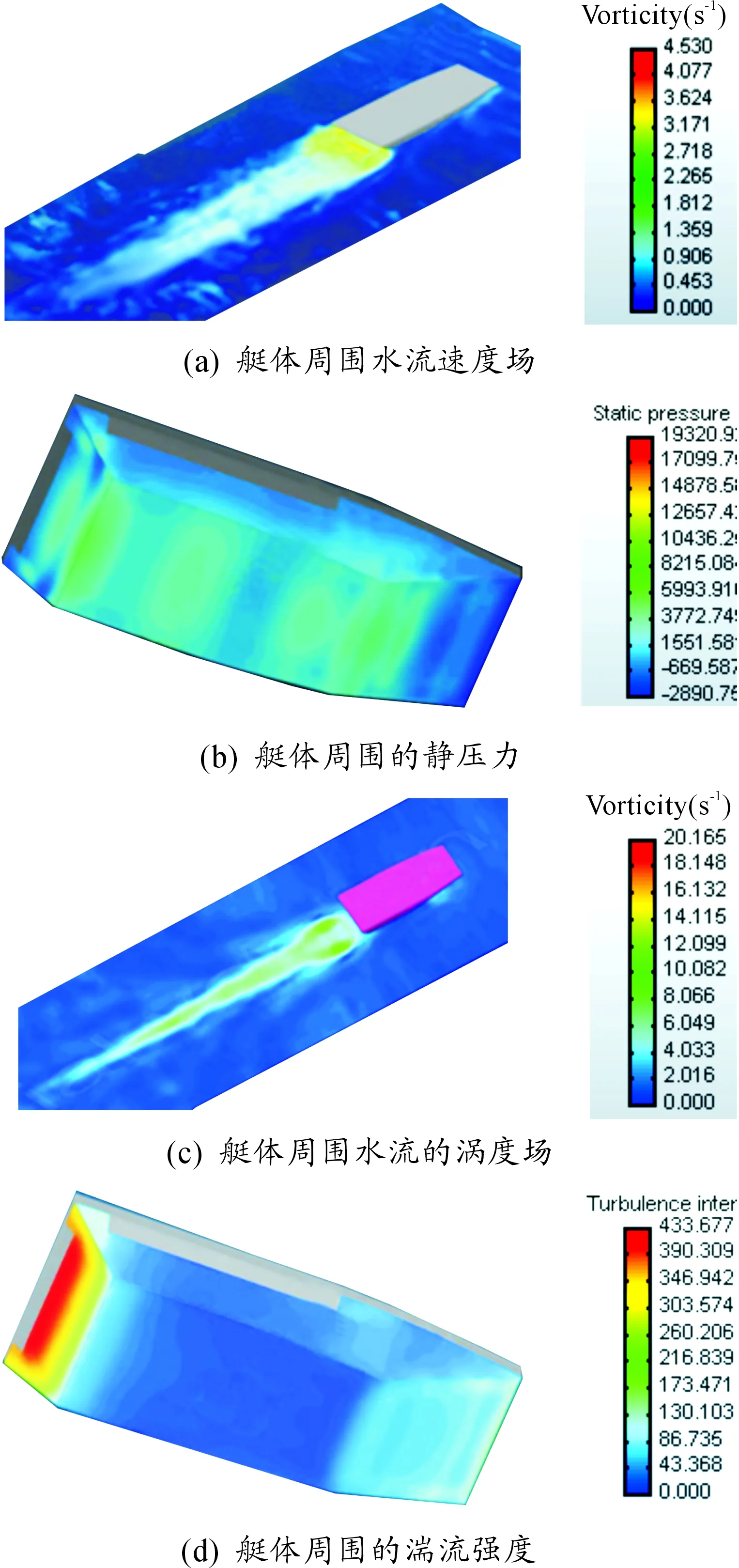
图4 气力推进艇运动区域水流场状态的数值模拟
3 气力推进艇运动阻力模拟分析
3.1 运行速度及阻力模拟分析
目前,研究推进艇阻力的方法有理论研究方法、水池船模试验方法和数值模拟计算方法3种。本文采用XFlow软件模拟计算船体运行阻力,如图5所示。
气力推进艇运行速度变化过程如图6所示,螺旋桨推力为600 N,当达到稳定运行状态时所需时间约13 s,速度约为7.8 m/s。螺旋桨推力为300 N,当达到稳定运行状态时所需时间约17 s,速度约为4.9 m/s。

图5 气力推进艇行驶阻力变化关系

图6 气力推进艇运行速度变化关系
3.2 运动阻力与运行速度的关系
根据使用XFlow数值模拟出的气力推进挺运行速度和运动阻力模拟结果输出,确定出在螺旋桨推力分别为300、600 N作用下的行驶阻力随运动速度变化关系曲线,如图7所示。

图7 行驶阻力随运动速度的变化曲线
4 运动阻力试验及与模拟结果的对比分析
4.1 运动阻力试验方法
在模拟分析的基础上,利用本研究项目研制的气力推进艇进行恒推力下加速性能测试,试验地点为松花江流域的潜水区域以模拟湿地生态区域。具体测试过程为:气力推进艇在静止水域中,从初速度v0=0开始,启动发动机使其达到一定的转速后,螺旋桨桨叶旋转直到达到测试所需的300 N或600 N恒推力,进行相关阻力测试。从气力推进艇在静止水域到加速行驶的过程中,不考虑风阻影响,将式(2)简化为:
T-Rt=mai
(6)
式中ai为i时刻的瞬时加速度。
同时,依据加速度、速度和时间的关系,即
ai=(vt-v0)/t
(7)
可得出推进艇加速过程中的水流阻力的表达式为
Rt=T-m(vt-v0)/t
(8)
式中:vt为末速度(m/s);v0为初速度,这里指达到恒推力后的速度(m/s);t为由v0加速到vt的时间(s)。
依据试验测得的发动机转速与螺旋桨推力的关系如图8所示。控制发动机以某一稳定转速(4 600 r/min)运行,即保持螺旋桨推力(600 N)基本不变,记录运行状态的数据,测试情景见图9所示。按照同样的测试方法记录螺旋桨推力为300 N时的运行数据,根据式(8)计算相应的运行阻力。

图8 螺旋桨静态推力实验数据

图9 阻力测试场景
4.2 运动阻力测试与模拟结果对比
在螺旋桨推力为300 N 和600 N的运行条件下,气力推进艇模拟与测试的行驶速度、运行阻力的对比结果,见表2。

表2 模拟值与实地测试值情况对比
螺旋桨推力分别为300 N和600 N的实地测试结果表明:当艇体达到稳定运行状态时的速度及按公式计算的阻力值均小于模拟值,推力为600 N时的实际运行速度与目标运行速度存在一定的差距,主要是因为艇体在加速的过程中,随着速度的逐渐增大,除水体施加在艇体的阻力增加外,与运行速度相关的空气阻力所占比例也不断增加,导致速度越高,速度差越大。
5 结论
1) 利用XFlow软件分析了在最佳推力下的气力推进艇周围流体流场状态,最大的水流速度和最大涡度出现于艇体稳定运行后的尾流区域,且艇体的前端的水流速度相对较小,流体流动具有连续性。
2) 分析了推进艇在不同螺旋桨推力下的运行状态。螺旋桨推力为300 N,气力推进艇的稳定运行状态时的速度约为5.16 m/s;螺旋桨推力为600 N,气力推进艇的稳定运行状态时的速度约为7.27 m/s,故运行阻力随运行速度增加而变大。
3) 随着推力的逐渐增大,推进艇达到运行稳态的时间逐渐缩短,且平均稳定运行速度逐步提高、滑行距离逐步缩短。
