便携式可见光多光轴平行性校正系统
2019-04-25王瑶李岩付跃刚
王瑶,李岩,付跃刚
(1.长春理工大学 光电工程学院,长春 130022;2.长春理工大学 科技处,长春 130022)
现役自行高炮的炮管轴线与瞄准轴线一起组成了高炮的多轴线系统。两轴线之间是否平行直接关系着高炮的打击火力和打击精度[1],如果各炮管之间光轴不平行,则炮弹火力将被分散,降低打击效果,实际着弹点与炮手预期着弹点将会出现偏差,降低打击精度[2-7]。因此对自行高炮的多轴线系统进行一致性检查十分重要,目前自行高炮多轴线一致性检查仍在100~300m处立靶,靶上刻有两个十字,十字的中心距离与炮管轴线和光学瞄准轴之间距离一致。仍沿用人工操作校靶镜瞄准远距离靶板的全手动方法,该方法需要多人配合反复调整靶板与基准轴垂直位置,存在着调整过程复杂、工作强度大、人员技能要求高、受场地和环境限制多等问题,费时费力,校准效率低。
本文研制了一套满足野外校正要求的便携式多光轴平行性校正系统,在大空间范围内建立一个高精度基准,并且能够实现测量基准的灵活传递[8],提供两已知角度的可变化间距的光轴(接近平行或完全平行)。为野外环境以及大光轴间距可见光多光轴系统提供了一种新的光轴平行性校正方法,提高了工作效率。
1 系统原理
便携式可见光多光轴平行性校正系统(如图1所示),主要由目标组、对准组、高精度长直线导轨和计算机等组成。目标组与对准组均安装在滑块上,且两滑块可在长直线高精度导轨上根据产品光轴间距调节其之间的距离,以供校正使用。
目标组主要包括准直平行光管I和数字式平行光管(CMOS位于物镜焦平面处),且两者由安装块固定在导轨上,两者安装调节后光轴之间夹角固定不变。
对准组主要包括准直平行光管II和准直平行光管III,且两准直平行光管由安装块固定在导轨上,两者安装调节后光轴角度固定不变。

图1 系统结构图
目标组与对准组中的准直平行光管光轴I和准直平行光管II光轴平行时,目标组中的数字式平行光管采集到对准组中的准直平行光管III中的十字分划信息(x,y)和分划倾斜角度β(完成定标)。当目标组与对准组中的准直平行光管光轴I和准直平行光管II光轴不平行时,则数字式平行光管采集到图2所示的四种情况中的一种。

图2 光轴夹角示意图
此时数字式平行光管将采集到十字分划信息(x1,x2)和倾斜角β',可通过公式(1)、(2)得出目标组与对准组的夹角(α水平,α垂直):

式中,μ为CMOS单个像元大小,f为平行光管物镜焦距。
2 系统设计
便携式可见光多光轴校正系统预期达到精度7″,CMOS选用IPG-53H20AF型,像素为1920×1080,像元大小为0.0028mm。

为满足可见光多光轴平行性校正系统的便携性,要求外形尺寸尽量小、重量轻、像质好,选取如图3所示光学结构,焦距f=80mm的光学系统进行设计,其设计结果如图3所示。

图3 物镜组示意图
成像系统的MTF曲线如图4所示,成像质量良好。

图4 物镜MTF曲线图

图5 光学系统点列图
图5为光学系统点列图,各视场弥散斑直径均小于所选CMOS一个像元尺寸,说明系统有较高的分辨率,可以保证成像的清晰性。
3 光轴一致性试验
按图6所示安装试验系统,将目标组和对准组分别安装在多维调整台上(方位、俯仰、横滚均可调节),并在前面放置大口径平行光管,用于校正对准组和目标组的准直平行光管光轴I和准直平行光管II平行。调节多维调整台使对准组和目标组的准直平行光管光轴I和准直平行光管II的十字分划中心分别与大口径平行光管十字分划中心重合,记录此时数字式平行光管中观察到的准直平行光管III的十字分划信息,完成系统定标(即初始数据获取)。
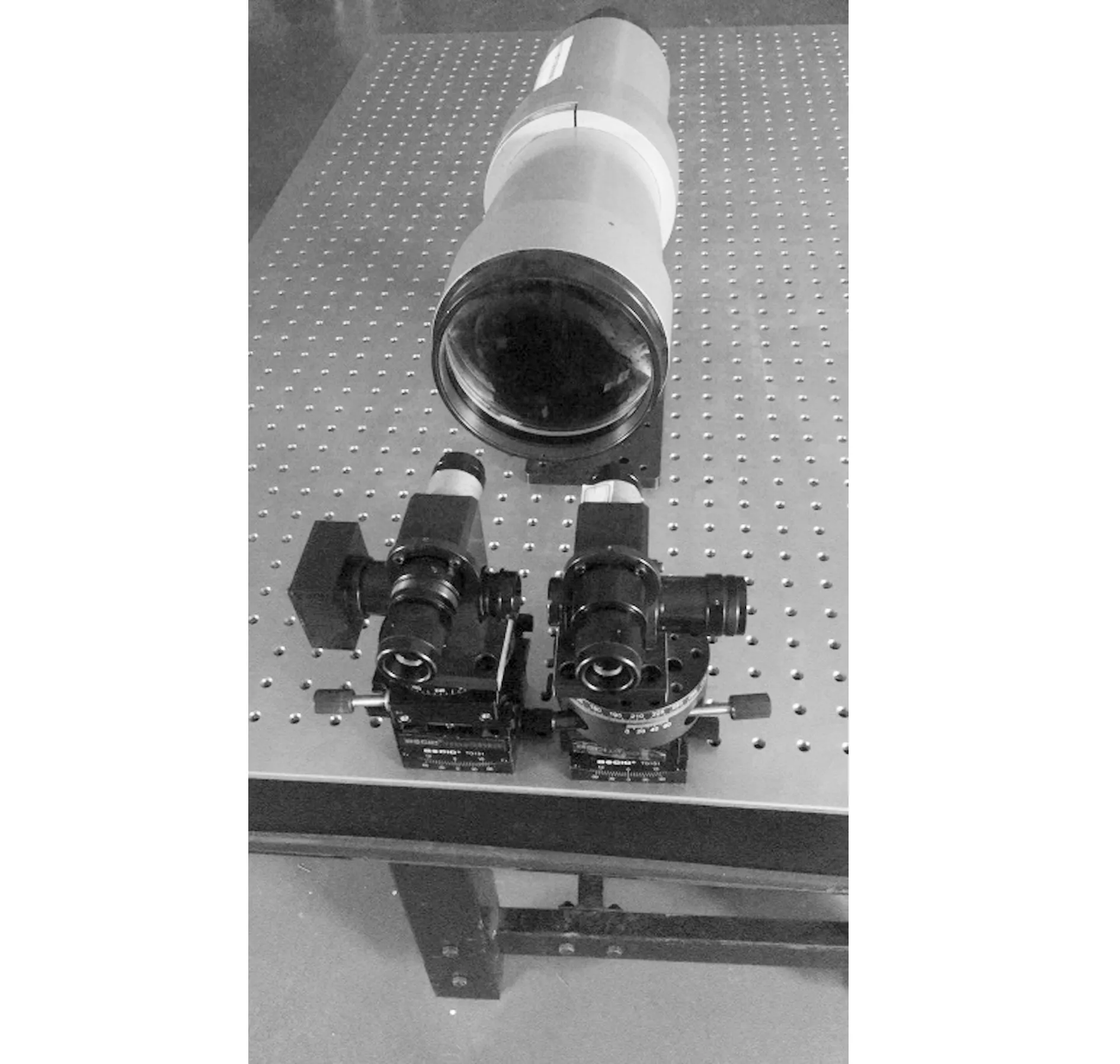
图6 试验结构安装图
然后目标组固定不动,调节多维调整台,使对准组中的准直平行光管II与试验用大口径平行光管的某一位置重合,并记录此时重合时准直平行光管II观察到的大口径平行光管的坐标信息(x1,y1)(单位为密位)。此时计算机将采集到目标组与对准组的两光轴夹角信息(x2,y2)。比较已知角度与试验结果,如表1所示。

表1 理论数据与测量结果
理论计算与实验结果相对比,数值的最大偏差为7″,可以证明理论与计算的正确性。高炮的炮管轴线与瞄准轴线平行线校正时,先将校炮镜装入炮管轴内,使其光轴与目标组上平行光管光轴平行。然后调节瞄准轴与对准组中上平行光管光轴平行,两者分别平行后即完成炮管轴线与瞄准轴线的平行行校正。
4 系统误差分析
在系统中产生误差的主要原因有:平行光管的视差(包括定标用前置镜视差)、CMOS判读十字分划位置时的像素误差、定标时人眼对准误差等。
平行光管的校正采用可调前置镜法,事先把前置镜调焦于无限远(确定零位),再通过它观察被检平行光管的分划板的像,若该分划板在前置镜的分划面上生成清晰的影像,且摆头时不能发现两分划线互相错动,即表示视差已被消除,否则,需轴向移动被检平行光管的分划板,直到视差消除为止。为减少调校的盲目性,先按下式计算平行光管:

式中,X'——观察到的被检分划板的清晰影像时,可调前置镜伸缩筒离开零位(调焦于无限远)的距离
X——被检平行光管轴向移动量
根据算出的值X移动平行光管后,只要X'不大于式(6),就认为平行光管视差在允许范围内:

D——平行光管物镜是有效口径(毫米)
用上述公式调整好后,平行光管仍有一些残余视差,主要来源于前置镜本身的残余视差ε(分)按式(5)传递给平行光管:

调焦误差所造成的残余视差:

式中,e—人眼对准误
τ—前置镜视放大率
DZ—平行光管与前置镜组合的有效口径
数码前置镜中CMOS采集系统的判读精度为1/2个像素,图像采集精度为:

CMOS像元大小为0.0028mm,平行光管焦距为80mm。
综上所述,系统总误差[9-10]:

5 结论
本系统提供的校正方法是在传统的校正检校方法上增加了CMOS,减少了人眼识别带来的误差。在高炮的炮管轴线与光学瞄准轴平行性校正时,可以做到不受场地、人员限制,提高了校正效率。图7为该校正系统实物图,简化了仪器体积与结构,有利避免由于仪器长时间使用或摆放等环境因素改变而带来的误差,达到便携式、大光轴间距使用条件,解决了可见光大光轴间距野外校正问题,具有一定的使用价值。
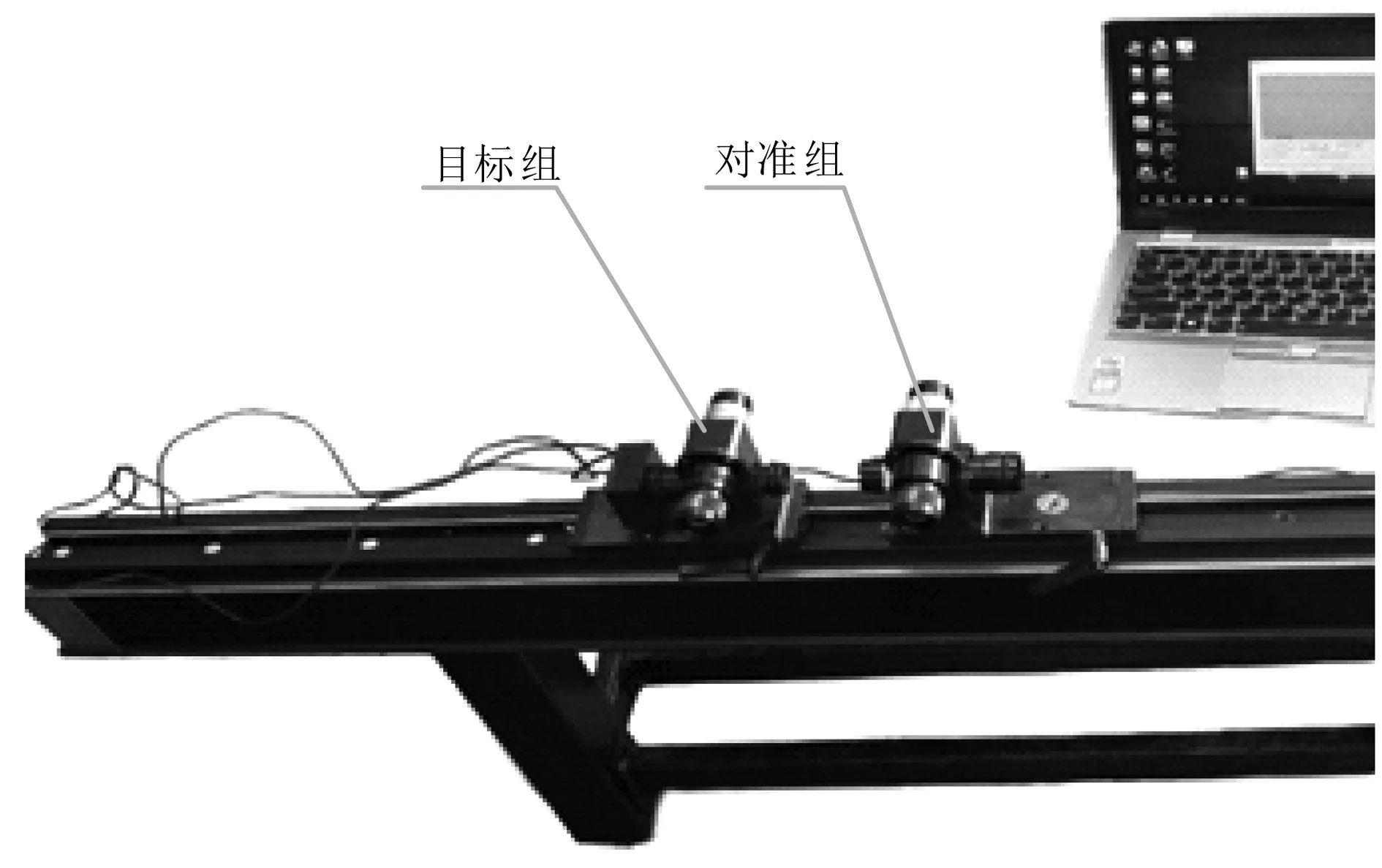
图7 产品实物图
