基于ATOS的异形件逆向方法研究
2019-04-25
(长春理工大学 光电工程学院,长春 130022)
随着现代工业节奏的加快,在产品设计领域上,传统的正向设计方法在很多情况下已经无法满足要求,而与之对应的逆向工程技术则受到了人们重视。逆向工程又称求反工程(Reverse Engineering),它是将实物的立体信息转化成可用计算机直接处理的数字信号,从而建立实物的数字模型的过程[1]。逆向建模流程如图1所示,主要由数据的测量、数据的预处理、曲面重构和CAD模型的建立和修改四部分组成,其中数据的测量是逆向工程中的关键一步。数据的测量根据测量头是否与被测件表面接触分为接触式测量和非接触式测量两类。在非接触式中,ATOS三维光学测量系统作为非接触式测量技术的代表之一,在商品化的光学测量中最为流行,其优势在于可迅速采集大量实物表面数据点并且精度很高[2]。

图1 逆向建模流程
1 ATOS系统的工作原理
ATOS流动式光学扫描仪是基于光三角、条纹投影和相位移动等原理对被测物体进行快速高精度的非接触测量。ATOS扫描系统由硬件系统和软件系统组成,如图2所示。硬件部分主要由测量头、连接控制器、支架、高性能电脑、电缆等辅助测量装置组成。其中测量头主要是由两个CCD相机和一个光源(蓝光)组成,测量头由一个带有六个自由度的配套支架支撑,根据测量需要可随意转动测量头以便测量[3]。软件系统的操作平台为Linux系统,ATOS系统自带的GOM inspect软件能实时监控测量结果,且具有数据预处理功能的相关模块。整体扫描系统的实验平台搭建如图2。

图2 ATOS扫描系统
测量时光源发出的光照射到被测物体表面形成漫反射,两台CCD相机同时接收漫反射回来的光线,由于被测物体表面存在形状特征高低变化,CCD接收到的成像点所呈现的位置也不断变化,根据成像点移动距离的大小和传感器的结构参数,结合三角形原理,可以计算出被测件表面的空间位置。
ATOS扫描系统在获取点云数据时,需要对被测件进行多次多角度扫描,因此就需要系统识别出被测件表面的参考点进行点云数据拼合。第一次扫描时,系统会对识别到的参考点进行编号,在后续的测量中,只需保证至少三个有编号的参考点在拍摄范围内即可实现对测得的不同点云数据进行拼合。
由系统识别并匹配出的参考点在两个相机相面坐标系上的坐标,计算出坐标系转换关系[4]。为了计算简便,以匹配三个参考点为例,则它们的坐标变换关系如下表示:
通过变形整理可得:

求解上式可得r1~r3,即可求出tx、ty、tz,所以在每次拍摄时,保证至少能拍摄到三个有编号的参考点即可完成坐标系的转换,实现参考点及点云数据的自动拼合。
2 异形件的曲面重构
2.1 数据的测量
数据的测量是逆向工程中关键一步。ATOS扫描系统安装好后,首先要分别对软件和硬件进行一次校准[5]。硬件校准主要是对两台CCD相机的光圈、焦距等参数进行校准,软件校准则需要用到ATOS自带标定板配合软件是两台相机相对空间相同点坐标进行匹配[6]。ATOS系统扫描检测被测件表面流程如图3所示。

图3 ATOS扫描系统操作流程
在对物体进行测量前首先要观察被测物体表面的光泽度、尺寸大小等。如图4为某型号汽车后视镜外壳,由于表面颜色过深或存在反光现象,会对测量结果产生影响,则需要在表面均匀喷涂显像剂。

图4 某型号汽车后视镜外壳
显像剂喷涂时需要掌握好喷嘴按压力度、移动速度和与被测件的距离,否则容易造成显像剂喷涂不均匀,影响测量精度[7]。在物体表面粘贴纸质参考点时,根据物体表面的曲率变化确定粘贴参考点的位置。在参考点粘贴的方式上,常用的参考点粘贴方式有两种:
(1)先喷涂显像剂,后粘贴参考点;
(2)将参考点贴在拍摄背景上。
经过多次实验发现,方法(1)虽然操作方便,但是存在粘贴不牢固的问题,而且显像剂喷涂的时候可能存在喷涂不均的现象,导致测量误差产生。方法(2)虽然能够有效降低参考点带来的误差,但是在测量过程中存在被测件无法移动的问题,导致被测件点云信息采集不完整。
为克服上述方法的局限性本文提出一种新的参考点粘贴方式:先粘贴参考点,后喷涂显像剂,再用沾水棉签将附着在参考点上的显像剂擦掉。这种方法虽然操作有些繁琐,但是它既不存在参考点移动或脱落的现象也不怕被测件的位置发生移动,而且通过实验发现ATOS系统具有自动补偿功能,在测量结束后能够自动补偿掉由于参考点厚度产生的距离,从而大大减小了数据测量时的测量误差。图5为粘贴参考点并喷涂显像剂后的汽车后视镜外壳。

图5 粘贴参考点并喷涂显像剂后的汽车后视镜外壳
每次拍摄时,只要保证至少有三个有编号的参考点,即可通过公式(2)完成坐标系的转换,自动拼合出完整的点云数据。
使用ATOS扫描过程中发现改变设置参数也会对测量精度产生影响。根据控制变量法的思想,保持测量头与被测件的相对距离、位置、角度均不发生改变,仅改变曝光值,在曝光值不同的情况下进行多次扫描,得到结果如表1所示。
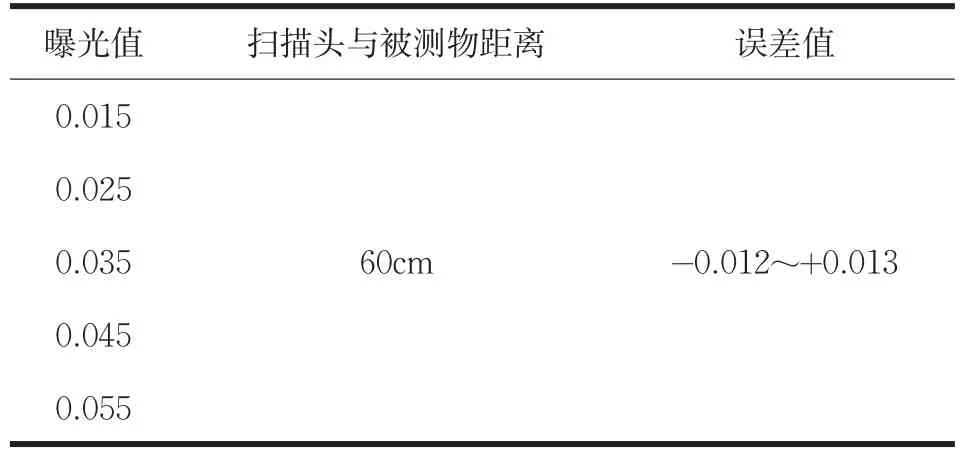
表1 曝光值对测量精度的影响
从表1中可以看出,曝光值的改变对测量精度的影响并不大,所以在测量过程中,只需选取适合拍摄的曝光值即可,不用过分在意其数值大小。
因为曝光值得影响并不大,所以选取适当曝光值即可,本文选取曝光值为0.035,通过改变扫描头与被测物距离,判断距离对精度的影响,通过多次实验得到结果如表2所示。

表2 测量距离对测量精度的影响
表2证明测量距离对测量精度的影响还是比较大的,测量距离在60~70cm左右时,测量误差值较小,超出这个范围,误差值显著增大。所以,最终选取测量距离在65cm左右。
扫描测量时两台CCD相机同时接收被测件的形貌信息,计算机自动进行处理运算,并且将扫描出来的点云图像呈现在显示器上。本文选取一款汽车后视镜外壳为被测件,经过ATOS扫描系统测量后的点云数据如图6所示。
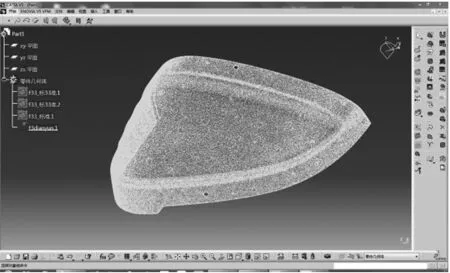
图6 汽车后视镜点云数据
2.2 曲面重构
将点云数据输出通过CATIA相应的模块进行预处理及曲面拟合、CAD模型重建等相关工作。当今世界上常用的三维软件众多,法国达索公司开发的CATIA软件功能强大,应用领域广泛。在逆向工程中,常用到DSE(数字曲面编辑)、QSR(快速曲面重构)、创成式曲面设计等模块[8-10]。三维模型重建流程如图7所示。
通过DSE导入点云数据的点云数量高达361797个,如此多数量的点云不但存在噪声点,还会降低CATIA的运行速度,降低了工作效率,所以有必要在保证精度的前提下减少数据量。目前常用的两种点云过滤方式是公差球法和弦公差法,对采集到的部分数据分别进行两种过滤方法过滤结果如图8所示。
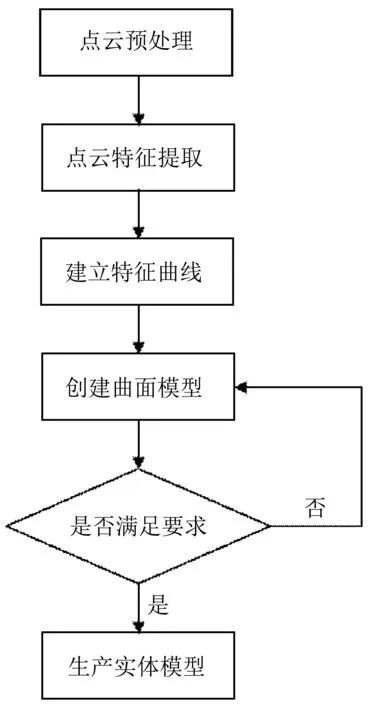
图7 三维模型重建流程
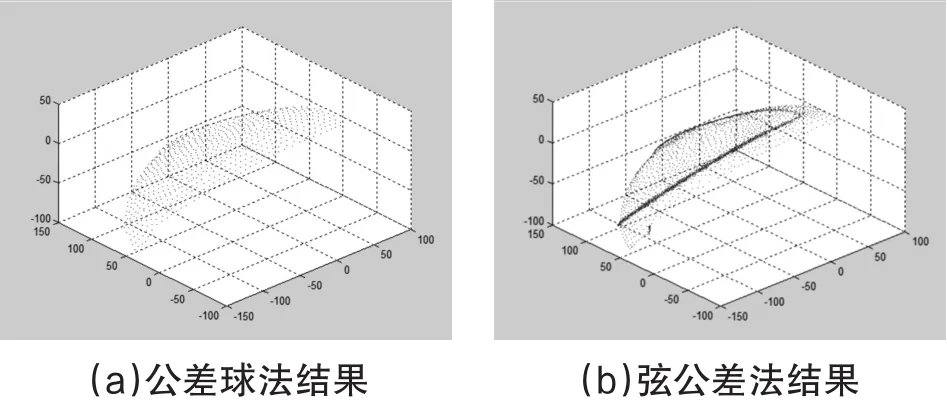
图8 两种不同方法过滤后的点云
对比图8(a)、(b)两张图可以看出,公差球法过滤后的点云对曲率变化不大的点云效果较好,但对存在突变、曲率变化大的地方效果较差,造成特征信息的严重丢失。弦公差法在曲率变化大的地方能够很好的保留特征信息但是点云过滤的效果并不是很好。
本文根据被测件特征信息丰富,存在边缘曲率变化大的特点,提出一种新的点云过滤方式,在保证特征信息不丢失的情况下尽可能多的过滤点云。先采用弦公差法过滤一部分点云,此时特征信息保留的非常完整,但是点云过滤效果一般,影响运行速度,再在此基础上进行均匀过滤,稀化特征信息处的点云数量。效果如图9所示。
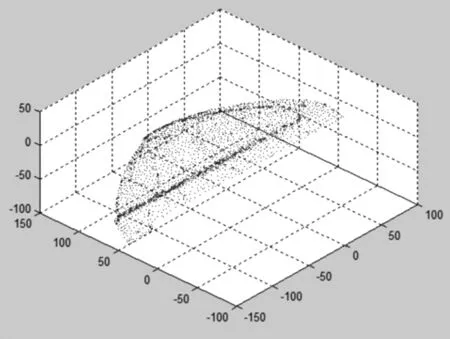
图9 本文提出的点云过滤方法处理结果
三种点云过滤方法处理后的点云拟合精度对比如表3所示。
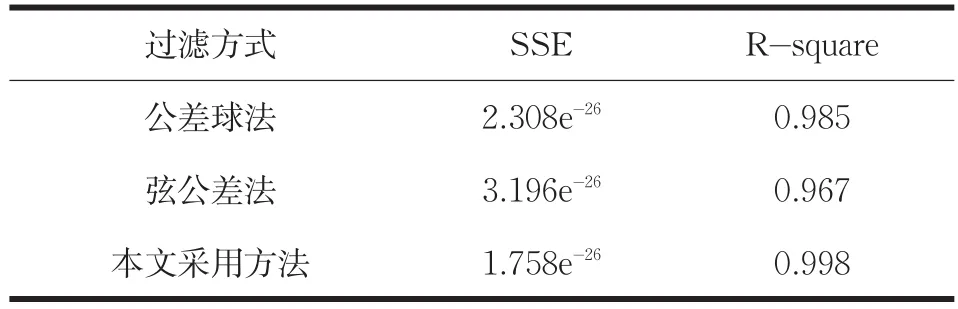
表3 三种方法的拟合精度
由上表可以看出,本文所采用过滤方法所产生的误差平方和最小,方程的确定系数R-square也更接近于1,说明此方法处理后的点云在进行曲面拟合时精度更高,而且能够在保证被测件特征信息完整的前提下大大减少点云数量,缩短处理时间。所以此方法对于处理这种整体曲率变化不大,局部存在曲率变化大的物体效果较好。
为了能够更好地辨识点云的各个特征,方便重建模型,需要将处理好的点云进行铺面并进行补洞等网格处理。处理结果如图10所示。

图10 处理后的网格数据
最后根据特征线提取,强力拟合,倒圆角等操作获取最终重建的模型。如图11所示。

图11 重建的模型
3 结论
针对表面反光的物体,本文采用了先粘贴标定点后喷涂显像剂的方法对异形工件进行处理,此方法大大减少了测量误差的产生,拍摄时选取65cm为最佳测量距离,并在点云过滤的时候采用了新的过滤的方法,这种方法不但缩短了数据处理的时间,同时在保证特征信息尽量不丢失的前提下,过滤掉了大量冗余点,点云拟合后的误差平方和约为1.758e-26。根据处理后的点云构造出来的曲面具有良好的连接性,得到的三维模型也很完整。实验结果证明:本文ATOS扫描参数的确定方法和点云过滤方法适合这类整体曲率变化小,边缘曲率变化大,特征信息丰富的被测件,能够为后期曲面拟合提供高质量的点云,达到提高曲面重构精确性和提高工作效率的目的。
