基于OOPN的穿村镇路段交通安全设施作用研究
2019-04-19尹心怡肖贵平张铁军
尹心怡 ,肖贵平,张铁军
(1. 北京交通大学交通运输学院,北京 100044;2. 交通运输部公路科学研究院,北京 100044)
随着城镇化的发展,我国建制镇90%以上是过境公路穿城的布局[1],很多过境公路与村镇主干路合二为一,过境交通与村镇内部交通间相互干扰加剧,导致安全问题日益突出。针对穿村镇路段内的复杂交通系统以及交通事故成因的复杂性,通过研究其主要致因因素,可以快速有效地制定合理的安全措施。
复杂交通系统的事故致因研究方法类别繁多。Kuhnert等[2]通过决策树中的CART算法分析得出受伤高风险族群;Savolainen 等[3]通过嵌套Logit回归模型分析与驾驶员伤亡程度显著相关的因素;夏萍萍等[4]基于负二项分布构建交通事故时空分析模型,研究得到事故率与路段弯曲比、坡度、大车比例等存在相关性;杨亚东[5]引入突变理论构建燕尾突变模型,认为防止系统控制点越过分歧点集曲面是预控道路事故的有效方法。上述研究方法能有效找出道路安全系统中各因素存在的缺陷,但是穿村镇路段改善资金有限、技术手段较弱,在相关安全改善措施实行时存在一定的难度。本文考虑从交通安全设施的手段入手,考虑使用设施来纠正人的不安全行为及车、路的不安全状态,以便于穿村镇路段的安全改善。关于国内外穿村镇路段的安全设施研究,Witheford[6]提出农村公路的长陡下坡路段存在的一些简易的避险车道及减速带有设置必要。Montella等[7]的研究结果表明减少撞击最有效的措施是曲线警告标志,并提出沿着曲线安装闪烁信号灯。李江海[8]认为高速公路穿越村镇路段必须要设置速度控制措施。上述文献都集中在研究各类安全设施的必要性上,但对于各类设施相互间重要性的对比研究较少。
本文考虑使用图形建模方法,将道路交通系统状态演变的过程描绘出来,用以分析系统中各要素的相互关系及重要度。Petri网作为一种描述分布式系统的模型,有直观、易懂和易用的优点,既能描述系统结构,又能模拟系统的运行[9]。在航空领域运用Petri网建立事故推演模型,可以分析飞行器事故致因[10]。将面向对象技术、分层机制等功能引入Petri网中,可清晰地描述不同层次、不同对象的交互和变化[11]。因此,本文提出了面向对象 Petri 网(object oriented petri nets,OOPN),依据驾驶状态演变构造出穿村镇路段交通系统OOPN模型并进行分析,研究穿村镇路段安全设施在事故状态演变中的作用。
1 Petri网基本概念
1.1 基本Petri网
基本Petri网指满足一定条件的三元组N=(P,T,F),其中P={p1,p2,…,pn}中的元素称为库所(Place),T={t1,t2,…,tm}中的元素称为变迁(Transition),F是网N的流关系(flow relation)。三组元素满足P∪T≠∅;P∩T=∅;F⊆(P×T)∪(T×P),即一个Petri网中,P和T不相交且不同时为空集,有向边F只存在于库所与变迁之间,任意库所间或变迁间都不存在流关系。在网中库所用“”表示,变迁用“”表示,“·ti”和“ti·”分别表示变迁ti的输入和输出库所集,“·pj”和“pj·”分别表示库所pj的输入输出变迁集。在Petri网所描述的系统中,库所与变迁间存在标识的移动,该标识称为托肯(token),用“•”表示,存放于库所的圆圈中,对于存在初始标识的库所,满足M0(p0)=1,随着变迁的发生,会使托肯在网络中发生移动,在基本Petri网上引入了标识,就得到了标识网(N,M)。
1.2 库所与变迁的关系
1.2.1 相邻库所与平行库所
tj为Petri网中的变迁,pl和pm为库所,若有pl∈·tj,pm∈tj·,则称pl和pm为相邻库所。如果满足pl∈·tj,pm∈·tj,则称pl和pm为平行库所。平行库所可能有多个。如图1,p0、p1、p2为平行库所,p0与p3、p1与p3、p2与p3均为相邻库所。

图1 相邻库所与平行库所Fig.1 Adjacent places and parallel places
1.2.2 状态演变
对于相邻库所,变迁的触发会使得托肯从变迁的输入库所移动到输出库所,满足:
M(pl)=0,pl∈·tj,
M(pl)=1,pl∈tj。
为了便于本文进行事故推演过程的研究,引入对于变迁的发生可信度的描述,用α(ti)表示,即变迁触发后托肯从输入库所移动到输出库所的概率;并且对于库所各类状态的描述,也存在不同的概率,用μ(pi)表示。
1.2.3 库所的并发性
在Petri网中,存在库所的并发,即表现为在某一变迁作用下,两类或多类状态都有发生权,而且任何一个的发生都不会使另一个失去发生权,如图2所示。库所p0在变迁t0的触发下产生了两种情态{p1,p2},t1发生后,t2仍有发生权,即t1和t2同时满足启动条件,该情态下处于并发。
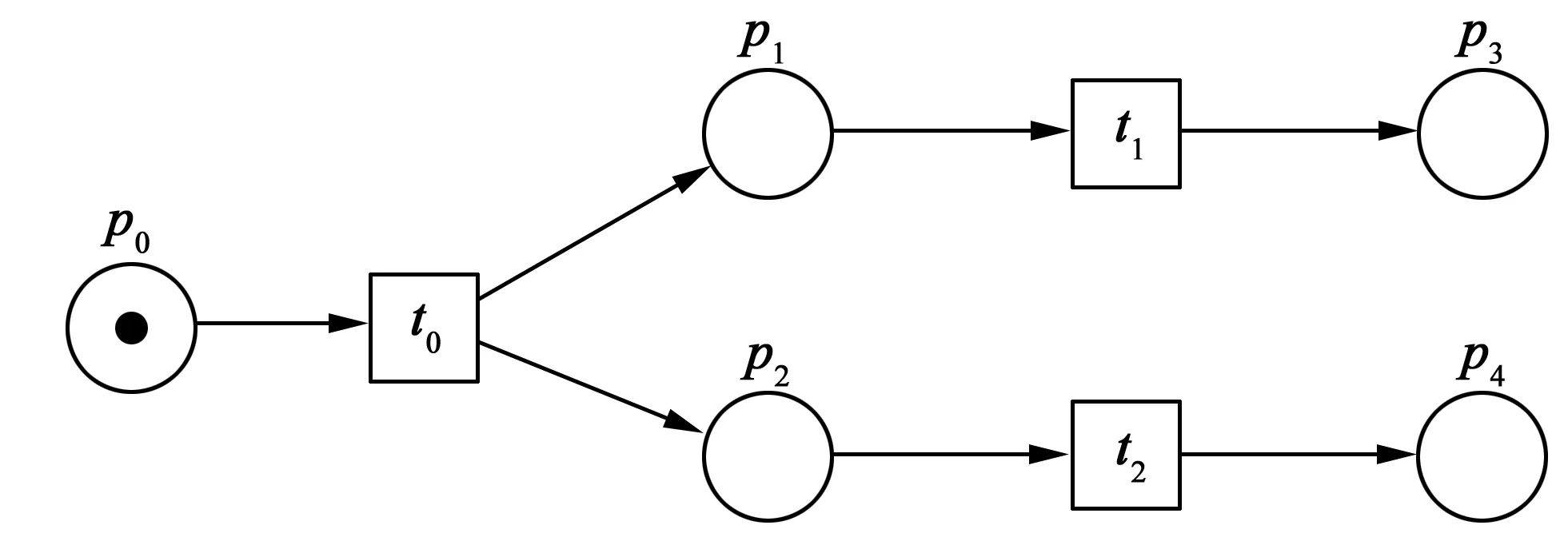
图2 库所的并发性Fig.2 The concurrency of places
1.2.4 变迁引发的冲突性
当某一库所存在两个(或多个)可以触发的变迁时,只有一个变迁能够引发托肯的移动,这种情况下即存在变迁引发的冲突性。如图3所示,t0和t1在{p0}状态下唯有一个可以触发,而具体是哪一变迁的发生决策由t0和t1的现状条件决定。变迁引发间存在的冲突性体现了系统状态演变的不确定性:在某种情况下存在两个(或多个)使状态改变的因子,但在实际运行过程中,只有一个触发因子能使状态发生变化。
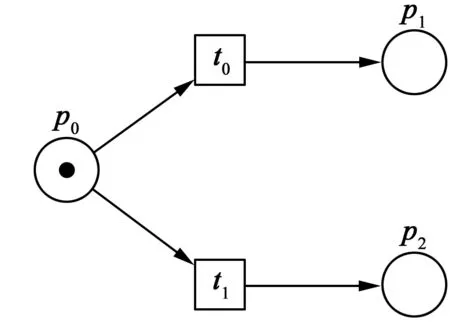
图3 变迁引发的冲突性Fig.3 The conflict triggered by transitions
2 穿村镇路段事故推演模型建立
2.1 建模要素确立
穿村镇路段和普通路段相比,主要安全隐患特点是存在大量交通干扰,包括村镇居民活动、非机动车等对通行交通的干扰,也包括过境交通与村镇内部交通之间的相互干扰。国内某些不发达的农村区域,在进行道路安全改善工作时经费有限制,导致部分路段的安全水平较低,威胁着当地居民的生命财产安全,对此类路段应该采取经济有效的安全措施。而交通安全设施可以起到主动引导驾驶员的驾驶状态变化、被动减小事故伤害程度、有效改善驾驶环境的作用,所以一般会选择在高风险路段设置合理有效的安全设施。本文希望通过建立的模型及有关数据,探究设施的重要度情况,在资金限制的情况下最大程度地改善穿村镇路段安全水平。基于穿村镇路段的安全隐患特点,本文主要探究安全设施在缓解多类交通干扰中起到的作用,所以构建模型时是以此为依据的。
文中采用浙江省丽水市三际线(X603)、双桂线(Y609)、安豫线(X103)、兰荒线(X401);江西省鹰潭市X323、X325、X326、X328、X329这几条低等级公路2012—2014年共计1032起事故数据,统计事故形态分布,具体结果见图4。
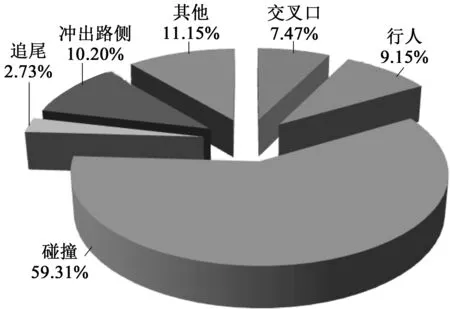
图4 事故形态统计图Fig.4 Statistical diagram of accident forms
从事故形态分布看,低等级公路中很大一部分为碰撞事故,而碰撞事故的产生一般由于驾驶员反应不及或速度过快导致。在这些事故中挑选多起村镇内发生的事故进行分析,得到事故发生地点多为村镇内交叉口处、行人过街处、村镇居民活动密切处,所以本文所建模型也将基于这几个事故多发点展开。
在OOPN中,用库所pi来描述系统中各对象状态,该状态存在的概率用μ(pi)表示,用变迁tj表示引起状态变化的要素,变迁发生的可信度用α(ti)表示。当变迁触发时引起托肯的移动,导致对象状态的改变。穿村镇路段事故推演模型中,起始库所为各对象要素处于正常状态,由于要研究的是交通事故发生的演变轨迹,故模型的目标库所为交通事故发生状况。利用OOPN,可建立起相应的穿村镇路段事故推演模型。
2.2 基于OOPN的建模过程
基于OOPN的建模方式结合了面向对象与Petri网的优点,可提高模型的模块性和柔性,能够较好地满足道路交通这种较为复杂系统的建模要求。在本文的研究中,主要希望建立事故推演模型,用以分析穿村镇路段上交通运行从安全状态到事故的系统演变轨迹 ,从而揭示各类交通安全设施的设置对事故的演变过程的作用。建立OOPN模型前首先应明确系统建模的用户需求,本文的目的是为了确定安全设施的作用,建模流程具体如下:
(1)明确系统中包含的对象,对于穿村镇路段的交通,主要对象包括过境车辆、村镇内部车辆、驾驶员、村镇居民、安全设施情况等;
(2)确定各对象间的相互关系,设施对车辆驾驶状态、居民出行状态的作用;
(3)在本次建模中,以路段上各关键点进行事故状态演变的推进,故需明确各节点范围内的状态演变流程;
(4)确立好上述关系后,利用OOPN语法进行说明,建立该系统的初始模型;
(5)不断探寻各对象及子系统间的交互作用,重复(2)的工作,进行模型的优化;
(6)利用Petri网绘制软件,根据可达性、结构、语法分析来评价模型完整性及正确性,通过分析结果判断模型的有效性;
(7)利用最终建好的模型探究交通事故的演变轨迹,结合设施有无对事故发生的作用概率及路径长短,进行某类设施的缺乏导致事故发生的可信度计算,找出更为重要的安全设施,并给出相应的提高系统安全性的改进措施。
3 模型建立及实例应用
3.1 模型建立
本次利用OOPN图建立模型,主要考虑交通安全设施在交通事故推演中的作用,所以为保障建模顺利,即每一设施存在与否产生的变迁都能触发托肯的移动,在建模前期需要假定所有的驾驶员对于设施都是遵循的态度,也就是排除了现实中某些冲动驾驶者的存在。
根据穿村镇路段存在的交通干扰属性,本次研究将即将进入村镇区域、交叉口(接入口)路段、行人过街路段、居民活动密切路段作为事故推演的4个事故节点,如图5所示,驾驶由A至D。构建的模型中,OOPN内的库所代表的是车辆驾驶状态、行人出行状态、居民活动状态、事故发生状态等,变迁代表的是设施的有无、路段干扰的出现等,基于此,绘制的OOPN模型如图6所示,其中库所和变迁的含义见表1和表2。

图5 事故推演节点图Fig. 5 Nodes diagram of accident deduction

图6 穿村镇路段OOPN事故推演模型图Fig. 6 OOPN accident deduction model of highway segments passing through villages

编号含义编号含义编号含义p0过境交通正常驾驶p9支路交通正常驾驶p18村镇居民随意通过马路p1过境交通减速行驶p10交叉口前减速行驶p19村镇居民活动p2过境交通保持(加)速行驶p11交叉口前减速行驶p20村镇居民活动不干扰主路交通p3交叉口前减速行驶p12交叉口前保持(加)速行驶p21村镇居民活动影响主路交通p4交叉口前保持(加)速行驶p13交叉口前保持(加)速行驶p22过境驾驶员不占用对向车道p5过境交通状态正常p14行人过街前减速行驶p23过境驾驶员占用对向车道p6交叉口前减速行驶p15行人过街前保持(加)速行驶p24发生交通事故p7交叉口前保持(加)速行驶p16村镇居民准备过马路p25交通状态正常p8发生交通事故p17村镇居民有序通过马路
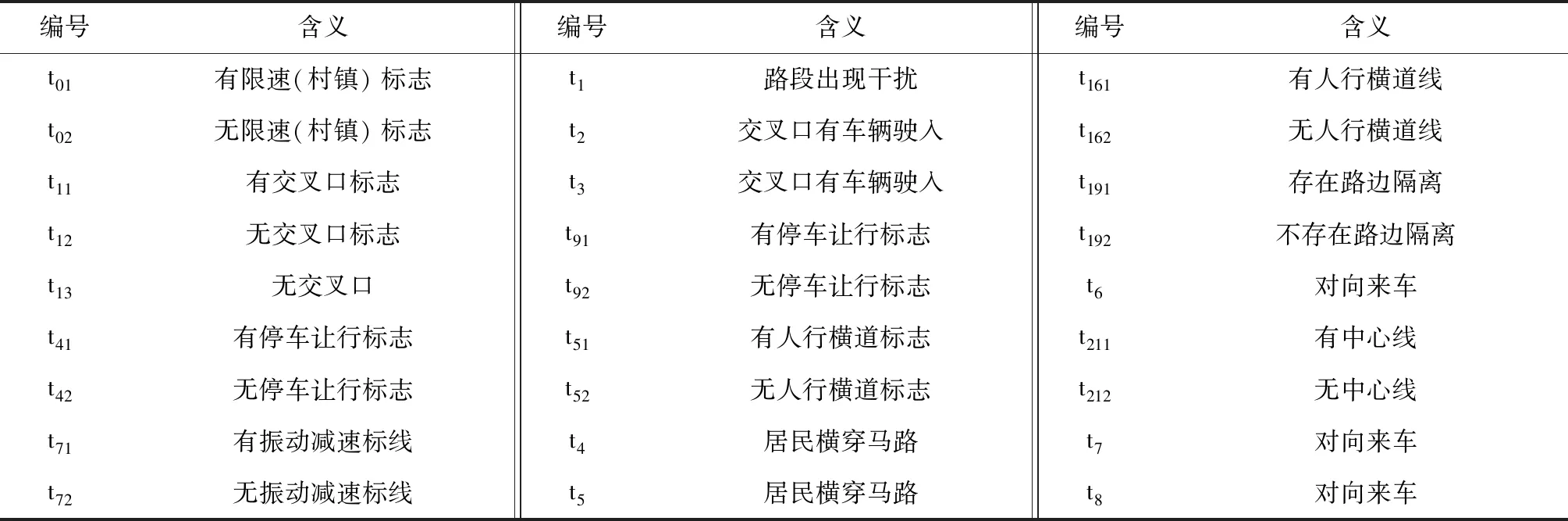
表2 变迁含义表
根据绘制的面向对象Petri网图,可以明确导致最终事故发生的演变路径很多,事故的最终发生与否是由多个对象的共同作用所导致的。在事故演变过程中,有些设施间的作用是平等的,是可以相互替代的,如在B区域(交叉口(接入口)路段),在t12(未设置交叉口标志)变迁下,如有效实施t41(设置停车让行标志)变迁,产生的效果将与t21(设有交叉口标志)变迁所带来的演变一致,即使得演变方向朝着安全方向发展。故一定情况下,设置交叉口标志和停车让行标志作用是平等的,所以在实际中仅需设置一个即可,一般对交通量较小的路段设置停车让行标志,用以保证主路交通的运行效率。还有的设施间的作用是相互依存的,如在C区域(行人过街路段),如若不利用t161(设置人行横道线)变迁首先规范行人的过街点,则t91(设置人行横道线标志)变迁是没有存在意义的;相应的,仅有t161对驾驶员无法起到警示作用,同样可能导致事故的产生。同样的,可利用该模型定性分析其他设施在事故推演中的作用方式及相互关系。
对同一库所若存在多个变迁,则各变迁之间相互矛盾,托肯的移动只能在一个变迁下发生,所以某一个设施的存在与否都会最终导致事故状态的差异,而通过路径的长短以及可信度的大小来判断对事故影响最大的设施,是本文建立该模型进行定量分析的目的。
首先定义αi表示pi库所所处状态的真实度,λj指变迁tj发生的可能性,μj指变迁tj引发托肯移动的可能性,M(pi)指库所pi内的托肯值。在所建模型中,存在四个初始库所,依次为p0、p9、p16、p19,认为初始库所真实度为1,初始状态下初始库所托肯值为1,再依据初始库所后续变迁的发生可能性以及变迁引发托肯移动的可能性,如对于库所p0,t01的发生可能性指在穿村镇路段内设有限速(村镇)标志的概率,t01引发托肯移动的可能性指设有限速(村镇)标志后,驾驶员会选择减速驾驶的概率,当变迁触发后引发了下一库所,则托肯移至下一库所,顺着单一路径方向计算并更新下一库所产生概率,最终指向目标库所事故发生与否,得到在某一路径下的事故发生概率与设施存在情况的关系。通过找出导致事故产生的最大概率值,寻找出相应路径,在该路径上的设施则认为是影响事故发生的主要设施,在考虑设置设施时优先考虑此类设施。
3.2 实例应用
本文所研究的实例数据主要来源于北京市门头沟区G109路及浙江省丽水市遂昌县X603路的实际调研数据,以及国内部分省市低等级公路设施记录数据。要将本模型应用到实例中,首先需要获取相关概率数据。
3.2.1 驾驶员对设施的遵从概率
研究数据来源于G109路所跨越的军庄镇、下苇甸镇、雁翅镇、斋堂镇、清水镇以及X603路所跨越的好川村、永安小区、排前村共计8个村镇的调研情况。
通过在设施前后安排人员使用测速枪进行测速,观察驾驶员在设施前后的速度变化来判断驾驶员是否遵从降速类设施,通过多时段多地区调研,计算整体中的采取减速的驾驶员数量占总数的比率,从而获得概率大小;对于非降速类设施,通过视频调研获取相关数据计算驾驶员对设施的遵从率。在此以降速类设施和非降速类设施分别举例介绍概率获取方式。其中路边隔离设施认为存在即可以阻止路侧干扰,故遵从率为1。
(1)限速标志或村镇标志
通过对车辆驶过限速标志(村镇标志)前后的速度情况进行测量,计算得到限速标志(村镇标志)的遵从概率为0.83,具体调研结果见表3。
(2)人行横道标志及标线
为获取对人行横道标志标线的遵从概率,分别对仅含人行横道标线以及同时包含人行横道标志标线的位置进行测速。选择村镇居民出行较频繁的时间点进行速度测量,测量时间为 0.5 h,各点均测量两个时间段,测量期间若人行横道及其附近没有行人时不测量经过车辆速度。根据调研结果,得到同时有人行横道标志和标线设施的位置处驾驶员减速概率为0.94,仅含人行横道标线处驾驶员减速概率也为0.94。一般来说,人行横道标志的存在能起到提前提醒驾驶员减速的效果,所以设置同时设置标志标线安全性理应高于仅设置标线,但此处以调研实际结果作为实例应用的概率值。具体调研结果见表3。

表3 调研各点减速情况统计表
(3)中心线
由于村镇内经常出现单黄实线和单黄虚线交替出现的情况,所以此处中心线考虑的是包括实险和虚线在内的道路中心线。对道路中心线的遵从概率统计是通过视频数据进行统计的,具体统计结果见表4。

表4 压中心线车辆统计情况Table 4 Statistics of vehicle press centerline
3.2.2 设施不存在时行为实施概率
本部分研究数据来源包括前述8个村镇的调研以及论文所依附项目采集的穿村镇公路的道路基础设施条件数据。
当路段内不存在某些安全设施时,驾驶状态会朝着另一方向(不安全方向)演变,此时也存在着相应的概率。对于此概率的获取,是通过调研路段的相应数据测量进行确定的。其中限速标志和振动减速标线都属于提醒了驾驶员减速,驾驶员才会考虑减速,当设施不存在时,认为驾驶员不减速的比率为1,即使驾驶员采取了减速也是结合环境采取的驾驶行为,与安全设施无关。
(1)交叉口标志及停车让行标志
由于交叉口标志和停车让行标志都位于交叉口或者接入口处,所以两类标志不存在时,驾驶员不减速的概率可视为相同,此处的概率计算通过在无任何指示标志的交叉口(接入口)区域内和交叉口(接入口)区域外进行速度测量,统计驾驶员的减速情况。此处选取了两个交叉口和两个接入口进行减速情况统计,调研时间为0.5 h,各点均调研两个时间段,调研结果如表5所示。最终计算得到无任何指示标志的交叉口或接入口区域内驾驶员选择了减速的比率均值为0.25,则未减速甚至加速的比率为0.75。
(2)人行横道标线及人行横道标志
人行横道一般施画于人流集中以及交叉口(接入口)区域,人流集中区域包括商铺、学校,由于本文调研范围内没有教育用地,且商铺在村镇内分布较分散,没有合适的选点,故仅考虑交叉口(接入口)区域的人行横道标线不存在时驾驶员的状态,由于表5数据测量所使用的交叉口(接入口)均无人行横道,故在此处可延用表5的计算结果即为0.75。
由于人行横道标志是依附于人行横道标线而存在的,所以无人行横道标志存在两种情况,通过测量无法获得所需关于标志的概率。考虑存在无标志但有标线的情况,所以认为驾驶员在无人行横道标志下不减速的概率小于无人行横道标线下不减速的概率,在模型中假设该概率略小于人行横道标线结果,取0.70。

表5 交叉口(接入口)减速情况统计表
(3)路边隔离
关于路边隔离,由于不便统计穿村镇路段车道被居民活动占用的概率,考虑居民活动包括商贩、三轮、摩托、居民外出等占用公路行车道,结合国内现状,估计了一个较高的概率值0.6,以提高模型计算的“容错”空间。
(4)中心线
由于调研村镇范围内均有道路中心线,此处中心线不存在的案例选取了贵州省安顺市某无道路中心线县道,通过观测调研视频,在人流较大的村镇内,视频中共记录了126辆过路车辆,其中压过道路中央伸缩缝行驶的车辆共计113辆,则取0.90记为无道路中心线时车辆占用对向车道的概率。
3.2.3 设施有无概率
关于国内穿村镇路段内是否安装各类设施的比率,来源于本文所依附项目在前期采集的穿村镇公路的道路基础设施条件数据,通过抽样选取安徽、云南、浙江等11个省份的22条低等级公路,用于本文的数据统计,样本公路共计851.7 km,其中13.04%的路段为穿村镇路段,共计68个村镇。下述为各类设施存在概率的统计情况。
(1)限速标志(村镇标志):村镇范围内含限速标志占比89.7%;
(2)交叉口标志:交叉口标志存在概率为69.92%;
(3)停车让行标志:停车让行标志的存在概率为79.76%;
(4)振动减速标线:振动标线的存在概率为55.15%;
(5)人行横道标线:人行横道设施占比60.35%;
(6)人行横道标志:人行横道标志存在的概率为55.21%;
(7)路边隔离:在所有的68个村镇中,存在路边隔离的村镇共计24个,其中路边隔离包括路侧连续示警桩、路侧连续大石、路侧绿化带、隔离栅栏等,故路边隔离存在概率为35.29%;
(8)中心线:道路中心线占比98.02%。
综上所述概率,得到整体的概率分布统计表见表6。

表6 概率分布表
对于其余村镇内居民出行或交通干扰引发的变迁,如t13、t1、t2、t3、t4、t5、t6、t7、t8发生的可能性以0.5计,即考虑其发生与否等比例出现,该变迁引发托肯移动的可能性定为1,因为该类变迁可认为只是为事故的演变提供干扰对象,而影响事故演变路径的关键因素是设施的存在与否,所以此类变迁不改变演变路径。
基于上述数据,可进行各引向事故的演变路径概率的计算,从模型中可以看出,能引向事故的路径共有7条,分别是(i)p0→t02→p2→t1→p8;(ii)p0→t01→p1→t12→p4→t3→p8;(iii)p0→t01→p1→t12→p4→t42→p7→t3→p8;(iv)p0→t01→p1→t12→p4→t42→p7→t72→p13→t3→p8;(v)p9→t92→p12→t3→p8;(vi)p16→t162→p18→t52→p15→t5→p24;(vii)p19→t192→p21→t212→p23→t8→p24;计算对应事故概率值为0.05、0.084、0.038、0.006、0.075、0.047、0.003 5,第2条路径产生最大事故概率值,即在交叉口前交叉口标志的缺失最易引起事故的产生。还有支路上的停车让行标志、进入村镇前的限速标志和居民过街集中区域的人行横道标线,此类设施缺失时事故发生概率较大。所以在对穿村镇路段进行安全完善时,首先要考虑在接入口(交叉口)前设置交叉口标志,交叉口对应支路路段上设置停车让行标志,对于路段没有交叉口时,就应首要考虑进入村镇前设置限速标志,并且在居民过街的区域设置人行横道线。通过上述对路径概率的计算,确定了在穿村镇路段应该优先设置的是上述设施。穿村镇路段交叉口事故高发的实际情况,验证了该模型的合理性。
4 结论
本研究依据所绘制的OOPN事故推演模型图,得到如下结论:(1)各类设施在事故演变中的相互作用关系有所不同,存在平等作用,也存在相互依存的作用;(2)在确定的演变路径下,可计算得到最终事故发生与否的概率值;(3)在获取各路径下事故发生的概率值后,找出最大概率所在路径,该路径上涉及的设施为主要设施,在进行道路安全完善时应优先使用。本文实例应用部分得出主要设施包括交叉口前交叉口标志、支路上的停车让行标志、进入村镇路段前限速标志以及居民过街集中区域的人行横道标线。
本文存在的不足包括:(1)有部分数据是通过假定和经验所获取的,存在一定的局限性;(2)对于模型的定量计算可设计相应的算法进行快速计算,提高效率。
利用面向对象的Petri网建模的方法不仅限于使用在穿村镇路段上,也可以用于其他多种类别的道路事故的推演,如城市道路事故、高速公路事故、高等级公路事故等。并且不仅局限于道路安全设施作用的分析,也可以拓展到人-车-路整个系统的事故推演分析。因为各类道路上发生的事故演变途径都是可知的,通过分析道路交通事故,在基于Petri网的事故推演建模中,将事故演变过程中涉及的各类因素分布到Petri网中表现出来,可以减少主观分析时产生的缺漏,发现潜在的风险隐患,减少事故发生的可能性。扩大事故推演模型的使用范围,是未来的研究方向。
