一种多频段雷达干扰模拟系统仿真设计
2019-04-11杨文倩邓龙波
杨文倩 张 炫 高 剑 邓龙波
(西安电子工程研究所 西安 710100 )
0 引言
近年来,随着宽频带高性能射频前端、数字波形产生、数字化接收机以及高性能实时计算等技术的飞速发展,雷达系统自由度、计算能力以及软件化编程能力得到了大幅度提高,使得雷达系统的灵活性增强,在功能和性能方面得到很大的提升[1];另一方面战场信号环境和作战对象的复杂变化也使得雷达对抗装备的具体应用存在变化。由于雷达对抗装备对环境的依赖性和现代战场电磁信号环境的复杂多变性,仅仅依靠有限的实战演习是很难完成对雷达对抗系统装备的实际作战效能和各种装备平台之间的联合作战能力的综合评判[3]。而模拟器作为雷达模拟技术的重要应用领城之一,以其灵活多变、可重复利用、安全经济的特点得到快速发展,被广泛应用[4]。
1 基本原理
该模拟系统综合运用可配置数字基带波形生成技术、多频段捷变上变频技术、多通道接收处理技术实现雷达系统模拟,通过内场注入方式开展对抗/反对抗仿真试验。
注入式模拟采用参数化、模块化思路,完成目标雷达与模拟目标的建模并与待测电子干扰装备进行参数关联,明确目标雷达、模拟目标与电子干扰装备的相对位置及状态信息,采用灵活可配置的数字波形生成技术,实时计算并通过DDS+D/A方式产生雷达发射基带信号,经过P、S、Ku波段3个射频通道上变频放大后进行射频输出;输出的雷达发射射频信号提供给电子干扰装备用于信号侦察,生成的目标回波/杂波射频信号和电子干扰装备产生的干扰射频信号进行接收调制及合路处理后注入相应的雷达模拟系统接收通道;雷达模拟系统真实模拟各目标雷达接收处理通道,分别对来自3个频段的注入信号进行下变频接收处理,而后通过AD采样单元对接收机输出中频信号进行采样,并由通用服务器架构的信号处理机和数据处理器进行处理,最终输出至雷达显控界面进行显示。
系统基本工作原理如图1所示。
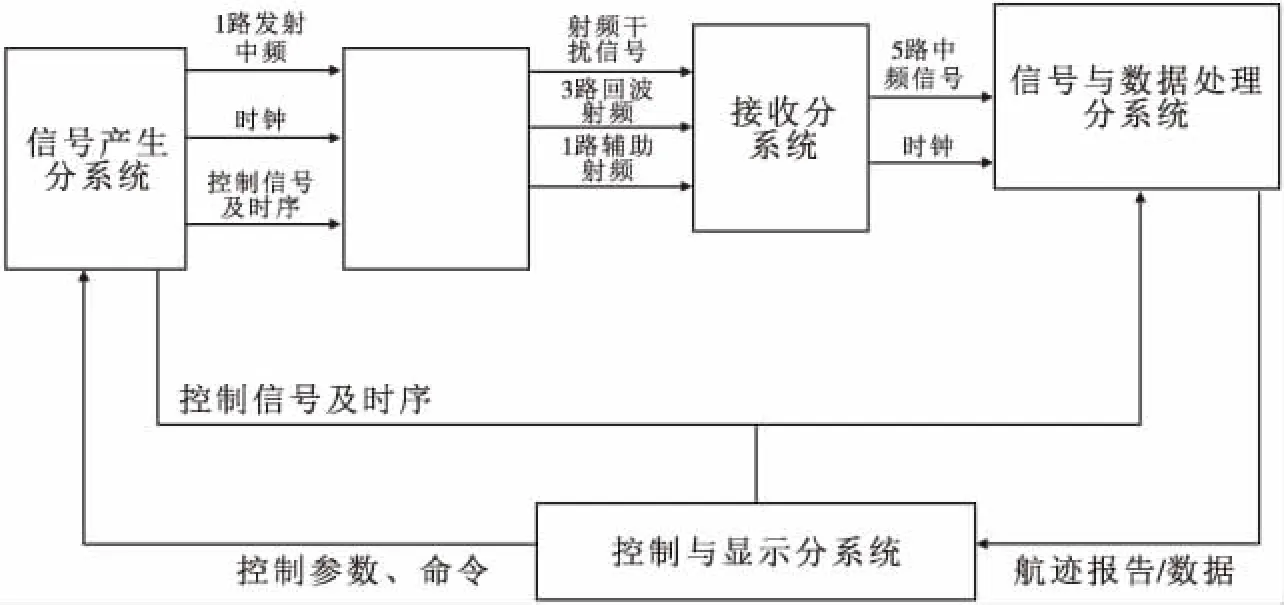
图1 雷达模拟系统基本工作原理
2 雷达模拟系统的组成
雷达模拟系统按功能区分主要有信号产生分系统、信号与数据处理分系统、控制与显示分系统三个分系统。
1)信号产生分系统
信号产生分系统通过单板计算机和相关软件实现,在信号发射时根据雷达发射信号参数、工作时序等信息产生所需的基带信号,用于模拟产生目标运动、战场环境、杂波干扰等信号。
2)信号与数据处理分系统
信号与数据处理分系统中,由信号采集板中AD采样电路接收中频回波信号,完成一系列信号处理流程,最终完成目标检测并输出目标点迹报告,并且在检测概率上达到与实际雷达一致或接近的效果,正确模拟出雷达被干扰的现象。数据处理软件根据系统时钟和处理周期进行点迹凝聚、杂波处理和航迹相关,完成雷达航迹处理,建立目标批号、运动参数、威胁系数、航迹质量等,并将处理结果送至控制与显示分系统。
3)控制与显示分系统
控制与显示控制分系统通过系统软件、系统控制与管理终端、雷达综合显控终端对系统进行参数配置、资源管理和状态显示。可实现雷达信息综合显示,具备雷达控制命令产生功能,可通过界面设置雷达的工作模式、工作参数并显示雷达工作状态等,用于雷达数据的显示与人机交互。
3 关键技术
3.1 多通道仿真数据与D/A信号同步技术
3.1.1 同步技术设计
系统多通道DA输出之间要求同步,即各DA通道从不同的存储模块读取数据,然后进行相应的处理后进行同步DA转换。不但要保证各个DA同步,还要求不同通道的数据同步。系统同步设计的基本思想如图2所示,首先要保证整个系统共时基,其次要保证整个系统共同步触发,同时要保证整个系统共本振,这样即可实现整个系统多个通道之间同步。
实测结果如图3所示,从图中可以看到示波器的采样速率为25GSPS,时间刻度每大格为2ns,每小格为0.4ns,测试结果表明,同步精度优于80ps。

图2 系统同步示意图
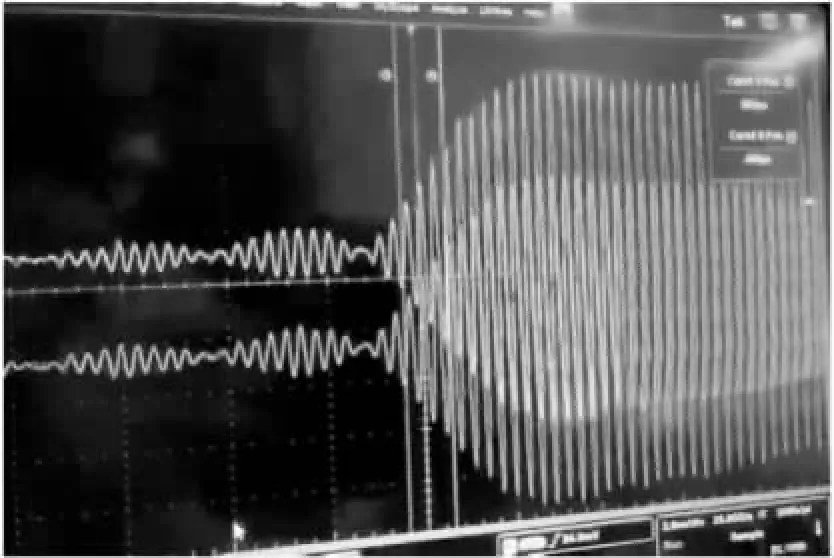
图3 同步时序实测数据图
3.1.2 DA同步
DA同步要求各通道DA转换器之间保持同步,高速DA转换器使用JESD204B串行接口简化了同步过程。在一个JESD204B系统中,同步可以分为下面三个基本要求:
1)每个数据转换器之间器件时钟要求相位对齐。器件时钟作为数据转换器的采样时钟或者参考时钟依赖于时钟分配延时控制,器件时钟采用输入时钟经过一个时钟缓冲后送给各个转换器和逻辑器件,各路时钟保持等长来进行相位控制。
2)选择合适的缓冲器释放点来保证确定性延迟。弹性缓冲器抵消串行数据从发送端到接收端的传输延迟,提供足够的余量。选择一个合适的弹性缓冲器要求已知数据到达弹性缓冲器的平均时间和所有器件总的期望延迟,关键点是要保证所有LANE线上的数据到达所有器件在弹性缓冲器释放点满足之前,如图4所示。

图4 弹性缓冲器释放点选择示意图
3)每个数据转换器和逻辑器件的系统参考时钟相对器件时钟满足建立/保持时间要求。
系统参考时钟信号是实现可重复系统延迟和同步的最重要信号。系统参考时钟信号的频率选择有一定的限制,信号频率等于或者是LMFC的整数分频。应满足公式(1):
(1)
式(1)中fBITRATE是串行接口的位速率,F是每一帧的字节数,K是每个多帧块的帧数,n是任何整数。但是每个器件都一个K值设置的限制满足17≤F×K≤1024。
最简单实现系统参考时钟信号建立/保持时间要求的方案是使用同一个器件来实现器件时钟和系统参考时钟。在各种条件下不同输出之间保持严格的相位关系,图5是使用TI LMK04828实现的器件时钟和系统参考时钟的典型JESD204B时钟方案。

图5 典型JESD204B时钟方案
3.2 基于通用信号处理平台的软件化雷达技术
本雷达模拟系统采用了通用信号处理平台来完成数字信号处理部分的真实模拟,该通用信号处理平台运用软件化雷达开发技术,可以有效地提高雷达信号处理系统软件的通用性、可移植性和适用性。
雷达回波信号生成的过程如图6所示,将仿真时间按照雷达的基带信号采样间隔TS进行离散,则在每个TS时刻,通过计算或记录当前时刻的回波信号强度Ar、时延Δr、多普勒频率ωc、信号载频ω0、雷达与目标的径向距离r以及雷达波形等参数即可合成基带雷达回波,见公式(2):
SRx(t)=Ar(t)S0(t-Δr(t))exp(j(ωct-kr(t)+φ0))
(2)
其中,回波信号强度Ar由雷达仿真计算得到,SO(t)为基带信号波形,k为波数,φ0为信号的初始相位。通过公式(2)可以发现,雷达回波信号的变化其实是由场景的变化驱动的,因此只要能够明确描述场景的变化,即可得到准确的雷达回波信号。
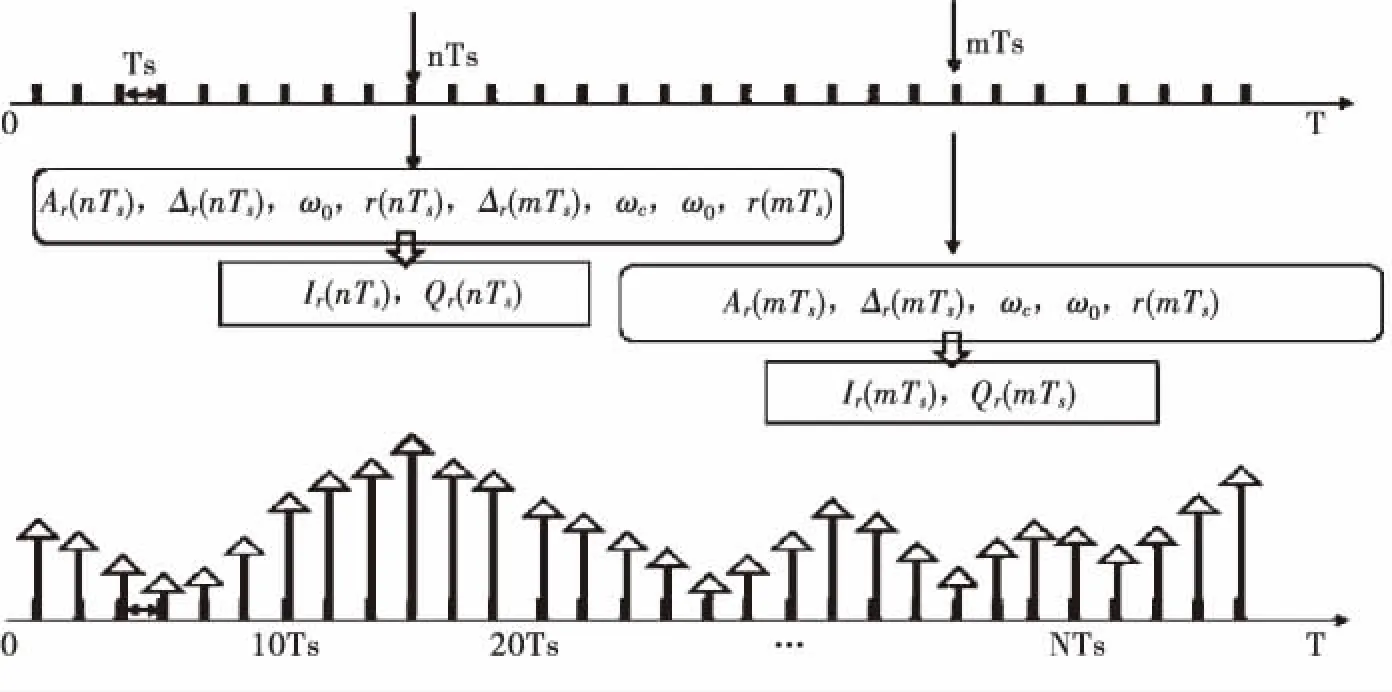
图6 雷达回波信号离散时间示意
在数字化动态仿真系统中,需要定义场景仿真的步长Tn,即场景刷新的时间间隔,将雷达的每个重复周期PRI设置为仿真步长,即令Tn=PRI。如下图所示,以水平光栅扫描的雷达为例,在每个Tn或PRI,软件都会计算或记录当前时间点的场景状态参数,那么在该仿真步长内,仍然将回波信号按照TS进行离散,并由公式(2)求得。需要注意的是,这里假定在每个重复周期PRI内,雷达的发射功率、信号波形,雷达天线的姿态、矢量速度和天线波束指向,目标的姿态和矢量速度等均不发生变化,场景中的运动实体会按照当前的速度进行匀速直线运动,直到下一个仿真步长,那么在该仿真步长内雷达和目标仍将保持运动状态,使得整个回波生成的过程都是动态连续的。
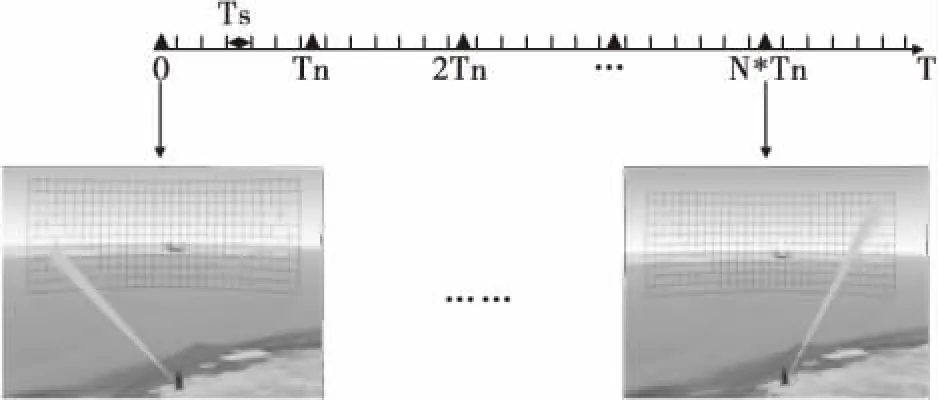
图7 雷达回波信号生成关系示意
4 结束语
文中提出一种多频段雷达模拟系统的设计方法,该模拟可实现目标雷达的基本功能,可检验鉴定目标雷达干扰机的干扰效果,但原理和结构简单,制造成本低。该模拟系统可在数字域将各种复杂场景进行仿真,场景模拟的复杂度高;该模拟系统提出的数字仿真方案使系统部署更加灵活;该模拟系统可在数字域自动进行校准数据采集和校准结果更新,使系统维护校准更方便。该雷达模拟系统在保证效果的基础上极大地降低了日常消耗,可节约大量的军事训练经费,具有广泛的推广应用前景。
