雪车、雪橇项目特征分析
2019-04-08李钊,李庆
李 钊,李 庆
(清华大学 体育部,北京100084)
1 前言
雪车项目分为有舵雪橇(bobsleigh)与无舵雪橇(luge),两个大项分别于 1924年、1964年成为冬季奥运会比赛项目。相比于世界雪车项目强国(德国、加拿大、瑞士等),我国雪车项目起步较晚,国家体育总局冬季运动管理中心于2015年成立了雪车雪橇部,采用“跨项选材”方式组建了中国雪车雪橇队。
2022年,北京冬季奥运会的举办为我国雪车(橇)项目的发展的提供了历史机遇,同时也提出了诸多挑战。一方面,主办国的优势因素(场地、气候、观众等)在一定程度上有利于运动成绩的提高;另一方面,作为新兴的运动项目,我国整体上还缺乏对该项目训练特征与训练规律的理解与把握,这极大地制约了训练水平的快速提高。
以运动项目的专项特征作为运动训练的基础和依据,已经成为当前世界竞技体育训练的一个显著标志和发展趋势(陈小平,2008)45-59。因此,只有通过科学的归纳与分析雪车(橇)的项目特征,才能准确地把握训练的方向以及提高训练效率,同时也是我国实现该项目从刚刚组队到跨越式发展的重要途径。为此,本文将系统梳理雪车(橇)项目的理论研究成果,进一步提炼项目的本质特征,总结训练规律,以期提高该项目在我国的训练水平。
2 世界雪车(橇)项目的竞争格局
国际雪橇联合会(International Bobsleigh and Tobogganing Federation,FIBT)最初于 1923年 11月 23日在法国巴黎成立,之后于 2015年 6月在比利时根特更名为国际雪车(橇)联合会(International Bobsleigh and Skeleton Federation,IBSF)。目前,雪车(橇)联合会负责管理的项目有钢架雪车(男子单人、女子单人)、有舵雪橇(男子双人、男子4人、女子双人)两个大项。
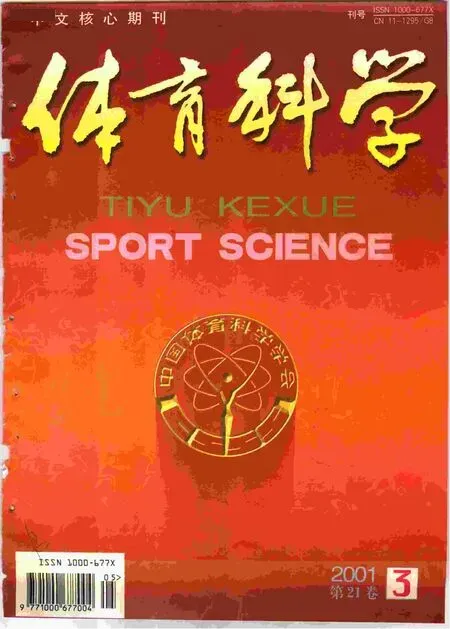
通过对历年(1924-2018年)冬季奥运会雪车(橇)项目获得奖牌国家进行统计(图 1),可以看出,德国、美国、瑞士是世界雪车(橇)项目强国。从整个发展历程来看,德国钢架雪车虽然在奥运会上还未获得过金牌,但其有舵雪橇项目崛起于20世纪70年代,在1972-1988年5届冬奥会中,东、西德的金牌数量占项目总金牌数的3/5,奖牌数量占总奖牌数的1/2以上。在2002-2010年3届奥运会上,德国无论在金牌数量还是奖牌数量上依旧表现强势。在2018年平昌冬奥会上,德国共获得3枚金牌、2枚银牌,分别占总金牌数量的 3/5,总奖牌数量的 1/3。美国虽然是该项目的实力强国,但钢架雪车项目在 2006-2018年 4届奥运会中只获得了 1枚银牌、1枚铜牌。有舵雪橇项目在 2002-2018年 5届冬奥会上的表现并不稳定,如2002年以东道主举办的盐湖城奥运会上获得了3枚金牌、2枚银牌、1枚铜牌,而2018年冬奥会上只取得了1枚银牌。瑞士在钢架雪车项目上的表现也差强人意,在1956年冬奥会上获得过1枚金牌和1枚铜牌,在1932-2006年期间,其奖牌数量基本维持在前3名,但在近3届冬奥会上,瑞士只获得了1枚银牌,同样表现出了成绩的不稳定性。
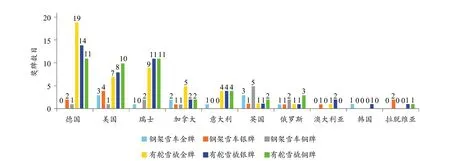
图1 1924-2018年冬季奥运会奖牌前10名国家及奖牌数目Figure 1. Top 10 Countries and Medal Distributions of Winter Olympic Games from 1924 to 2018
尽管成绩的不稳定性是由多种影响因素造成的,但究其原因主要表现在以下两个方面:1)世界各国都积极参与到雪车(橇)项目上,加剧了该项目竞争的激烈程度;2)举办国有更多的机会进行实际比赛场地的适应性训练,增加了运动员获得优异运动成绩的可能性。
3 技术
在雪车(橇)项目的运动训练实践中,根据比赛不同阶段的运动学特征,将其分为加速阶段与滑行阶段。其中加速阶段一般为比赛的前30 m,运动员在该阶段通过快速启动加速,使“人-车”达到最大速度以跳上雪车(橇);滑行阶段通常指运动员跳上雪车(橇)后至比赛的终点,运动员在这一阶段通常要调整车(橇)方向,以避免速度的过多损失。有研究表明,男、女运动员推车加速阶段的成绩与最终成绩呈显著相关关系(r=0.48、0.63,P<0.05),男、女运动员推车加速阶段成绩对于总成绩的贡献度分别为 23%、40%;与预赛推车阶段以及预赛成绩相比,决赛推车阶段的成绩变化量与决赛成绩变化量之间没有显著相关关系(Zhang et al.,1995)。同样,对于雪橇项目而言,最终成绩并不仅仅是由推橇加速阶段成绩决定的,而是由推橇加速阶段与滑行阶段共同影响的(Bruggemann et al.,1997)。
由于加速和滑行阶段与比赛成绩显著相关,Roberts(2013)进一步将这两个阶段划分为4个部分:1)预备姿势;2)推车加速;3)跳上雪车;4)滑行(图2)。4个部分所反映出的关键技术环节主要包括推车手臂技术、步长与步频、起跳技术以及滑行技术。

图2 钢架雪车技术的四个部分Figure 2. Four Parts of the Skeleton Technique
3.1 手臂技术
当前世界各国运动员在推车技术上存在一定的差异,主要表现在加速阶段的单手与双手推车。Bullock等(2008)研究表明,2005-2006年世界杯的 3场比赛中大约有40%~60%的优秀女运动员使用双手推车技术,但是每一场比赛中启动加速最快的选手都采用单手推车技术,双手推车技术主要集中在启动加速较慢的选手中。
尽管当前单手推车技术是一种主流的技术,但是单手推车与双手推车各具有自身的特点。运动员在单手推车时身体更加灵活,蹬伸更加充分,从而使每一次的蹬伸力度更大,加速度更大。双手推车属于传统技术,表现更加稳定,失误率较低,但该技术由于要求运动员脊柱向前弯曲,因此,制约了推车的加速。如果运动员的推车加速技术不够稳定,同时又具备良好的手臂长度以及背部柔韧性,也可以考虑使用双手推车技术。
3.2 步长与步频
鉴于雪车(橇)项目的外在动作特征,当前世界跨项选材主要来自于短跑与跳远项目的运动员。众所周知,单位时间内的位移与频率决定了周期类竞速项目运动员的速度能力。在 100 m的比赛中,人体的供能特点与项目特征决定了运动员在不同阶段的步长与步频应具有不同的最佳组合,以达到能量供应的节省化。短跑与跳远项目的加速阶段与推车(橇)阶段既存在共性特征,也存在差异性区别。共性特征方面主要表现在通过腿部快速蹬伸使身体快速加速以达到最高速度。差异性区别方面主要表现在以下两个方面:1)整个推车(橇)加速阶段要求运动员保持特定的身体高度,而短跑运动员在加速阶段逐渐抬起身体重心;2)雪车(橇)运动员在加速阶段单侧或者双侧手臂始终处于推车(橇)状态,而短跑运动员则通过双臂前后摆动来跑动前进。Mosey(2014)研究了短跑与雪车在加速阶段的运动学特征(表 1),认为两个项目在加速阶段的步频与触地时间没有差异,推车导致了步长小于短跑加速阶段的步长。

表1 短跑加速、最高速度阶段与雪车加速阶段运动学特征Table 1 Kinematic Characteristics of Sprint Acceleration, Maximal Speed and Skeleton Acceleration
Colyer等(2017)研究了英国12名高水平钢架雪车运动员(6男、6女,其中4名运动员获得过世界大赛奖牌,3名运动员进入世界前 20)在陆地与冰道启动加速阶段的运动学特征,从表 2可以看出,运动员在德国 Winterberg赛道推车阶段的步频显著高于陆地推车,在德车 Altenberg赛道推车阶段步数显著高于陆地推车。与陆地赛道相比,实际比赛赛道启动加速阶段通常具有2%的下坡坡度,该坡度提高了运动员的步频。

表2 陆地推车、Winterberg赛道推车和Altenberg赛道推车阶段时空特征对比Table 2 Comparison of Push Phase Kinematic Characteristics in Dry-land, Winterberg and Altenberg track
Ian(2012)研究认为,速度的提高主要依赖于步长的增加,而Mero等(1985)则认为,速度主要受到步频因素的影响。在雪车(橇)训练的实践中,我们更应关注步长还是步频主要取决于该项目的能量代谢与项目本质特征。在雪车(橇)的加速阶段,运动员通常需要从静止状态快速蹬伸,尽可能在短的时间内达到最大速度,这一段时间通常持续 5 s左右,因此,启动加速推车阶段人体供能特征属于典型的无氧磷酸盐系统供能。在如此短的时间内达到最高速度显然应该以增加步频为主,其原因主要有以下3个方面:1)运动员启动加速阶段俯身推车制约了运动员步长的增大,增大步长只会增加运动员着地的制动力;2)世界优秀雪车运动员在加速阶段的步频已经接近于世界优秀短跑运动员的步频(约 4.52 Hz),而步长却远远落后于世界优秀短跑运动员的步长(表 1);3)短跑运动员加速阶段强调重视步长的增加,原因主要是对于后程的速度以及节奏有重要意义,这一点与启动推车存在着本质上的区别。因此,在启动加速阶段我们应该尽可能地提高运动员的步频来快速提高速度。
3.3 起跳技术
起跳技术是运动员从推车(橇)加速阶段向滑行阶段过渡的一项关键技术,较好的起跳技术可以让运动员在不损失车(橇)速度的基础上进入赛道滑行。Colyer等(2015)通过将电磁编码器安装在车轮上,记录了13名世界高水平钢架雪车运动员在启动加速阶段跳上雪车的前、后速度,由此提出了跳车效率问题(图 3)。基于该项研究,Colyer等(2018)在另外一项研究中讨论了不同加速距离(短距离、习惯性距离、长距离)对于跳车效率的影响,研究结果认为:1)加速距离越长,跳上雪车前的速度越大,加速距离越短,跳上雪车前的速度越小,习惯性距离则处于两者之间;2)加速距离、推车速度的增加与上车后速度下降的相关性为 r=0.52、r=0.35,运动员速度增加5%,上车后的下降速度将增加14%。
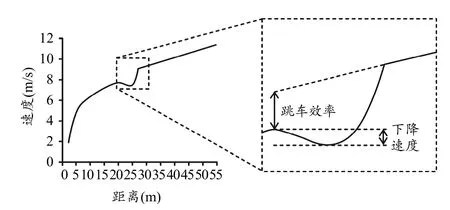
图3 启动加速阶段跳车效率和下降速度(Colyer et al.,2015)Figure 3. Jumping Efficiency and Speed Decrease in the Acceleration Phase
跳车效率的研究解释了提高启动加速阶段成绩并不能提高总成绩的原因,因为速度越大导致跳车效率降低,进而导致了上车后速度的降低,以至于影响总成绩(Zanoletti et al.,2006)。Colyer等(2018)研究结果的假设是随着加速阶段的速度增大,运动员的着地时间在逐渐减小,依据力量发展速率原理,在蹬地跳上雪车时所产生的地面作用力将减小,由此导致了雪车速度与人体速度不匹配(人体速度落后于雪车速度)。因此,运动员启动加速阶段的速度越快,起跳技术(起跳角度、起跳高度、起跳速度、起跳姿势等)方面也应该越优化。
3.4 滑行技术
良好的滑行技术主要取决于运动员的技术水平、雪车(橇)类型以及运动员的身体形态,其中技术水平是影响运动成绩的关键性因素。在一条标准的赛道上,运动员要经历14~20个弯道,因此良好的弯道滑行技术对于运动员成绩至关重要。雪车项目通常进行转弯的方法为:1)膝转向,通过一侧膝对雪车框架施加力,可以造成整个雪车的不对称,比如在进行左转时,左侧膝作用力于钢架雪车上;2)肩转向,肩转向是由于膝关节的发力,造成了对侧肩的紧张,起到了更好的支撑作用;3)肩与膝转向,在进行较大曲度的转弯时,一般肩与膝要同时发力,如左膝与左肩进行收缩,使雪车左转(Roberts,2013)。
自1970年以来,Baumann等(1973)就已经开始运用一维的数学模型来模拟雪橇转弯技术。Hubbard等(1989)在一维模型的基础上,研究了三维非线性雪橇动态模型,该模型被用来计算模拟雪橇转弯时的三维特征。Huffman等(1993)通过提高三维动态雪橇模型的形式,并以此作为仿真模拟器的基础,应用于美国雪橇队备战 1992年和1994年奥运会的训练中。Zhang等(1995)对挪威利勒哈默尔奥林匹克赛道进行了物理分析与数学建模,由此推算出了在特定弯道下运动员所需要的转弯力与行驶角度的具体值,确定了特定弯道下的最优速度与时间,在该赛道的第6弯道处(始于388 m,止于500 m),通过计算得出自由式滑行与最优化控制完成的时间为4.342 s与4.305 s。如图 4所示,计算结果表明,在该弯道自由式滑行距离是112.958 m,而最优化控制完成的滑行距离是 112.604 m,其速度也高于自由式滑行 0.439 m/s。因此,利用数学模型进行计算可以帮助教练员:1)确定特定赛道下运动员的最优表现成绩,以帮助运动员制定训练目标以及挖掘潜能;2)将运动员实际训练中的表现与最优表现进行对比,以发现训练中的具体问题。
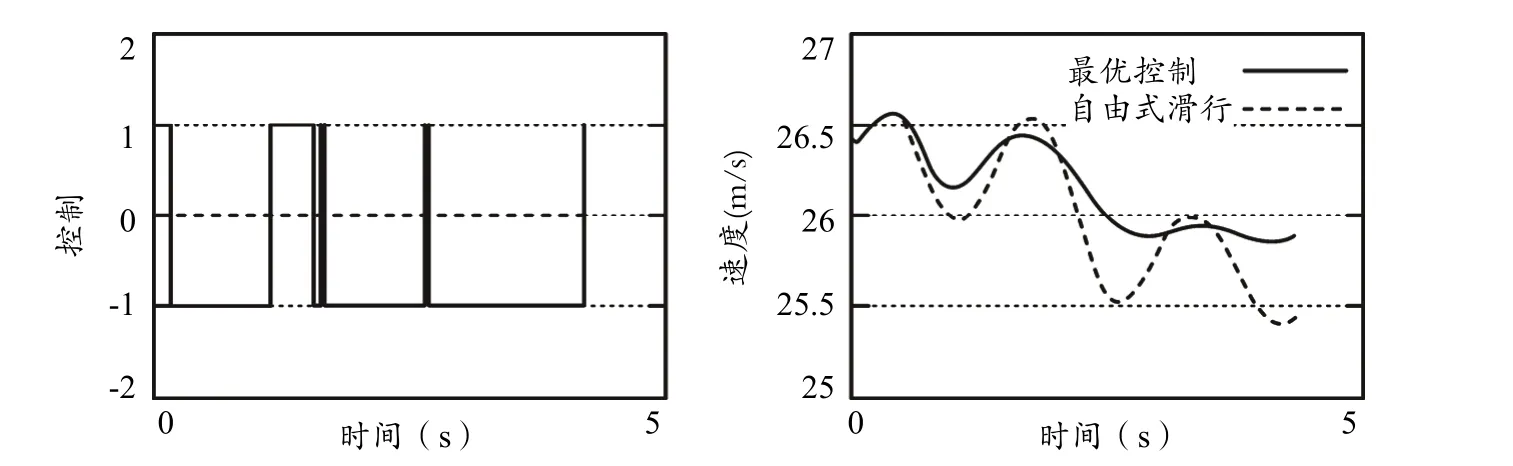
图4 利勒哈默尔赛道4人雪橇项目第6弯道的自由式滑行与最优控制速度对比(Zhang et al.,1995)Figure 4. Minimum-time Optimal Control and Free Speed of a Four-man Sled in Lillehammer in Curve 6
VR(虚拟现实)是近年来发明的一种人机结合的新技术,已经广泛应用于医学、航天、道路桥梁以及生物力学等研究。挪威越野滑雪国家队已经开始应用 VR技术进行日常训练。雪车(橇)的滑行技术可以通过模拟实际赛道对运动员的视觉、触觉以及力觉进行训练反馈,采用 VR技术进行训练也可以避免在实际训练中的危险。由于雪车(橇)项目的危险系数较高,对于初学者来说,首先应进行一般性的技术训练,逐渐进入专项训练时,可以先采用赛道的分段训练或者半程训练。每次实战训练都要求运动员的精神高度集中,神经与机体容易出现疲劳,如果训练次数过多,将会导致“撞击”“翻车”的次数增加,从而增加了运动员的受伤概率,通常专项训练应保持在每天 3~4次(袁晓毅 等,2017)。
4 体能
4.1 力量训练
外在动作特征的差异决定了内在肌肉发力的不同。Goldman等(2018)使用16台高速摄像机和3块测力台研究了 19名高水平雪橇运动员在推橇加速阶段支撑期髋、膝、踝、跖趾关节的机械功率。如图 5所示,髋关节与膝关节对于推进阶段起着拮抗相反的作用,伸髋主要的贡献在于前支撑阶段,在整个支撑阶段的 50%~90%主要由跖屈推动身体向前移动,然而伸膝只贡献了较小的推动力,因此雪橇运动员的在伸髋、伸膝方面的贡献与短跑运动员完全不同。
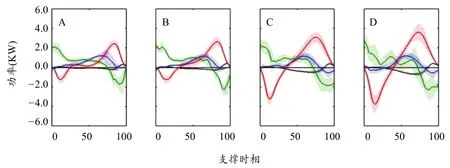
图5 加速阶段支撑期髋(绿)、膝(蓝)、踝(红)、跖趾关节(黑)机械功率(Goldman et al.,2018)Figure 5. Mechanical Power of Hips (green), Knees (blue), Ankles (red) and Metatarsophalangeal Joints (black) in the Acceleration Phase注:(A)第1步;(B)第2步;(C)10 m;(D)30 m。
推车加速阶段主要依靠伸髋肌群与跖屈肌群为制定训练计划,提供了较好的科学依据。在具体训练方法的要求上,由于快速力量受到最大力量的影响,其中起主要作用的是神经对肌肉的最大支配能力,具体训练方法如表 3所示(陈小平,2008)100。在具体的训练手段上,雪橇运动员更应该着重于伸髋肌群与踝跖屈肌群的力量训练,低杠位的负重深蹲是直接训练“髋部发力”的复合运动模式;硬拉提高力量的传输效率与姿势力量;力量翻提高肌肉用力的时机感与同步能力;负重提踵以及跳跃性练习能够有效发展踝跖屈肌群的力量与快速力量。

表3 快速力量训练方法Table 3 Methods of Explosive Strength Training
4.2 核心控制训练
尽管雪车与雪橇项目在滑行阶段的技术动作完全不同,但两个项目都是以核心稳定性为主要的前提条件,这为一般性的训练内容提供了科学基础。雪车运动员在滑行阶段主要依靠核心稳定性以及肩关节与膝关节的灵活性,雪橇运动员则主要依靠核心稳定性以及四肢对橇的精准控制。核心稳定性是指在运动中控制骨盆和躯干部位肌肉的稳定姿态,为上下肢运动创造支点,并协调上下肢的发力,使力量的产生、传递和控制达到最佳化(黎涌明等,2008)。
核心稳定性训练之所以成为滑行阶段的重要训练方法主要基于以下3个方面:1)核心稳定性重视深层肌肉群与小肌肉群的发展,可以提高运动员在滑行过程中对身体的精准调控能力;2)核心稳定性训练突出躯干力量,躯干稳定性的提高可以帮助运动员保持更稳定的弯道技术;3)在弯道转弯时,核心稳定性训练可以提高运动员膝关节与肩关节的协调性发力。
作为一般性的训练内容,核心稳定性训练大致可以分为以下几种类型:1)外部环境上:稳定与非稳定条件;2)负荷上:徒手和负重;3)运动方向上:多维方向;4)用力方式上:静力和动力以及动静结合方式(黎涌明 等,2008)。钢架雪车运动员除了进行一般性的核心稳定性训练内容外,还应进行符合专项特征的训练内容,例如俯卧瑞士球上模仿躯干对雪车精准的控制与发力,俯卧训练椅颈部力量与耐力训练等(Mosey,2014)。
5 减阻
雪车(橇)属于冬奥会竞速类项目,在完成启动加速后的滑行过程中(不存在失误的情况下)只受到自身重力、空气阻力以及触冰阻力的影响。在自身重力与触冰阻力相对固定的情况下,如何在大约140 km/h的速度下减小空气阻力变得意义重大。在空气减阻方面,相比于有舵雪橇,钢架雪车空气动力学研究较少。Hastings(2008)研究认为,钢架雪车体积相对较小,空气阻力只占到总阻力的9%左右。而有舵雪橇由于具有较大的迎面面积,空气阻力减小 3%,最终运动成绩可以提高 0.1 s(Gibertini et al.,2010)。因此,多数减阻技术的研究主要集中在有舵雪橇项目上。有舵雪橇在空气动力学方面的研究,主要集中在通过优化橇体本身的设计以及运动员姿态来减小空气阻力,具体涉及碰撞杆、前后整流罩、橇身侧翼、运动员在不同阶段的最佳位置等(Dabnichki et al.,2004,2006)。
在橇体设计方面,Gibertini等(2010)采用风洞试验比较了3种不同设计结构(设计1:原始形状,h=50 mm;设计2:原始形状,h=70 mm;设计3:改进后形状,h=70 mm)的雪橇风阻(图 6),测试结果表明,改进后的雪橇形状高度在70 mm时的风阻最小(表4),因此,在模拟真实环境下测出的空气动力学数据,对于运动成绩的提高具有重大意义。
在运动员姿态方面,Motallebi等(2004)比较了男子双人雪橇在器材设计与运动员姿态位置的空气动力学特征,风洞测试结果表明,雪橇前侧与侧面的改进可以降低空气阻力,运动员的姿态对于阻力也有重要的影响。将制动员上身前倾角度划分为 4个范围(I:0°、II:0°~40°、III:40°~52°、IV:52°~90°),通过比较发现,制动员在40°~52°前倾时空气阻力最小,通过进一步比较,当制动员上身前倾在46°±1°时,空气阻力最小。

表4 不同设计结构的风阻(140 km/h,直道)Table 4 Wind Resistance of Different Design Structures
在运动员的位置顺序方面,法国队 4人有舵雪橇通过测试运动员位置顺序的风阻、无负荷雪橇以及制动员位置的风阻来不断优化成绩,最终帮助法国队有舵雪橇项目在比赛时的空气阻力从0.250降到0.234~0.237,最大速度提高了 5 km/h(Dabnichki et al.,2006)。
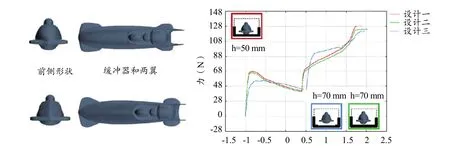
图6 有舵雪橇在不同形状与高度下的风阻测试图(Gibertini et al.,2010)Figure 6. Wind Resistance of Bobsled at Different Shapes and Heights
从已有的研究可以看出,国际上通过空气减阻提高雪橇运动成绩已经达成共识。空气减阻主要围绕橇体本身的设计、运动员的姿态、运动员的位置等,通过风洞试验不断的改造与优化,可以明显提高运动表现。在奥运会比赛中,由于高水平运动员的运动能力可提升空间相对较小,运动员的成绩竞争相当激烈,因此,空气减阻是提高雪橇运动成绩的重要途径。
6 总结与展望
6.1 总结
美国、德国、瑞士一直是雪车(橇)项目的强国,近年来,加拿大、拉脱维亚等国家在该项目上成绩提高显著,加大了该项目的竞争性。
技术层面,雪车(橇)项目的运动成绩与启动加速阶段、滑行阶段存在显著性的相关关系;启动加速阶段单手推车较双手推车更加灵活与普遍,但稳定性相对略差;此阶段应更加关注运动员步频的提高,以及跳车效率的提高。
体能层面,启动加速阶段的训练中,应着重伸髋与跖屈肌群的快速力量提高;核心稳定控制性训练以及肩、膝、四肢灵活性训练可以作为提高滑行技术的一般性训练内容;专项滑行技术应在确保安全的情况下,每天控制在3~4次。
空气减阻层面,主要围绕有舵雪橇的橇体设计、运动员姿态与位置进行风洞试验研究,可以有效提高运动成绩。
6.2 展望
雪车(橇)属于有器械类运动项目,通过科学的训练理论与先进的科学技术来提高运动成绩,已达成共识。未来的研究应专注于训练理论的创新与科学技术的加持。雪车(橇)作为我国的新兴运动项目,需要进一步深化项目特征的理论研究,主要是专项技术与专项体能反映出来的生物力学以及生理学特征;需要进一步加强训练理论的应用研究,尤其是如何在训练实践中提高运动员的竞技能力;需要进一步促进科学技术的应用研究,特别是将跨学科的研究成果转化到比赛应用中。