基于点航迹质量评估的雷达目标联合检测跟踪方法
2019-03-28夏永红匡华星张玉涛
夏永红,张 宁,匡华星,张玉涛
(中国船舶重工集团公司第七二四研究所,南京211153)
0 引 言
目标检测跟踪是警戒监视雷达最基本的任务之一。经典的雷达检测跟踪处理过程为经检测器和点迹提取器处理后形成点迹进行航迹起始与跟踪。随着现代战场环境的日趋复杂,敌方目标总是在有源/无源干扰或地海杂波掩护下进行突防。复杂的背景环境造成雷达检测器过门限回波数量急剧增加,点迹提取器输出大量虚假点迹,从而导致航迹起始和跟踪时形成数量不可控的虚假目标。大量虚假目标的存在使得雷达系统既无法有效甄别和提取真实目标参数信息,及时对敌目标做出相应威胁等级判别,又耗费系统探测时间资源,造成任务量和处理量过载。为了控制虚警数量,最直接的方法即是提高检测器检测门限,但目标检测概率随之降低,造成目标漏检。
检测前跟踪(Track⁃Before⁃Detect, TBD)技术利用空间中目标运动状态的规律性和连续性,按照可能的目标运动轨迹在周期间进行预先跟踪处理,并通过定义搜索轨迹指标函数对连续多周期数据的联合处理结果进行检测判决,同时实现目标检测与航迹提取。这是解决复杂背景下目标检测跟踪的一种重要方法[1⁃2]。诸如此类利用雷达回波幅度信息的 TBD算法,常用的有基于动态规划(Dynamic Programming,DP)的检测前跟踪算法(DP⁃TBD)[3⁃4]、基于 Hough 变换(Hough Transform,HT)的检测前跟踪算法(HT⁃TBD)[5⁃6]、基于递归贝叶斯滤波( Recursive Bayesian Filtering, RBF)的检测前跟踪算法(RBF⁃TBD)[7⁃9]等。为进一步提高目标检测性能,也有学者提出了利用相位信息的TBD 算法[10]等。
在公开的文献资料中,TBD方法不胜枚举,但大多数均为理论分析或仿真,满足实际工程应用需求的方法较少。意大利Selex公司的EmanueleGrossi等学者在文献[11⁃12]中提出的一种 DP⁃TBD 算法,先通过检测器和点迹提取器预处理得到待确认点迹信息,再利用动态规划思想进行多周期联合检测得到确认目标点迹信息。该算法以点迹局部信杂噪比为参考定义多周期检测指标函数,不需要对目标运动状态空间离散化,计算复杂度远低于基于Viterbi算法的DP⁃TBD方法,并在文献[13]中基于实测海杂波数据叠加模拟目标的方式对该方法进行了验证和性能分析。
文献[11⁃13]中提出的TBD算法思想不需要改变雷达现有数据处理架构,且计算量没有明显增加,能够满足实时处理的要求。但是,该方法以提取的待确认点迹局部信杂噪比构建搜索路径指标函数,在强杂波环境下难以对杂波点迹进行有效剔除。本文在该算法思想基础上提出一种基于点航迹质量评估(Plot⁃Track Quality Evaluating,PTQE)的联合检测跟踪(Detect&Track, D&T)方法(PTQE⁃D&T),以自适应门限检测器对原始视频数据进行初始门限检测,然后在点迹提取的同时基于凝聚为一个点迹的多维回波特性计算点迹质量,再以点迹质量和搜索路径代价因子构建动态规划暂时航迹指标函数,以多周期累计的指标函数作为最终检测判决依据,实现联合目标检测跟踪处理。本文以一组两坐标雷达实测数据和一组三坐标雷达实测数据对PTQE⁃D&T算法性能进行了验证。
1 PTQE⁃D&T 算法原理
PTQE⁃D&T算法处理流程为:对经过信号处理后的原始视频数据依次进行自适应门限检测、点迹提取及质量评估、动态规划暂时航迹形成、多周期联合检测判决和目标检测提取,完成联合检测跟踪处理。
1.1 自适应门限检测
为了控制过门限回波数量,同时保证后续处理目标检测提取的发现概率,对原始视频数据进行初始门限检测。 检测准则根据背景数据自适应选取[14⁃16],在噪声背景时以噪声数据为参考进行慢门限检测,在临近多目标场景时以自动删除快门限检测,在杂波边缘和杂波区以有序统计快门限检测。在初始门限检测时,为了尽可能保留目标信息,自适应检测门限设置低于常规检测门限,所产生的高虚警在后续点迹提取和多周期联合检测环节进行筛选和抑制。
1.2 点迹提取及质量计算
点迹提取按照一定准则对分布在多个距离单元、俯仰和方位单元(波位)内属于同一目标的回波进行检测凝聚处理,提取回波“质心”信息形成点迹,得到点迹距离、方位、仰角等多维信息,在点迹提取的同时根据凝聚为一个点迹的多维回波数据计算点迹凝聚质量。一般来说,真实目标回波在距离、俯仰和方位上回波形状及展宽应符合一定的包络特征,多维回波数据的多普勒速度或多普勒通道号应在较小的范围内波动,而且过门限回波数量应与回波强度成正比。基于这些特征,用于描述与真实目标回波吻合程度的点迹质量可以定义为

其中,Qr为距离维凝聚处理时计算的质量,用于衡量距离维回波形状,例如对于窄带雷达,真实目标回波在距离维脉压后满足sinc函数包络特性;Qe和Qa为俯仰维和方位维凝聚处理时计算的质量,用于描述回波包络在俯仰和方位维与天线方向图形状的一致性;ρv为多普勒滤波处理后多普勒速度一致性因子。通过计算点迹质量,对真实目标点迹和虚假点迹进行初步标识。
假设点迹提取的过程按照距离⁃俯仰⁃方位的顺序依次进行。具体来说,距离维检测凝聚质量定义为过门限回波个数Nr_echo及其幅度Ai的函数Qr=fr(Nr_echo,Ai,Nres),其中Nres为雷达一个距离分辨单元内采样单元个数。俯仰维检测凝聚质量定义为凝聚为当前俯仰点迹的距离点迹个数NRanPlot、质量Qr_i及幅度Ar_i的函数Qe=fe(NRanPlot,Qr_i,Ar_i,NEφ),其中NEφ为俯仰天线方向图3 dB波宽跨越的俯仰单元(波位)个数。方位检测凝聚质量定义为凝聚为当前点迹的俯仰点迹个数NElePlot、质量Qe_i及幅度Ae_i的函数Qa=fa(NElePlot,Qe_i,Ae_i,NAθ),其中NAθ为方位天线方向图 3 dB 波宽跨越的方位单元(波位)个数。距离、俯仰和方位质量计算如下所示(其中CQ为质量归一化系数),点迹质量定义为Qplot=ρvQa,ρv∈[0,1]用于描述多维回波数据Doppler通道号一致性(如果在信号处理时进行了Doppler速度估计,则直接以速度值进行判定)。
算法1计算距离维质量
算法2计算俯仰维质量

算法3计算方位维质量


综上所述,提取的点迹共包含8维信息,将第k周期第n个点迹表示为

其中,Tk,n表示点迹时刻,Rk,n表示点迹距离,θk,n表示点迹方位,φk,n表示点迹仰角,Ak,n表示点迹幅度,Nk,n表示点迹局部杂波/噪声功率,Dk,n表示点迹 Doppler通道号(未做Doppler滤波处理时通道号为0),Qk,n表示点迹质量。
设第k周期输出点迹个数为PNk,则第k周期点迹信息矢量表示为

1.3 基于动态规划的暂时航迹形成
对于输入的待确认点迹信息,基于动态规划形成暂时航迹,采用逆序递推搜索的方式,对每一个点迹以设定运动速度范围建立搜索区域,以关联点航迹质量和搜索路径代价因子构建航迹指标函数,基于指标函数进行多周期间优化搜索,过程如下:
(1)初始化:设定目标运动速度范围为[Vmin,Vmax],雷达数据周期为T。对于所有的s1∈S1,定义指标函数为I(s1)=Q1,n,路径轨迹为 Ψ1(s1) = (R1,n,θ1,n,φ1,n),n=1,…,PNk。
(2) 递推搜索:对于所有的sk∈Sk,k=2,…,K,以当前点迹位置为中心,分别以[rmin,rmax]和[2rmin,2rmax]建立环形搜索关联波门U,其中rmin=VminT,rmax=VmaxT,更新指标函数和路径轨迹为

其中,W( sk)=ρ1Qk+ρ2Pk为第k周期路径指标函数更新值,由点迹质量Qk和路径代价因子Pk构成,ρi,i=1,2为权系数;路径代价因子Pk用于描述当前点迹与优选的搜索路径关联后暂时航迹航速航向变化率,变化率越小Pk值越大,反之越小。对于连续2个周期未更新的暂时航迹作删除处理。
1.4 多周期联合目标检测提取
设定多周期积累代价函数检测门限TI,对于持续时间达到联合检测周期K且满足检测门限的搜索路径I( sK)≥IT,按照 Ψk(·),k=1,…,K进行路径位置提取形成航迹,删除不满足检测门限的暂时航迹。航迹提取后,对当前周期产生的所有航迹两两之间进行位置比较,对于同一目标的重复航迹以指标函数最大为优选原则,进行航迹归并,完成多周期联合判决目标提取。
2 PTQE⁃D&T 算法性能验证
本文以一组对海两坐标雷达实测数据和一组三坐标雷达实测数据对PTQE⁃D&T算法性能进行验证,在点迹提取时采用质心法计算点迹位置信息。
2.1 对海实测数据处理
雷达天线扫描方式为对海扇扫,其中连续50个周期经过检测器和点迹提取器处理后的待确认点迹如图1(a)所示。随机选取场景中15批目标统计多周期平均点迹质量如图1(b)所示。PTQE⁃D&T算法处理结果如图2(a)所示。 统计 PTQE⁃D&T算法和文献[13]算法每周期处理累计航迹总数如图2(b)所示。
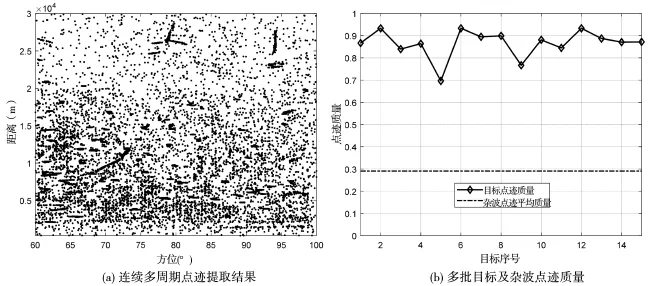
图1 对海实测数据
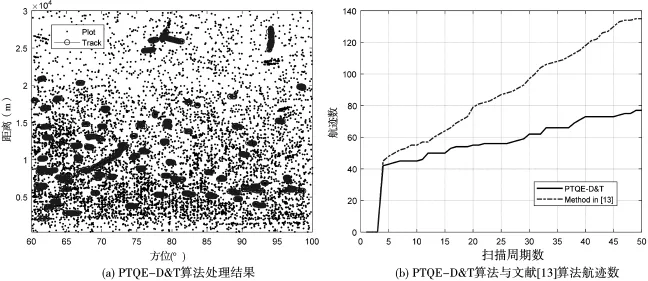
图2 对海实测数据处理结果
2.2 对空实测数据处理
雷达连续60个周期实测采集数据经过检测器和点迹提取器处理后的待确认点迹如图3(a)。PTQE⁃D&T算法处理结果如图3(b)所示。选取场景中17批目标统计多周期平均点迹质量如图4(a)所示。统计PTQE⁃D&T算法和文献[13]算法每周期处理累计航迹总数如图4(b)所示。

图3 对空实测数据
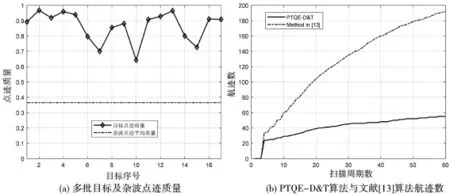
图4 对空实测数据统计结果
需要说明的是,当目标局部信杂噪比较高时连续多周期目标点迹质量整体上较高,但当目标回波相对较弱时质量也会降低。杂波点迹整体上质量较低,但也存在质量较高的杂波点。将距离±40 km以内的点迹以0.6为门限画出(如图5所示),质量大于0.6的点迹以∗显示,小于0.6的点迹以·显示。

图5 距离±40 km以内质量大于0.6和小于0.6的点迹
由于该组数据未进行动目标处理,Doppler信息无法利用,近区存在大量高质量杂波点迹,因此需要利用多周期联合判决对虚假进一步抑制。本文联合处理周期数K=4。从处理结果中可以看出还存在较多的虚假航迹,在实际应用中增加联合处理周期数可以进一步抑制虚假航迹。
3 结束语
本文提出了一种基于点航迹质量评估的雷达目标联合检测跟踪方法。该方法不改变经典的雷达信息处理架构,且计算量没有明显增加,易于工程应用实现。从两组实测数据的处理结果可以看出,本文提出的PTQE⁃D&T算法通过在点迹提取时对点迹质量进行评估实现了真实点迹和虚假点迹的初始甄别,经过多周期联合检测跟踪处理后,在正确发现目标的同时能够有效抑制虚假目标的产生。与文献[13]方法处理结果对比可以看出,在保证相同目标发现能力的同时,本文方法可以减少50%左右虚假航迹。
