关于磁场中靠墙导体棒倾倒时其“平均感应电动势”的探讨
2019-03-27宋辉武刘博
宋辉武 刘博
摘 要:推导出靠墙导体棒倾倒时的包络线为星形线,并且证明了导体棒与星形线相切的点恰好是棒上的最小速度点。结合这些数理性质,最后利用星形线巧妙地构造出恰当的虚拟回路,求解了导体棒下滑过程中的正向平均感应电动势和反向平均感应电动势。
关键词:感应电动势;星形线;直线系;包络线
中图分类号:G633.7 文献标识码:A 文章编号:1003-6148(2019)2-0062-3
1 问题引入
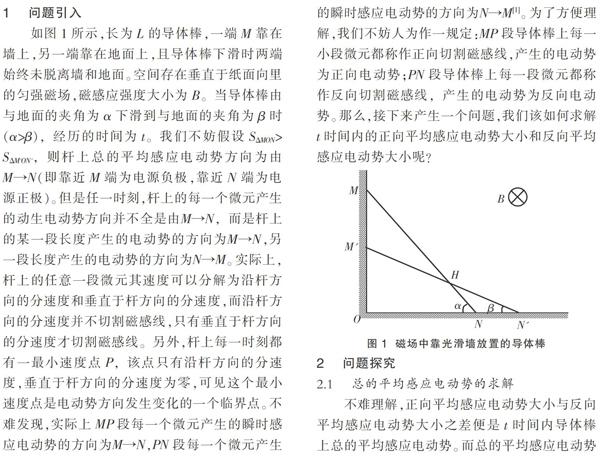
如图1所示,长为L的导体棒,一端M靠在墙上,另一端靠在地面上,且导体棒下滑时两端始终未脱离墙和地面。空间存在垂直于纸面向里的匀强磁场,磁感应强度大小为B。当導体棒由与地面的夹角为α下滑到与地面的夹角为β时(α>β),经历的时间为t。我们不妨假设SΔMON>SΔM'ON',则杆上总的平均感应电动势方向为由M→N(即靠近M端为电源负极,靠近N端为电源正极)。但是任一时刻,杆上的每一个微元产生的动生电动势方向并不全是由M→N,而是杆上的某一段长度产生的电动势的方向为M→N,另一段长度产生的电动势的方向为N→M。实际上,杆上的任意一段微元其速度可以分解为沿杆方向的分速度和垂直于杆方向的分速度,而沿杆方向的分速度并不切割磁感线,只有垂直于杆方向的分速度才切割磁感线。另外,杆上每一时刻都有一最小速度点P,该点只有沿杆方向的分速度,垂直于杆方向的分速度为零,可见这个最小速度点是电动势方向发生变化的一个临界点。不难发现,实际上MP段每一个微元产生的瞬时感应电动势的方向为M→N,PN段每一个微元产生的瞬时感应电动势的方向为N→M[1]。为了方便理解,我们不妨人为作一规定:MP段导体棒上每一小段微元都称作正向切割磁感线,产生的电动势为正向电动势;PN段导体棒上每一段微元都称作反向切割磁感线,产生的电动势为反向电动势。那么,接下来产生一个问题,我们该如何求解t时间内的正向平均感应电动势大小和反向平均感应电动势大小呢?
2 问题探究
2.1 总的平均感应电动势的求解
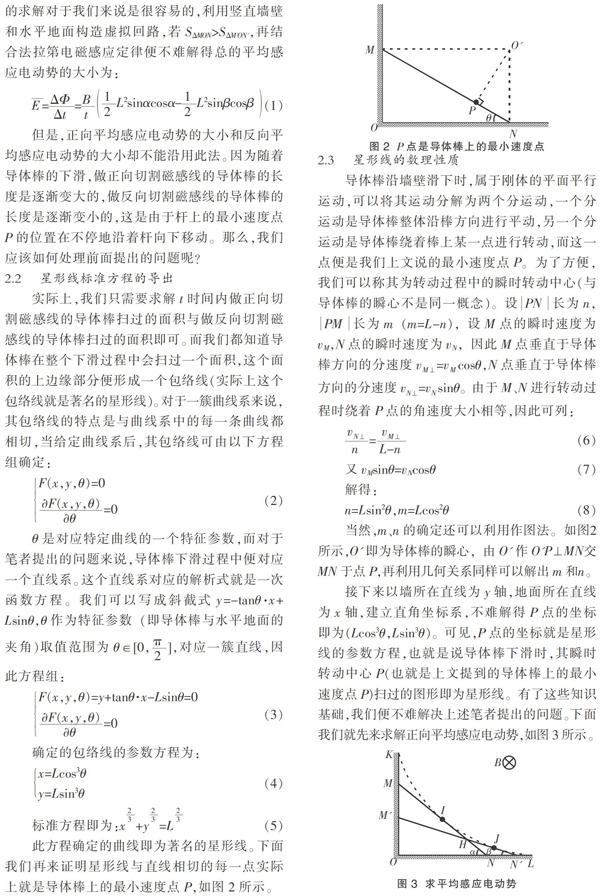
但是,正向平均感应电动势的大小和反向平均感应电动势的大小却不能沿用此法。因为随着导体棒的下滑,做正向切割磁感线的导体棒的长度是逐渐变大的,做反向切割磁感线的导体棒的长度是逐渐变小的,这是由于杆上的最小速度点P的位置在不停地沿着杆向下移动。那么,我们应该如何处理前面提出的问题呢?
2.2 星形线标准方程的导出
3 结 语
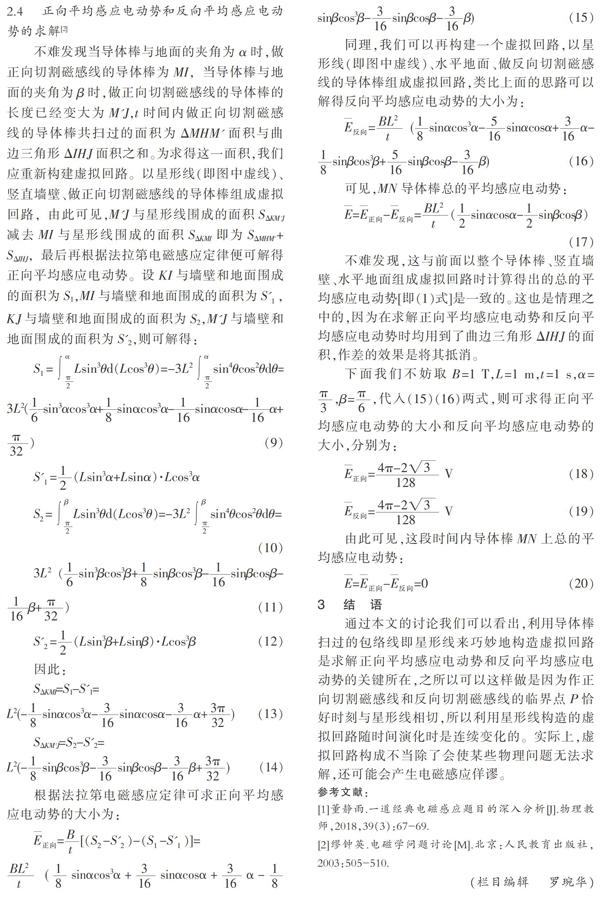
通过本文的讨论我们可以看出,利用导体棒扫过的包络线即星形线来巧妙地构造虚拟回路是求解正向平均感应电动势和反向平均感应电动势的关键所在,之所以可以这样做是因为作正向切割磁感线和反向切割磁感线的临界点P恰好时刻与星形线相切,所以利用星形线构造的虚拟回路随时间演化时是连续变化的。实际上,虚拟回路构成不当除了会使某些物理问题无法求解,还可能会产生电磁感应佯谬。
参考文献:
[1]董静雨.一道经典电磁感应题目的深入分析[J].物理教师,2018,39(3):67-69.
[2]缪钟英.电磁学问题讨论[M].北京:人民教育出版社,2003:505-510.
(栏目编辑 罗琬华)
