高轨遥感相机中焦面制冷机的功率驱动方案设计
2019-03-26耿振华
汪 瑜, 耿振华
(北京空间机电研究所,北京100094)
0 引 言
遥感相机是监测地表情况快速而有效的手段,在国土测绘、资源统计、环境监测等领域中都有不错的表现。尤其是当出现突发状况时,其快速捕获信息能力及时地为应急处理行动提供了空间信息数据。卫星轨道是遥感相机捕获地表数据能力的首要影响因子,轨道决定着卫星的分布位置从而制约着遥感相机的地面分辨率和成像幅宽。轨道越高,成像幅度越宽,但同时在相同成像技术下的地面分辨率下降,所以在高轨道实现高分辨率的遥感是当前十分重要的研究方向。遥感相机中焦面组件的制冷效果是决定着相机成像质量的关键,设计适应于高轨道运行的焦面制冷机控制电路也是目前急需解决的问题。
高轨道目前是大部分通讯、广播、气象等功能卫星的轨迹,对于高分辨率遥感相机来说仍是一个新领域。高轨道是一个恶劣的干扰环境,在这一区域的卫星遭受着高能带电粒子和等离子体的多重作用,可造成单粒子翻转、总剂量效应等事件频发,其概率大大超过低轨道环境。原因是相比于低轨道,高轨道的电离总剂量增大了近50倍,位移损伤注量增大了近2倍[1]。
本文针对高轨道遥感相机中焦面制冷机的功率驱动,设计一种抗强辐照的H桥式功率驱动电路方案,电路包括磁隔离电路、脉冲恢复电路与逻辑保护电路。同时优化基于FPGA 实现的SPWM驱动信号,降低了计算量与资源占用,提升了驱动信号的分辨率。
1 驱动隔离方案分析
电路隔离是采用隔离元器件切断噪声干扰的途径,使硬件设备符合电磁兼容性的要求。在功率驱动电路中的隔离措施保证了二次数字电与一次功率电的绝缘,防止了大功率开关信号对数字小信号电路的干扰,是驱动电路中缺一不可的环节。数字电路隔离常见的方法有光耦隔离、磁隔离、继电器隔离、光纤隔离等,其中数字量输入隔离方式主要采用磁隔离与光耦隔离,下文针对这两个隔离方案进行分析与选择。
1.1 光耦隔离
光电耦合器件(简称光耦)是信号隔离常用的元器件,它通过电光电转换来实现隔离效果。器件内部的LED 将接收的电信号转换为光信号,然后通过光电二极管或光电三极管进行光电转换,最后内部放大级来实现信号的放大输出[1]。由于其隔离效果好、噪声低、体积小等优点,故较常运用于航天器中,具体原理见图1。

图1 光耦隔离原理图
光耦器件存在一个很大的缺点就是受辐射环境中的位移损伤注量影响很大,不同的运行轨道存在不同的电离总剂量与位移损伤注量,一般来说只要选型合理,光耦器件适用于低轨道遥感相机,且在轨应用验证情况良好。但是针对高轨道遥感相机,位移损伤注入量激增,造成了光耦器件中LED的性能衰减严重,电光转换率降低。
式(1)表示的是LED 发光功率与辐照通量之间的关系:

(1)
式中,I0为初始光通量;I为辐照后的光通量;0、分别为辐照前和辐照后LED内部少数载流子的寿命;K*为衰减常数,与半导体材料和辐射场的互相作用有关;φ为辐照粒子通量;n与器件损伤机理有关。当辐照环境很恶劣时,0K*φ非常大,说明辐照后少数载流子寿命缩短,导致I减小。显然,光耦隔离方法不适用于高轨道遥感相机。
1.2 磁隔离
磁耦合隔离是指利用电磁感应原理,把需传送的变化信号加在变压器的初级线圈,从而产生变化的磁场。该磁场使次级线圈的磁通量产生了变化,该变化与激励信号的变化相关,完成了信号的传送。在整个传输过程中,初级与次级之间在无电连接的情况下完成了信号传奇,起到了隔离效果[2]。
在高轨应用中光耦隔离器件会有显著的位移损伤而无法满足需求,磁隔离芯片受外部磁场干扰和磁化的影响很小,其作为功率隔离能够很好地满足未来高轨应用需求,只是磁隔离的处理相对光耦隔离增加了一定的系统复杂度[3]。
通过以上分析,本文选择磁隔离方式来实现适用于高轨遥感相机的功率驱动,实现二次数字电与一次功率电的隔离功能。并且高轨航天器所选芯片必须满足抗辐照要求,所选磁隔离器件M-MB2A/K芯片的指标如表1所示,满足要求。

表1 M-MB2A/K芯片抗辐照指标
2 功率驱动电路设计
功率驱动电路[4]包括磁隔离电路、SPWM信号恢复电路、逻辑保护电路、H桥控制电路四个部分,具体实现如下文所示。

图2 功率驱动电路原理图
2.1 双脉冲处理磁隔离电路
功率驱动电路中的磁隔离接口电路选用脉冲变压器实现信号的隔离传输。当SPWM信号的载波频率设为20 kHz时,其最窄脉冲宽度为0.5 μs,故要求变压器的脉冲上升、下降时间小于0.1 μs,脉冲延迟时间小于0.02 μs,确保不失真地传输脉冲宽度和脉冲相位信息,M-MB2A/K型脉冲变压器满足设计要求。
该脉冲变压器传递的脉冲信号持续时间最长仅0.5 μs,仅与SPWM的最窄脉冲宽度一致。本文设计在主控芯片中将SPWM做双脉冲处理,用两路窄脉冲表示一路SPWM有效信号的上升沿与下降沿,如图3所示。然后将该双脉冲进行磁隔离,最后经脉冲恢复电路和逻辑保护电路输出给H桥驱动电路。设定双脉冲处理后宽度为50 ns(时钟频率20 MHz)。这样的处理保证了脉冲变压器信号传递的有效性。

图3 双脉冲处理磁隔离电路
SPWM+、SPWM-分别为双脉冲处理后的SPWM表征脉冲信号,分别表示SPWM的起始与结束。这两路信号M-MB2A/K芯片生成与其相关的隔离后信号SPWM_S、SPWM_R,完成了SPWM信号的电磁隔离。
2.2 脉冲恢复电路
双脉冲处理后的SPWM波形在经过磁隔离后,需要设计脉冲恢复电路,完成隔离后的波形恢复,如图4所示。
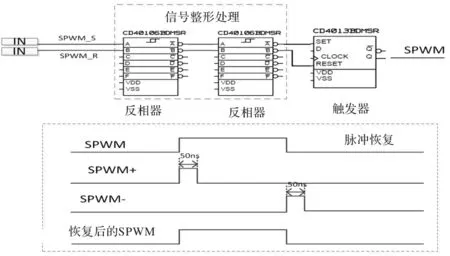
图4 脉冲恢复电路
SPWM_S、SPWM_R为脉冲变压器隔离后的信号,经芯片CD40106整形后接入RS触发器,其输出的信号即为恢复出的SPWM信号。H桥驱动电路需要4路SPWM控制信号,以上分析皆以其中一路的设计为示意。
2.3 逻辑保护电路
为了避免SPWM信号异常时出现功率H桥单侧桥臂直通的风险,同一侧桥臂控制信号两路SPWM在接入驱动芯片前,选用4-2输入与门芯片实现了保护逻辑设计措施,该逻辑可以使得同侧SPWM信号不会同时为高,再辅以足够的软件死区设置时间则可以彻底规避H桥单侧桥臂直通烧毁的风险,如图5所示,以左侧桥臂两路信号为例,当输入信号同时为高电平时,通过逻辑保护后全为低电平。
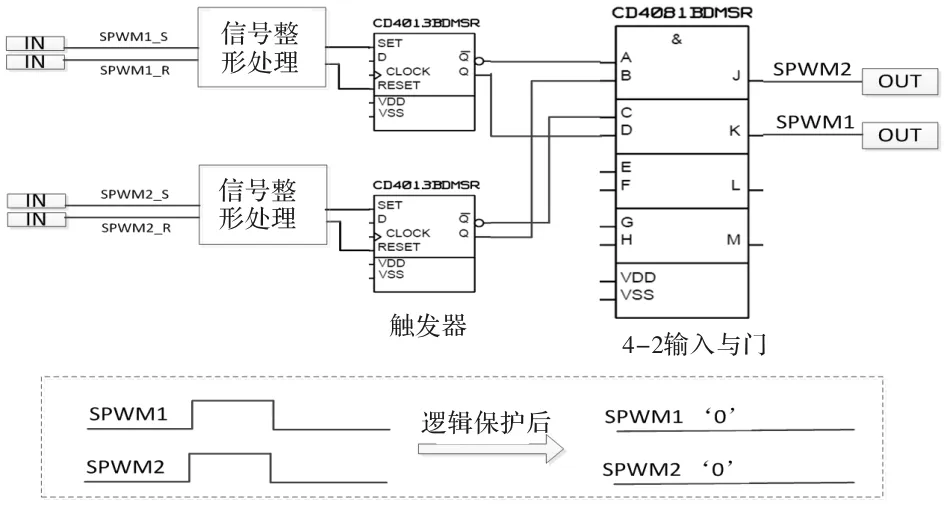
图5 SPWM信号逻辑保护电路
2.4 H桥控制电路
电机驱动电路原理图如图6所示,采用经典的H桥式电路,图中的两组MOSFET(V1,V4)和(V2,V3)轮流导通,实现电流方向的逆变。4路SPWM波形作为逆变输出H桥的4个输入,实现对电机的四象限负载控制驱动。

图6 H桥驱动信号与电路
3 优化驱动信号设计
脉冲宽度调制(Pulse Width Modulation,PWM)是一种采用数字信号来控制模拟电路的技术,优势在于控制简单、动态响应性强,是当下控制领域中热门技术之一。其中,正弦脉宽调制(Sinusoidal PWM,SPWM)的使用较为广泛,多运用于直流交流逆变器等。本文基于FPGA实现数字SPWM信号生成的优化设计,降低芯片资源占用率、减少程序计算量、提升驱动信号的分辨率。
基于查找表的方式[5],提出1/4周期正弦波复用方法来生成无符号数字化正弦调制波;采用加减计数器生成无符号数字化等腰三角波,其具备更好的奇次谐波分量抑制效果。该方法与传统SPWM相比,优点是它可以在采样频率相同的情况下将分辨率提高一倍,无符号化处理使得程序更容易实现,而且复用手段降低了FPGA实现的计算量与资源占用率。具体实现原理如图7所示。
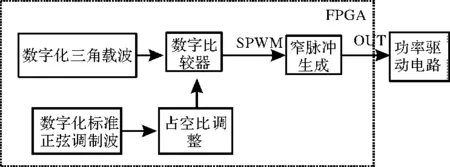
图7 优化驱动信号设计
通过用数字比较器,对数字化正弦调制波与数字化三角载波的幅值进行实时比较,输出SPWM波形,传统SPWM生成方法与优化生成方法对比如图8所示。

图8 传统SPWM与优化SPWM对比
3.1 数字化三角载波
数字三角载波是由加减计数器产生的,选择一定的采样频率,利用计数器加减生成阶梯状的数字化三角载波,且最大幅值为正弦波最大占空比,当采样频率越大时,数字三角波与模拟三角波就越接近。设Ptri为数字化三角载波的最大幅值,fs为加减计数器频率即采样频率,ftri为三角载波频率,三者之间的关系:
(2)
如图9所示,当保证Ptri、fs不变的情况下,有符号数三角波的n为2,无符号三角波的n为1,通过式(2)可以看到无符号化的处理将三角载波的频率ftri提升一倍,从而提升了SPWM信号的分辨率。

图9 有符号数字三角波与无符号数字三角波
3.2 数字化正弦调制波
数字化正弦调制波有两种生成方式,一种是数字转换模拟正弦调制信号,一种是微处理器实时生成。前者适合于随机频谱的调制信号;后者适用于固定频率的信号生成,一般采用查表的实现方法,但全周期正弦波的查找表所占资源很大,对于FPGA实现来说不是一个好的方案。本文基于1/4周期正弦波复用法生成全正向调制信号,该方法解决了全周期查找表的资源占用问题,而且全正向调制信号使得程序便于实现,实现如下图10所示。
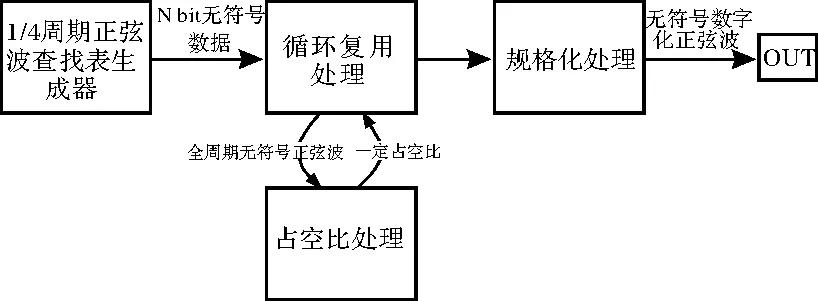
图10 优化数字正弦波生成
(1)1/4周期正弦波查找表生成
选定一个初始相位为0的模拟正弦波,并以固定的采样频率对前1/4个周期进行采样:
(3)

(2)循环复用与占空比处理
对1/4周期正弦波查找表作无符号化的循环复用,形成全正向正弦调制波,使用标识位Sinpn_o来表征正弦波的正负,同时对每个采样点进行占空比处理。当相位为0-π之间,Sinpn_o为高,表示正向正弦波;Sinpn_o为低,表示负向正弦波,这是H桥的正反向驱动的关键信号。具体实现如图11所示,volt为驱动电压量,是占空比的关键数据,最大为载波的幅值。

图11 循环复用与占空比处理
(3)规格化处理
规格化处理使数字化正弦调制信号的最大取值和数字化三角载波的峰值相等,得到占空比处在0~100%的范围内:
(4)
式中,sin_out[n]为占空比处理后的全正向正弦波,Ptri为数字化三角波的峰值,Pvolt为控制量的峰值,i为正弦波采样点模数转换器的位数。
3.3 数字化SPWM生成
输入给H桥的驱动信号SPWM1、SPWM2、SPWM3、SPWM4中前两者为左半桥臂的输入,后两者为右半桥臂的输入,通过正弦波中正负标识位的判断来确定电机的正反向驱动[6]。当标志位为高电平时,正弦调制波大于三角载波时,正向驱动电机,也就是SPWM1、 SPWM4为高电平,SPWM2、SPWM3为低电平;正弦调制波小于三角载波时,反向驱动电机,也就是SPWM2、SPWM3为高电平,SPWM1、SPWM4为低电平,如式(5)所示。这就完成了H桥式驱动信号的设计,当然同一桥臂的上下两个输入信号必须要在软件设置一定的死区时间以避免MOSFET管损坏。

(5)
正弦波正半轴,正向驱动电机;负半轴,逆向驱动电机。最终SPWM波形的实现效果如图12所示。

图12 数字SPWM信号生成
4 仿真与实验结果
4.1 仿真结果
适应磁隔离的设计要求,程序需要对SPWM信号做窄脉冲处理,本文采用FPGA实现驱动信号的生成,时钟为20 MHz,生成50 ns的SPWM窄脉冲,仿真结果如图13所示。

图13 窄脉冲仿真结果
如上图所示,每一路SPWM都由两路窄脉冲信号表示,SPWM1信号由PWM10标识其上升沿,由PWM1标识其下降沿。并且程序还对同侧桥臂上下两个SPWM信号做了300 ns的死区处理,确保不会发生桥臂直通现象。
随着驱动电压值变化的全正向数字正弦波仿真图如图14所示。
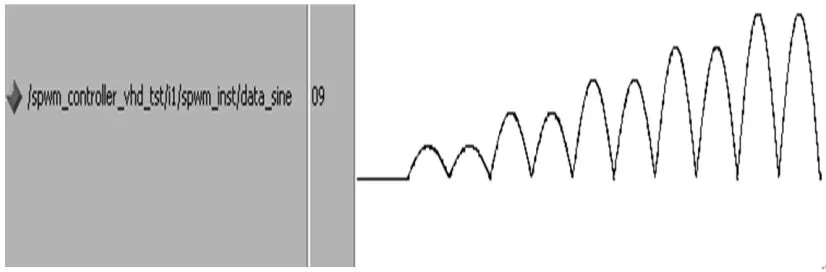
图14 全正向数字正弦波
4.2 实验验证
在实际的实验平台(如图15所示)中,为功率驱动电路提供+12 V的电源,实际工作电流小于30 mA。生成驱动信号的主控芯片选择反熔丝FPGA器件A54SX72A,晶振20 MHz,使用VHDL硬件描述语言完成信号的优化设计。电机选择应用于脉管循环制冷机,驱动频率为50 Hz。
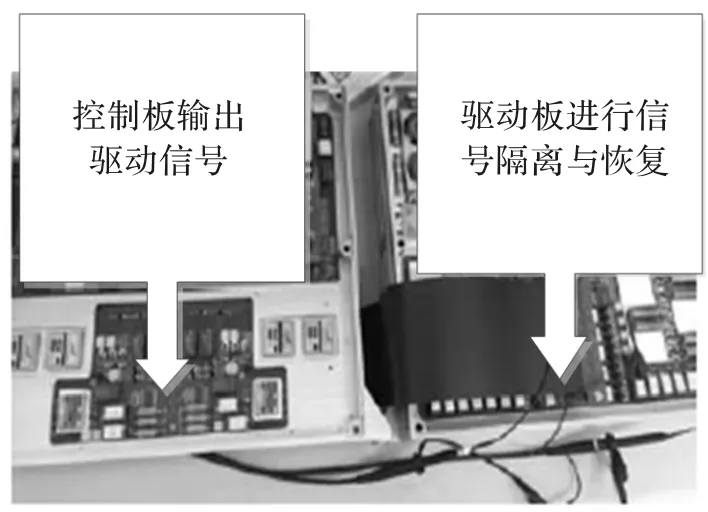
图15 实际硬件电路图
实验中测试了脉冲恢复电路的处理效果和H桥驱动信号,如图16所示,窄脉冲宽度为一个时钟周期(50 ns),设计有300 ns的死区时间。
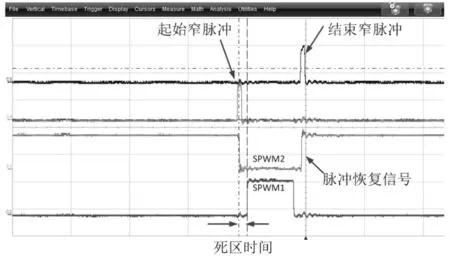
图16 脉冲恢复电路实测效果
图16中的起始窄脉冲与结束窄脉冲是高电平脉冲,与图13的仿真示图不同,原因是在硬件电路中使用了反相器对窄脉冲信号进行整形。图17中的拟合驱动信号是在H桥的驱动端将波形拟合成一个正弦波,作为一种测试信号输出。
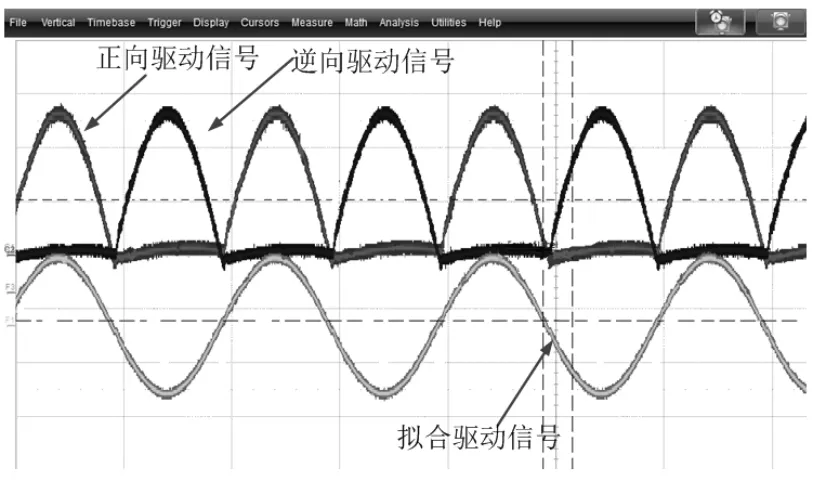
图17 H桥控制信号的实测效果
5 结 语
本文针对强辐照的高轨环境,设计了强干扰抑制的H桥式磁隔离功率驱动电路,且设计了SPWM信号优化方法,并予以工程实现。适用于高轨遥感相机中焦面制冷机的功率驱动方案设计通过了仿真验证,在实际硬件电路中也结合脉管循环制冷机得到了结果反馈,该方案可行。
