一种基于变恢复系数的接触碰撞力模型
2019-03-23王旭鹏吉晓民马尚君佟瑞庭
王旭鹏, 张 艳, 吉晓民, 马尚君, 佟瑞庭
(1.西安理工大学 工业设计系,西安 710048;2.西北工业大学 陕西省机电传动与控制工程实验室,西安 710072)
接触碰撞现象在机械系统中是非常普遍的[1],比如相邻连接件之间的铰链连接处,因相对运动、加工、装配及其使用过程的摩擦磨损等原因导致存在间隙,而间隙正是接触碰撞的根源[2]。接触碰撞势必会引起机械系统动态性能、精度、可靠性及寿命等技术指标的下降[3]。
要研究接触碰撞现象及其对机械系统动态性能的影响,首先应建立可用来准确描述接触碰撞效应的接触碰撞力模型。为此,从20世纪70年代开始,国内外研究者建立了一系列接触碰撞力模型。作为研究接触碰撞现象的奠基者,Hertz最先提出了一种非线性接触碰撞力模型[4],但是,Hertz接触理论的应用条件为:接触体具有非协调几何外形,且接触面为平面。因此,Hertz接触碰撞力模型具有一定的局限性。Ciavarella等[5]在对Persson接触模型改进的基础上,提出了另外一种适用于接触半径非常小且接触半角足够大工况下的接触碰撞力模型,但该模型同样具有局限性,仅适用于小间隙的接触碰撞。Liu等[6]基于弹性基础模型,提出了一种改进的接触碰撞力计算模型,并通过与有限元计算结果进行对比分析,发现改进模型具有更好的适应性;但是,上述模型均没有考虑碰撞过程的能量损耗。
首个考虑碰撞过程阻尼损耗的法向碰撞力模型为Kelvin-Voigt模型[7],该模型用一组平行的线性弹簧阻尼单元描述法向碰撞特性,其中用线性阻尼器来衡量碰撞过程的能量损耗,但模型中阻尼器系数是非零常数,导致在碰撞刚开始时,出现了变形量为零而接触碰撞力大于零的现象,与实际情况不符。为了能够克服Kelvin-Voigt线性弹簧阻尼模型的局限性,Hunt等[8]、Lankarani等[9]、Gonthier等[10]、秦志英等[11]、Flores等[12]提出了一系列改进的模型;但是,上述各种碰撞力模型均基于Hertz基础理论建立,仅适用于大间隙、小载荷,且恢复系数接近1的工况[13,21-23]。白争锋等[14]在改进弹性基础模型基础上提出了一种改进的非线性法向碰撞力混合模型,并基于该模型进行了相关分析研究[15];王旭鹏等基于文献[6]的基础上提出了一种考虑铰链轴向尺寸,且计算过程不需要恢复系数的、近似的法向碰撞力模型,并结合数值仿真以及实验数据对比验证了模型的有效性[16];之后,该团队进一步对文献[16]中的模型进行改进,提出了另外一种法向碰撞力模型,并通过不同间隙、初始碰撞速度及不同恢复系数下的对比分析,发现改进模型在不同工况下均比L-N模型具有更高的精度[17]。
本文基于初始碰撞速度和材料屈服强度,建立了一种变恢复系数,进而建立了一种改进的接触碰撞力模型,以轴-轴承、球-球、球-圆柱以及平面曲柄滑块机构为例,通过大量数值模拟和实验测试,对改进模型进行了验证。
1 接触碰撞建模
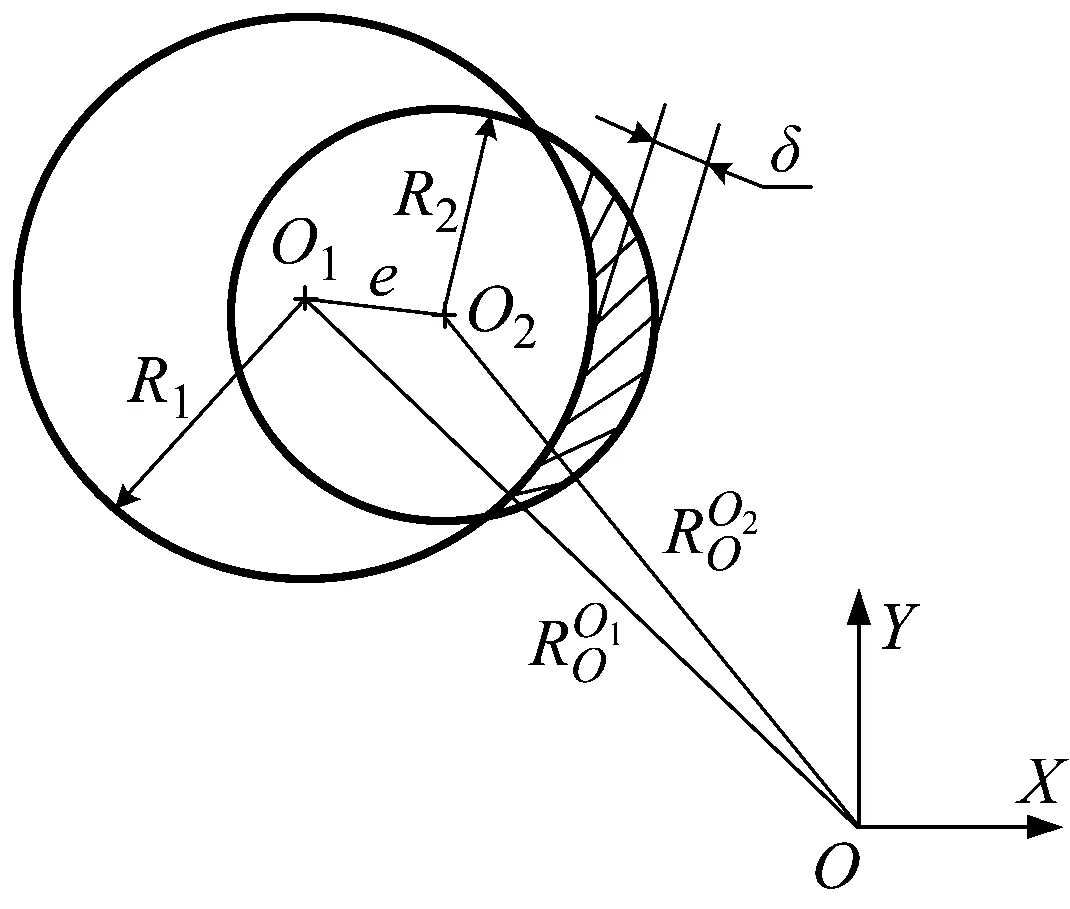
准确的描述接触碰撞现象,是建立接触碰撞力和进行机械系统中接触碰撞分析的基础所在。如图1所示,机械系统中的接触碰撞现象可分为2种情况:外碰撞、内碰撞。

(a) 外接触
(b) 内接触
由图1可知
ΔR=R1-R2
(1)
式中,R1、R2为接触碰撞体的半径。
碰撞体中心点的偏心向量为
(2)
对应的偏心距离为
(3)
发生碰撞时,碰撞体间的弹性变形量为
(4)
当δ≥0时,表示碰撞体间发生接触和碰撞现象。
2 改进的接触碰撞力模型
当发生接触碰撞时,将在接触面产生接触力;建立准确的接触力模型,对于研究接触碰撞效应,以及其对机械系统动态特性的影响起到至关重要的作用。
目前,在进行接触碰撞分析时,使用最广泛的是L-N模型,但该模型更适用于大间隙、小载荷且恢复系数接近1的工况;Wang等进一步提出了改进的接触力模型,该模型不受间隙和载荷的影响,且在较小的恢复系数下也有较高的精度。需要指出的是:上述模型均假设接触碰撞过程恢复系数是固定不变的;但事实上,材料屈服强度和初始碰撞速度对恢复系数影响较大[18-19],Stammers等通过实验测试发现恢复系数与初始碰撞速度存在如下关系
(5)

为了引入材料屈服强度对恢复系数的影响,在Stammers恢复系数模型的基础上,本文提出了一种改进的变恢复系数模型
(6)
式中,K*为与材料屈服强度相关的系数;依据文献[24]中实验数据进行参数拟合,可得K*表达式如下
(7)
式中,σB1、σB2为接触碰撞材料的屈服强度。
基于(6)、(7)所示的变恢复系数,结合文献[17]提出的改进模型,本文提出了另外一种改进的接触碰撞模型,其表达式如下
(8)

(9)
式中,L为碰撞体轴向长度,E*为碰撞材料的等效弹性模量,可由下式获得
(10)
式中,E1,2和v1,2分别为碰撞材料的弹性模量和泊松比。
3 接触碰撞分析
3.1 算例1:轴-轴承
图2所示为轴-轴承模型,假设轴承固定,轴以0.5 m/s初始速度与轴承发生碰撞;为了便于和L-N模型进行对比分析,假设L-N模型分析时恢复系数分别为0.7、0.8和0.9。
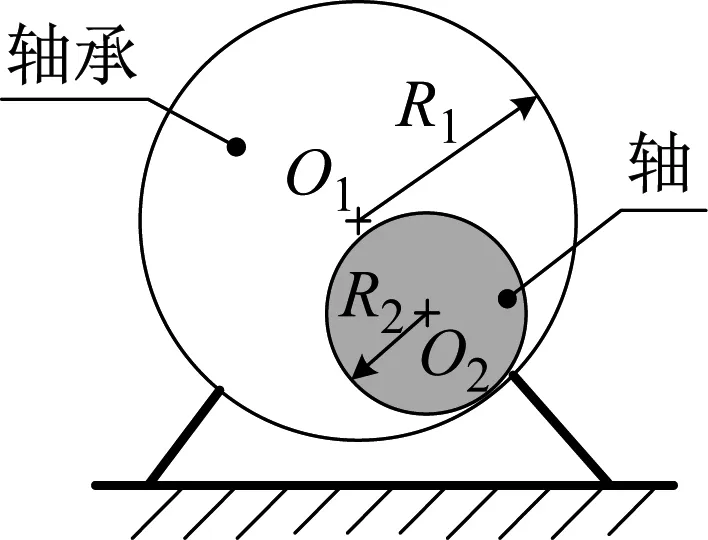
图2 轴-轴承接触碰撞模型
图3所示为数值模拟结果,分析可知:① 在轴、轴承间接触碰撞和恢复过程,改进模型模拟结果与L-N模型恢复系数为0.9时的结果更为相似,这主要是由于L-N模型更适用于恢复系数较大的工况;② 改进模型的最大变形量为5.12 μm,小于L-N模型对应结果5.65 μm,但改进模型最大接触力为2 204.5 N,大于L-N模型对应结果2 038.2 N,这主要是因为改进模型接触刚度在碰撞过程是非线性变化的,而L-N模型则为定值。

图3 数值模拟结果:变形-接触碰撞力
3.2 算例2:球-球
图4所示为完全相同的2个钢球发生接触碰撞的单摆型实验装置,在初始状态,钢球1处于竖直静止状态,钢球2以初始角度为θ0、初始速度为0在重力作用下运动;碰撞后,两个钢球相对竖直位置的角度分别为θ1和θ2;2个钢球材料参数一致,分别为:弹性模量210 GPa,泊松比0.3,屈服强度518.4 MPa。

图4 球-球接触碰撞模型
为了准确地对数值模拟结果和实验测试数据进行对比,验证改进模型的有效性,借助牛顿冲击理论的恢复系数模型,对数值和实验测试结果进行对比分析,该模型可表示为
(11)

图5和表1所示为不同初始速度下,数值模拟和实验测试恢复系数及二者相对误差。分析可知,数值模拟结果和实验测试结果基本吻合,二者间相对误差均小于10%,进一步验证了本文新模型的正确性。

图5 碰撞恢复系数结果
Fig.5 Results of restitution coefficient based on experimental and numerical

(12)
式中,ρ为碰撞体材料的密度。

表1 数值模拟和实验测试的恢复系数及二者相对误差
3.3 算例3:曲柄滑块机构
图6所示为平面曲柄滑块机构[20]。假设连杆与滑块间铰链处存在规则径向间隙,其余各处均为理想约束。表2所示为机构几何参数和质量特性参数,数值模拟参数如表3所示。
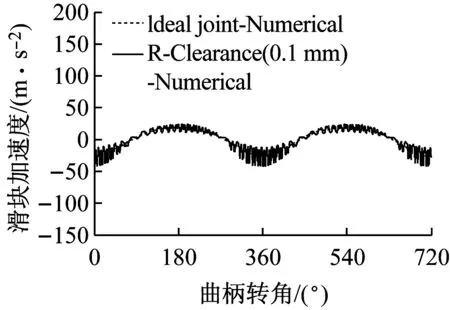
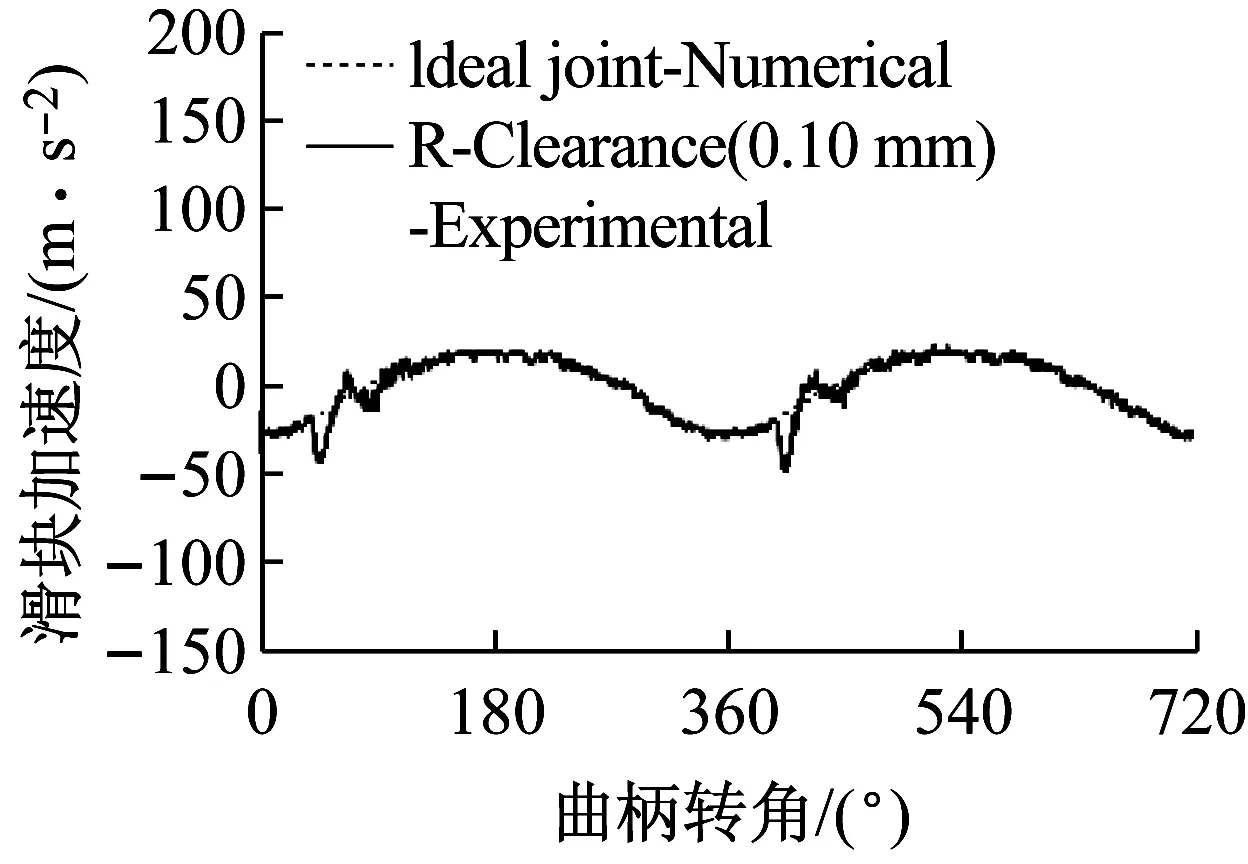
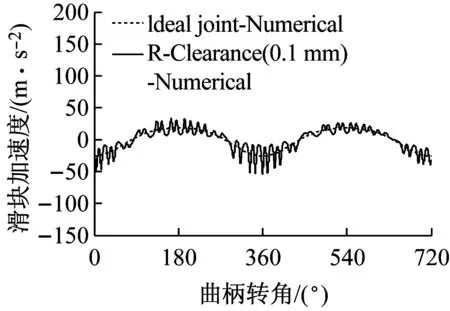
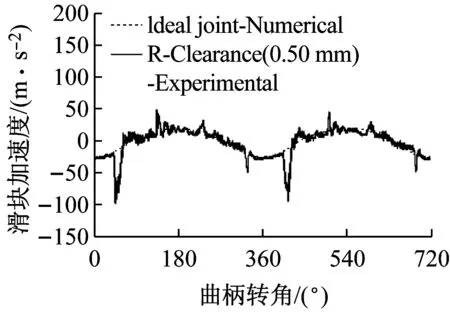
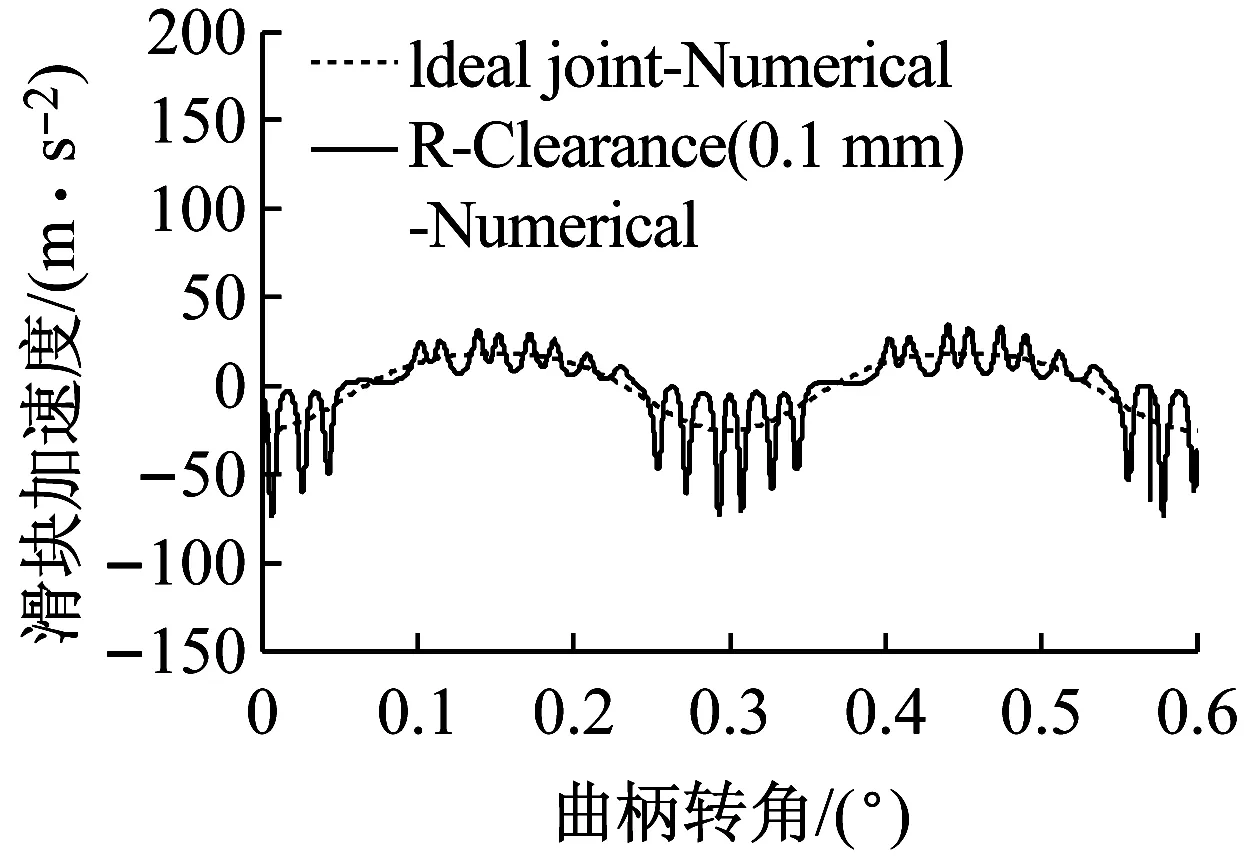
假设连杆与滑块间干摩擦铰链处径向间隙分别为0.1 mm、0.5 mm及1 mm,曲柄转速恒定为200 r/min;同时,忽略杆件弹性变形影响;数值模拟时,间隙铰链处摩擦力采用修正的库伦摩擦力表示;图7所示为数值模拟和参考文献[20]对应实验测试结果。
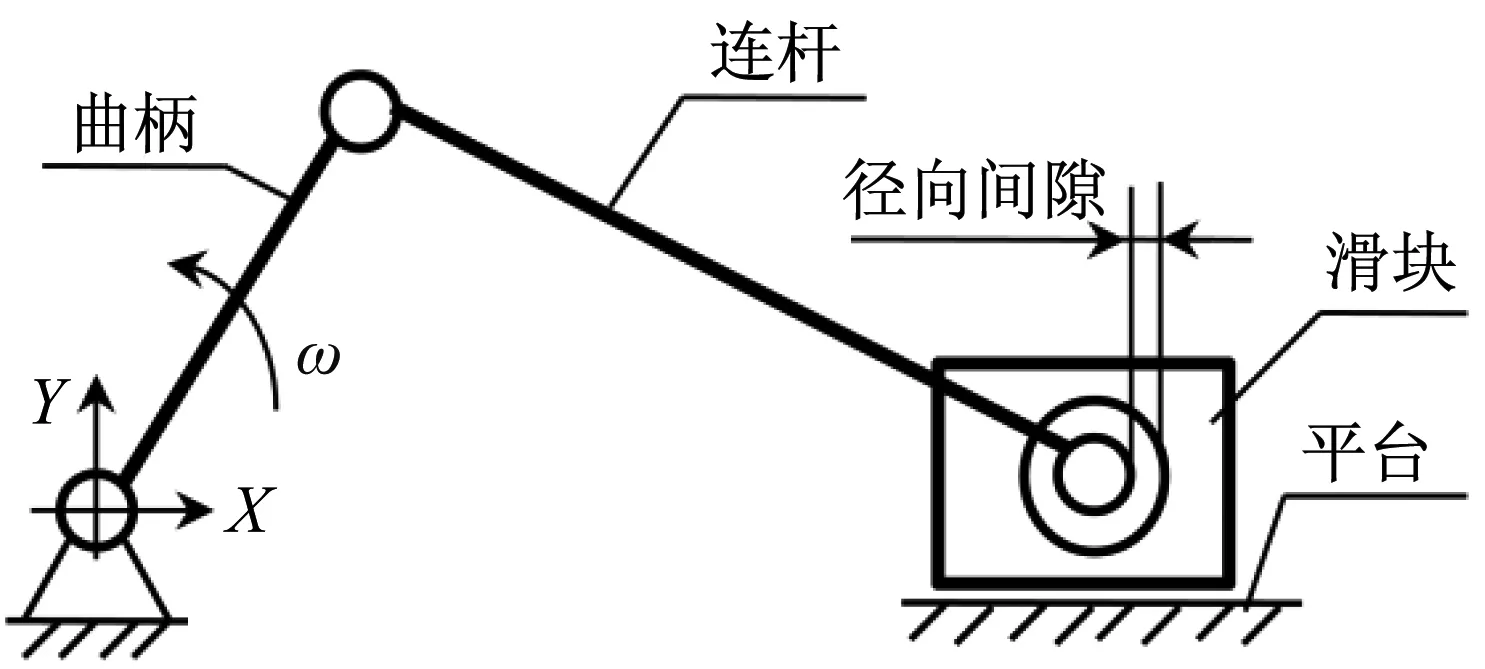
图6 含间隙铰链曲柄滑块机构模型

(a) c=0.1 mm
(b) c=0.1 mm
(e) c=0.5 mm
(f) c=0.5 mm
(g) c=1 mm

(h) c=1 mm
由图7可知:(1)基于本文变恢复系数接触碰撞力模型的数值模拟结果,与文献[20]对应的实验测试结果在趋势性和量级上均吻合较好,再次验证本文接触碰撞力模型的准确性和有效性;(2)间隙铰链处接触碰撞现象对滑块加速度影响显著,较理想无间隙加速度曲线出现了明显的振荡;(3)随着间隙值的增大,振荡幅值依次增大,但振荡的频率逐渐降低。
4 结 论

