载波频率不一致且频谱严重交叠干扰下的盲自适应多用户检测试验研究
2019-03-13葛威殷敬伟杨光郑茂醇李恩玉
葛威, 殷敬伟, 杨光, 郑茂醇, 李恩玉
(1.哈尔滨工程大学 水声技术重点实验室, 黑龙江 哈尔滨 150001; 2.哈尔滨工程大学 海洋信息获取与安全工业和信息化部重点实验室, 黑龙江 哈尔滨 150001; 3.哈尔滨工程大学 水声工程学院, 黑龙江 哈尔滨 150001; 4.青岛理工大学 信息与控制工程学院, 山东 青岛 266000)
0 引言
由于全球变暖,北极海冰开始消融,北极地区丰富的自然资源和独特的战略地位引起了世界海洋大国的高度关注。与冰区军事情报监听和冰区群体作战有关的冰区多用户通信技术需求极为迫切。冰区多用户通信与非冰区多用户通信的上边界不同,冰区上边界是冰面,可近似看成是绝对硬界面;而非冰区上边界是水面,可近似看成是液态的绝对软界面[1]。冰区和非冰区对应的信道将对多用户通信产生不同影响,因此,必须针对冰区多用户通信产生的多途干扰(码间干扰)和多址干扰(MAI)问题进行研究。
水声信道多途时延严重,进行水声通信时会产生严重的码间干扰(ISI),同时引起频率选择性衰落以及信号畸变。如果多个水下用户同时通信,将产生MAI,接收信号波形畸变更加严重[2]。针对ISI和MAI问题,国内外很多机构进行了水声多用户通信的研究,进行了相关的外场试验验证,获得了良好效果[3-27]。虽然国内外已经进行了大量水声多用户通信技术研究,但据目前所知,并没有机构进行适用于水声信道的盲多用户通信技术研究。盲自适应多用户检测(BAMUD)算法,避免水声信道多途数和时延估计,提升了频谱利用率,避免了信道估计带来的误差。BAMUD算法仅需获得期望用户同步头即可解调进行迭代运算实现ISI和MAI抑制,直接检测出期望用户数据信息。多用户检测是指利用扩频序列的已知结构信息与统计特性,采取一定的信号处理手段消除其他用户对期望用户的干扰,实现期望用户有效通信。因此,2016年,将BAMUD算法与虚拟用户技术相结合,提出了适用于水声通信网的基于卡尔曼滤波(KF)BAMUD(KF-BAMUD)算法,避免信道估计前提下,解决了ISI和MAI问题[28]。由于ISI与MAI本质上均为用户数据叠加,具有形式上的一致性,因此虚拟用户技术把ISI虚拟成MAI,即把多途都看成干扰用户。虚拟用户技术将信道均衡环节和MAI抑制环节两个环节合二为一,简化了多用户通信系统结构。文献[3-28]适用场景如图1(a)所示,3艘静止的水下潜器同时向一艘静止的水下潜器发送数据。
冰区和非冰区的上边界不同,其对应的冰下声信道会明显不同,因为冰下远距离试验难以开展,所以相关冰区信道特性报道较少。2017年,朱广平等[29]进行了北极典型冰下声信道建模及特性研究,分析了理论模型下的冰层对声的传播特性影响,并在同年,将盲算法引入到冰区,将冰区看成一个黑箱子。因为盲算法具有免信道估计特性,避免了信道多途参数的估计,因此采用盲算法进行冰区多用户通信研究。在避免信道估计的前提下,解决了当干扰用户幅值剧烈变化时,冰区多用户通信的ISI和MAI问题[30]。文献[30]适用场景如图1(b)所示,期望用户静止、干扰用户上浮和干扰用户下潜时,同时向静止的水下潜器传输数据。
本文对BAMUD算法进行了延伸性研究,研究了BAMUD算法在各用户中心频率不一致时,扩频多用户解码彻底失效,各用户频谱严重交叠情况下的有效性。在渤海和渤海结冰期进行了载波频率不一致下的多用户通信试验,良好试验结果验证了所提算法在载波频率不一致情况下的有效性,进一步扩展了BAMUD算法的适用范围。本文适用场景如图1(c)所示,期望用户静止,干扰用户上浮远离接收端和干扰用户下潜靠近接收端时,同时向静止的水下潜器传输数据。
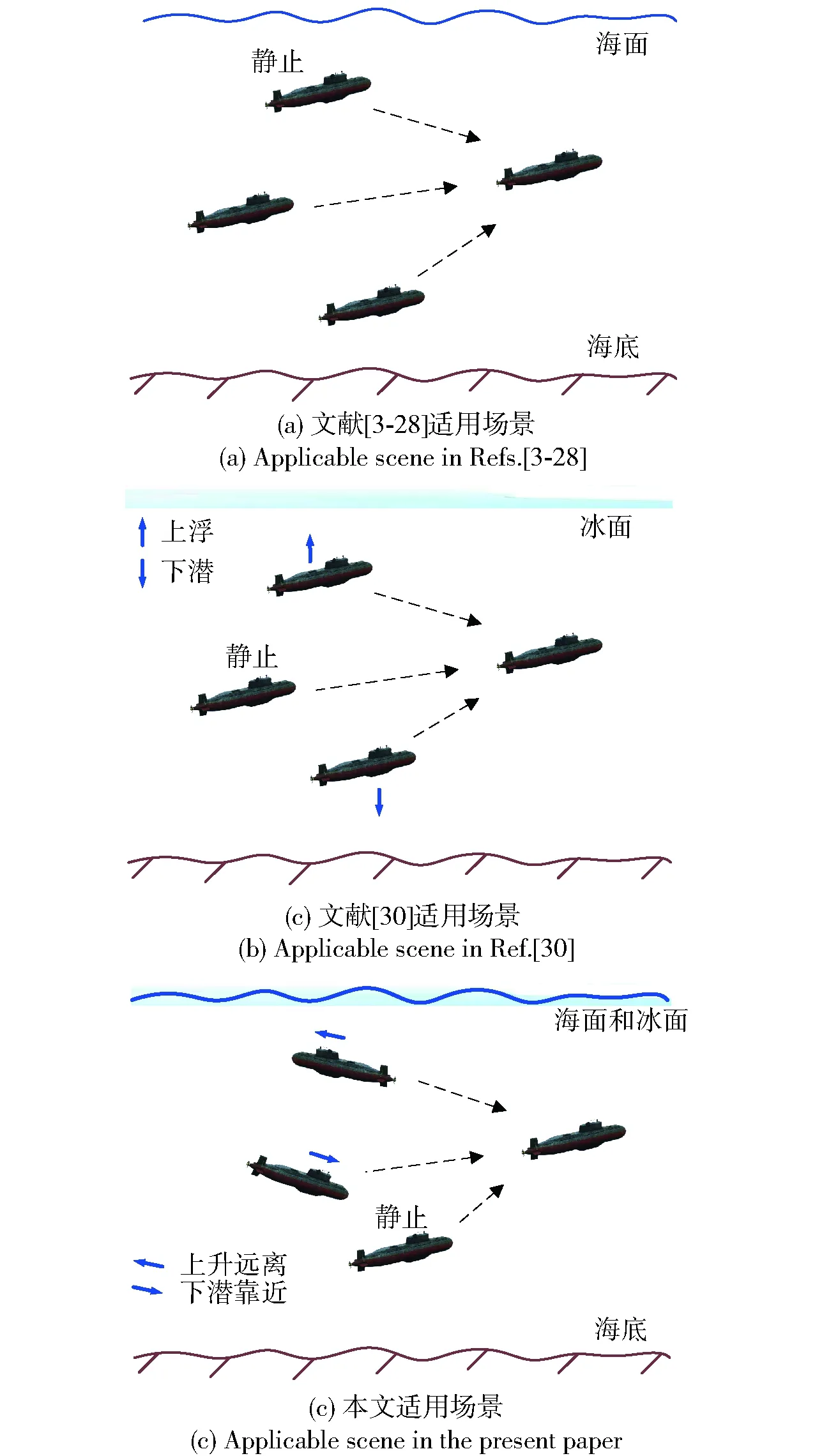
图1 本文和其他文献适用场景对比Fig.1 Comparison of applicable scenes in the present paper and other references
1 BAMUD算法基本原理
构建静态多用户通信接收信号模型。考虑含有K个用户的多用户通信系统,含加性高斯白噪声,不失一般性,指定用户1为期望用户,则接收一个符号长度的信号可表示为
(1)
设期望用户静止,干扰用户水平移动,定义Δωk为第k个虚拟用户的多普勒频偏,可得接收信号模型
(2)
从(2)式可看出:与静态多用户通信接收信号模型(1)式相比,期望用户数据信息形式一致,虚拟干扰用户数据信息仅多一个乘积项,所以从理论上来看,载波频率不一致时,BAMUD算法依然有效。(2)式右侧第二项多普勒频偏可以为任意值。当多普勒频偏都为0 Hz时,(2)式变成(1)式,载波频率都一致情况下的虚拟MAI问题已经在文献[28,30]中解决。本文延伸了BAMUD算法的适用范围,解决了载波频率不一致情况下的虚拟MAI问题,即解决了虚拟干扰用户多普勒频偏任意值下的虚拟MAI问题。
将用户1的任意线性BAMUD器设为c1(n),因此,在第n个符号间隔的b1(n)判决为
(3)
因为KF-BAMUD算法是盲算法,因此并不需要估计出Ak和K,其相应的多用户检测器[28-30]为
(4)
KF-BAMUD算法的剩余平均输出能量为0[31],因此基于KF-BAMUD算法进行多用户通信时,理论上可接近单用户通信时的性能,很明显消除了干扰影响。
多用户通信系统结构如图2所示,图中ωc为载波频率。该系统由发射部分和接收部分构成,假定用户1为期望用户,期望用户无多普勒频偏。发射端将期望用户信源信息进行扩频编码,然后调制到载波频率上,通过换能器发出;接收端首先对其进行带通滤波,将带通两侧噪声滤除,随后进行载波解调得到基带信号,将基带信号与BAMUD算法构建的检测器(BAMUD检测器)进行内积运算,最后判决出期望用户数据信息。
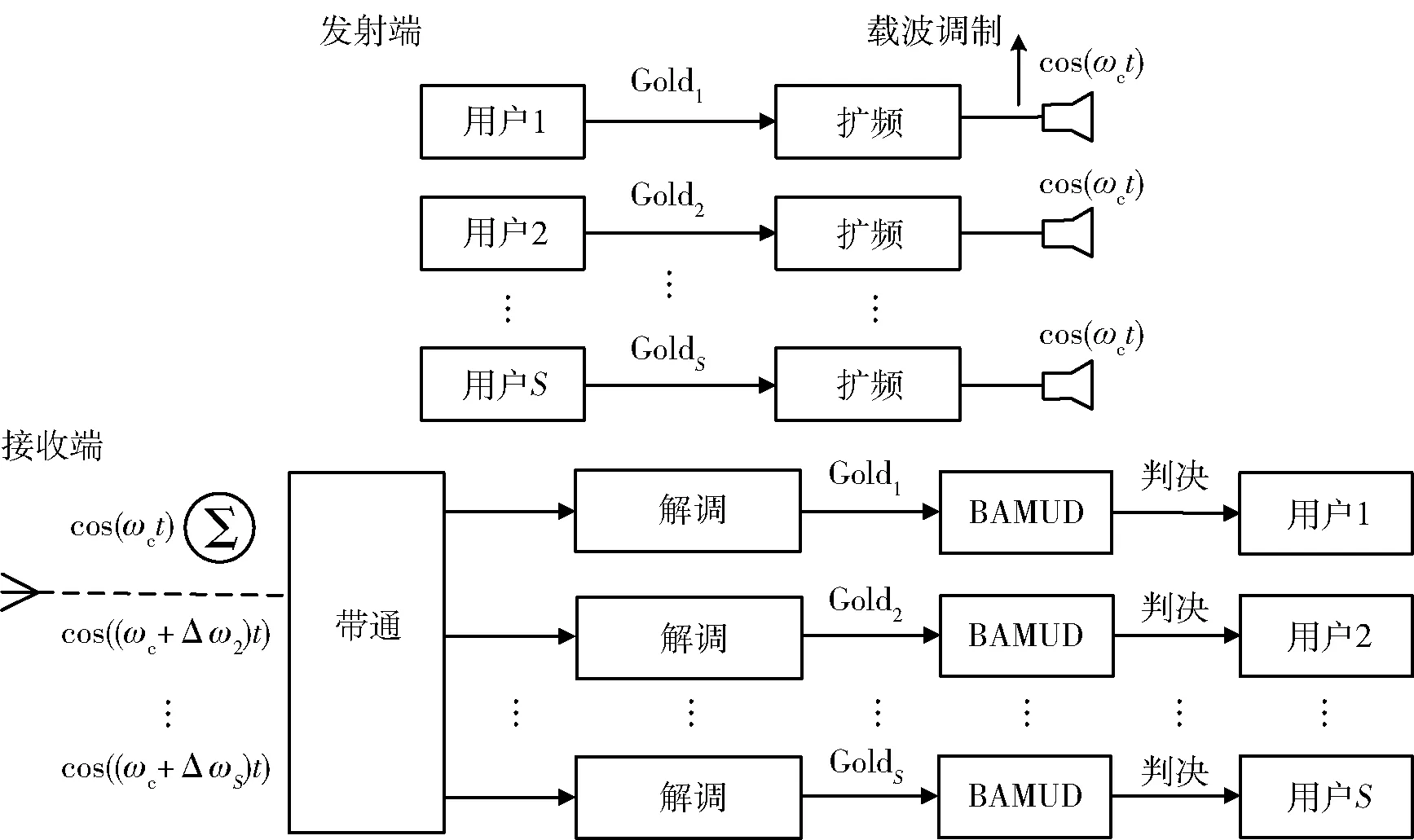
图2 多用户通信系统结构Fig.2 Structure of under-ice multiuser communication system
2 试验验证
2.1 渤海试验
信干比(SIR)定义为
(5)
式中:Pe为接收期望用户功率;Pi为接收干扰用户功率。
2015年7月在渤海进行4个用户通信试验。标量水听器布放在水下4 m,扩频增益为127,每个用户都发射60个数据,时长接近5.1 s. 载波频率为6 kHz,采样频率为48 kHz,带宽为1.5 kHz,码元速率11.8 bit/s. 期望用户1布放在水下4 m(其多途虚拟用户载波频率和期望用户载波频率相同,无多普勒频偏),与水听器水平距离3 km;干扰用户2、用户3、用户4布放深度随机,分别在30~50 m、50~90 m、100~150 m处以1~2 m/s变速远离接收端(干扰用户及相应多途虚拟用户载波频率和期望用户载波频率不同,多普勒频偏不为0 Hz)。水听器接收到的期望用户载波频率为6 kHz;干扰用户2、用户3、用户4的载波频率范围为5.992~5.996 kHz. 4个用户通信时,期望用户SIR为-14 dB. 现场布放如表1和图3(a)所示,期望用户信道脉冲响应如图3(b)所示。因为干扰用户为变速移动通信,所以很难准确获得信道脉冲响应。算法星座图及误码率(BER)如图4所示。对单用户通信来说,KF-BAMUD算法和解相关(DE-CORR)算法BER都为0.4个用户通信时,KF-BAMUD算法、LMS-BAMUD算法[32]、RLS-BAMUD算法[33]BER都为0,DE-CORR算法BER为51.7%.
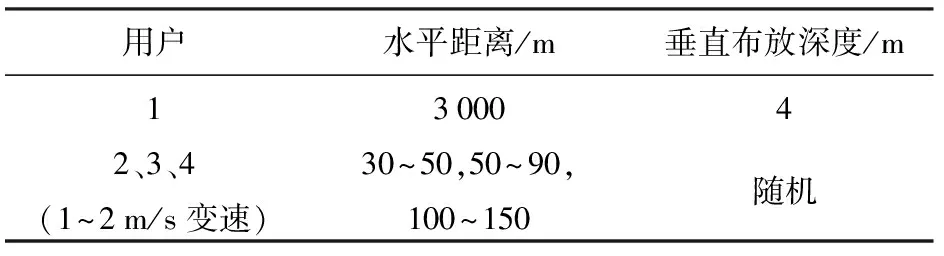
表1 用户1、用户2、用户3、用户4和水听器 相对位置

图3 现场布放和信道脉冲响应Fig.3 Field deployment and channel impulse response
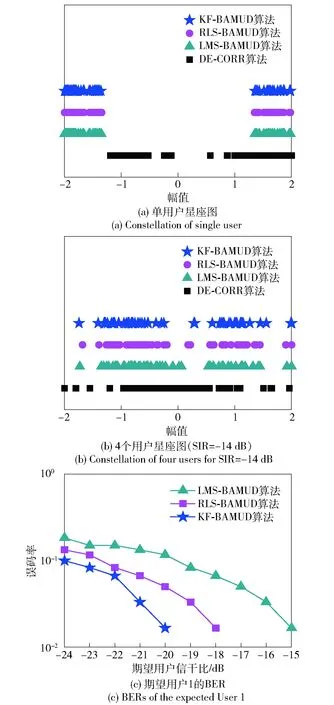
图4 期望用户1星座图及算法BERFig.4 Constellation and BER of the expected User 1
图4(a)表明BAMUD算法可有效抑制ISI;图4(b)表明BAMUD算法也可有效抑制MAI;图4(c)表明:当干扰用户移动时,即干扰用户与期望用户载波频率不再一致时,KF-BAMUD算法依然有效,依然可有效解决ISI和MAI问题,其解码性能好于LMS-BAMUD算法和RLS-BAMUD算法。
2.2 渤海结冰期试验
2016年1月渤海结冰期进行7个用户通信试验。标量水听器布放在冰下6 m,扩频增益为127,每个用户都发射75个数据,时长接近4.76 s. 载波频率为10 kHz,采样频率为96 kHz,码元速率为15.7 bit/s. 期望用户1布放在冰下6 m(其多途虚拟用户载波频率和期望用户载波频率相同,无多普勒频偏),与水听器水平距离为1.2 km;干扰用户2、用户3、用户4、用户5、用户6、用户7布放深度随机,与水听器初始水平距离为1.2 km;干扰用户2、用户3静止发射(载波频率和期望用户载波频率相同);干扰用户4、用户5以1 m/s速度下潜发射(幅值剧烈变化);干扰用户6、用户7以1 m/s速度上浮发射(幅值剧烈变化);人为调整干扰用户4、用户5的接收信号,模拟其以3 m/s速度接近接收端效果(幅值剧烈变化前提下,载波频率和期望用户载波频率不同,多普勒频偏不为0 Hz);同时人为调整干扰用户6、用户7的接收信号,模拟其以6 m/s速度远离接收端效果(幅值剧烈变化前提下,载波频率和期望用户载波频率不同,多普勒频偏不为0 Hz);与期望用户波形相比,干扰用户4、用户5接收信号波形是压缩的,干扰用户6、用户7接收信号波形是拉伸的。水听器接收到的期望用户和干扰用户2、用户3的载波频率为10 kHz(多普勒频偏为0 Hz);干扰用户4、用户5的载波频率为9.98 kHz(多普勒频偏小于0 Hz);干扰用户6、用户7的载波频率为10.04 kHz(多普勒频偏大于0 Hz)。多用户通信时期望用户SIR为-14 dB. 布放如图5(a)和表2所示。信道脉冲响应如图5(b)所示,深绿色信道为期望用户信道,粉色信道为干扰用户2、用户3、用户4、用户5、用户6、用户7的信道。虚拟用户示意如图5(c)所示:棕色线左侧,期望用户1的深绿色最高峰为虚拟期望用户;棕色线右侧,深绿色次高峰为期望用户的ISI. 本文把期望用户的ISI看作是虚拟干扰用户,该虚拟干扰用户多普勒频偏为0 Hz. 粉色峰都看作虚拟干扰用户,这些虚拟干扰用户既含有多普勒频偏为0 Hz的MAI,又含有多普勒频偏大于0 Hz和小于0 Hz的MAI.
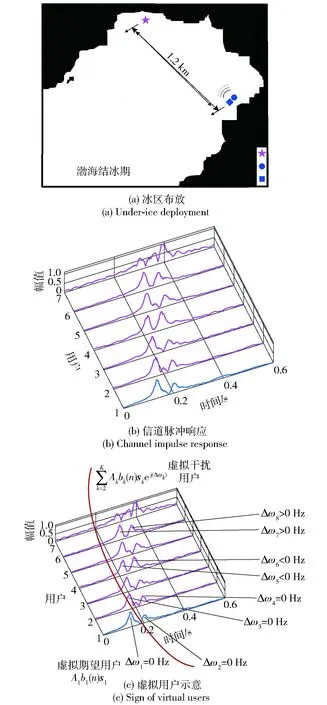
图5 现场布放和信道脉冲响应Fig.5 Field deployment and channel impulse response
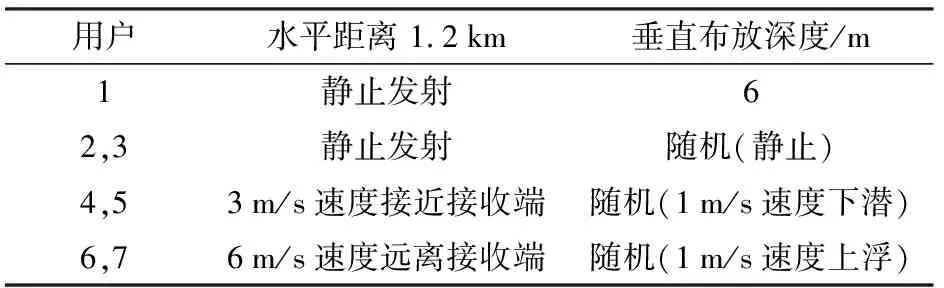
用户水平距离 1.2km垂直布放深度/m1静止发射62,3静止发射随机(静止)4,53m/s速度接近接收端随机(1m/s速度下潜)6,76m/s速度远离接收端随机(1m/s速度上浮)
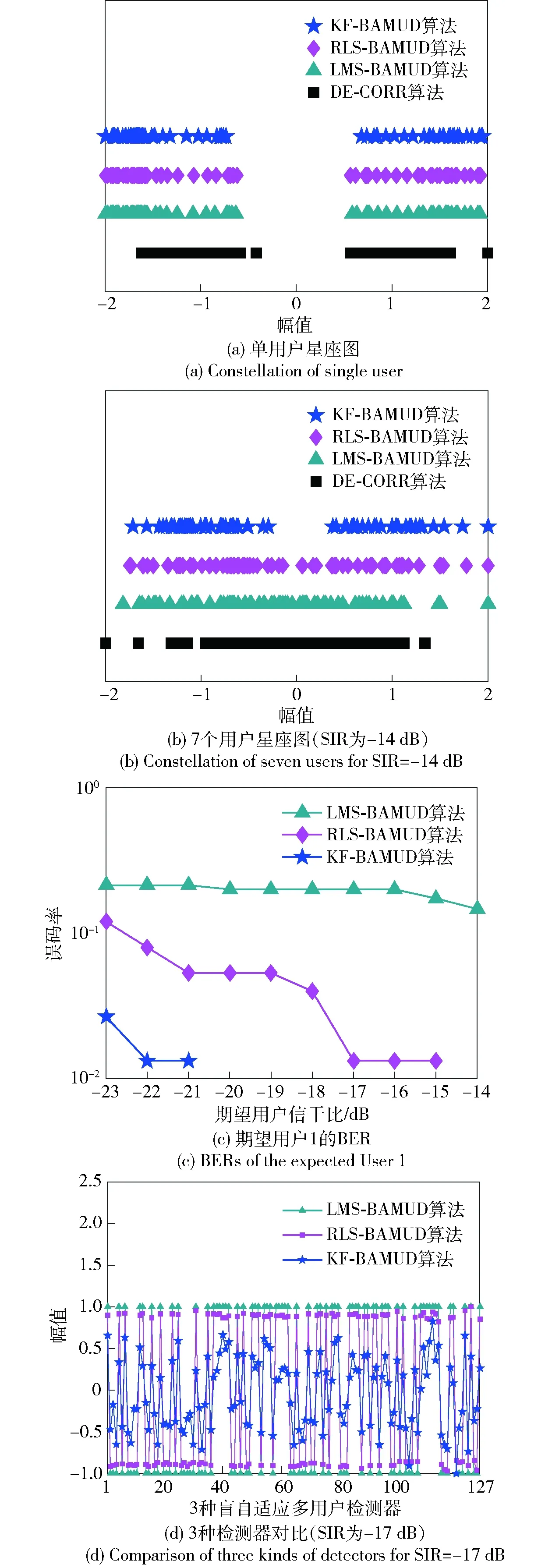
图6 期望用户1星座图、BER和检测器Fig.6 Constellations, BERs and detectors of the expected User 1
单用户和多用户通信星座图及BER如图6(a)、图6(b)和图6(c)所示。单用户通信时,BAMUD算法和DE-CORR算法BER都为0;7个用户通信时,RLS-BAMUD算法和KF-BAMUD算法BER依然为0,而LMS-BAMUD算法和DE-CORR算法失效了。SIR为-17 dB时,LMS-BAMUD算法、RLS-BAMUD算法和KF-BAMUD算法的BER分别为20%、4%和0. 3种检测器对比如图6(d)所示,3种波形存在着一定差异,从而导致了抑制干扰能力的不同。
SIR为-20 dB时,添加随机高斯白噪声去调整期望用户1的信噪比,测试300组,期望用户1的BER如图7所示。

图7 3种算法的BER对比(SIR为-20 dB)Fig.7 BERs of three kinds of algorithms for SIR=-20 dB
从渤海结冰期试验可看出:所提算法可同时有效解决虚拟干扰用户多普勒频偏等于0 Hz、小于0 Hz和大于0 Hz时的虚拟MAI问题。当干扰用户幅值剧烈变化并且与期望用户载波频率不再一致时,BAMUD算法可有效解决ISI和MAI问题,其中KF-BAMUD算法性能最好。在低SIR时,KF-BAMUD算法依然有效,表明该算法具有很好的抗干扰性能;在SIR恒定时,人为加入随机高斯白噪声,该算法依然具有良好性能,表明该算法具有很好的抗噪性能。
3 结论
本文提出了BAMUD算法,解决了多用户通信载波频率不一致下的ISI和MAI问题。采用虚拟用户技术,实现了信道均衡环节和MAI抑制环节的合二为一,简化了多用户通信的系统结构。采用BAMUD算法,解决了载波频率不一致情况下的ISI和MAI问题。渤海和渤海结冰期试验表明:无论干扰用户上浮、下潜、靠近接收端或远离接收端情况下,所提算法都可有效解决ISI和MAI问题,实现多用户通信。
