机器人与胸腔镜肺叶切除术在治疗早期非小细胞肺癌的安全性与疗效对比
2019-03-08郭洪拨喻本桐
郭洪拨 喻本桐
南昌大学第一附属医院胸心外科(南昌330006)
在我国,肺癌发生率居高不下,其发病率和病死率在男性常见恶性肿瘤中占首位,在女性常见恶性肿瘤中占第二、三位[1],只有30%的早期及局部进展期肺癌有手术根治机会,随着技术革新与进步,肺癌的手术方式也在不断的更新换代,毫无疑问,过去30年外科手术的最大进展是内窥镜技术的发展。第一个胸腔镜由HANS CHRISTIAN JACOBAEUS 完成,他在19世纪末修改了膀胱镜,并直接观察胸壁与肺粘连,以促进气胸和肺结核的治疗。到20世纪90年代早期,视频辅助胸外科(video-assisted thoracic surgeqry,VATS)替代开胸手术,改变了人们对胸外科手术方式的认识。胸腔镜手术在胸部手术方面的优点已在以往文献中得到了充分的证实。近年来,逐渐兴起的达芬奇机器人手术弥补常规胸腔镜的一些缺陷。机器人系统能提供三维立体的画面,使外科手术达到了空前的精准性。此外,机器人的器械拥有接近人手的活动范围度以及能在极小的空间内超过360°的移动(内腕技术)[2]。对解剖肺切除术的机器人方法是最新的微创平台,多项研究已经证明其可行性和安全性[3-5]。从理论上讲,三维高清可视化、平台稳定性、灵活性和精确性都应该促进淋巴结清扫[6]。机器人手术技术已经逐步成熟,机器人肺叶切除术也积累了大量的经验,然而,国内外关于机器人肺切除术的数据非常有限。
1 资料与方法
1.1 一般资料 选取南昌大学第一附属医院胸心外科同一手术组2016年1月至2018年1月期间行肺叶切除术+常规淋巴结清扫治疗的早期非小细胞肺癌患者的临床资料,排除不同外科医生对淋巴结清扫标准掌握和围手术期管理的不同而造成的影响。纳入标准:(1)术前诊断为肺部占位,未发现淋巴结转移并肿块≤4 cm;(2)完善的CT 影像资料,包括头颅CT、全身骨扫描和胸部增强CT;(3)手术方式为机器人手术或胸腔镜手术;(4)术前心、肺、肾等重要脏器无禁忌,患者可耐受手术;(5)无肺脏手术史。排除标准:(1)手术方式非解剖性肺叶切除加纵隔、肺门淋巴结清扫术者;(2)拒绝手术治疗者;(3)术后病理为小细胞肺癌,良性病变或转移癌。
为了减少混杂因素的影响,减少术中、术后的独立危险因素,术前两组患者依年龄(±5 岁)和与术后并发症相关的基础疾病史配对。为了避免研究中的偏倚,本组手术主刀医生不知本研究,并且两组手术医生为同一组医师。符合入选标准拟行肺叶切除术的患者非随机性分配进入机器人组和胸腔镜组。两组患者术前均行相同的术前准备,包括呼吸功能锻炼、戒烟、雾化吸入等。
1.2 手术方法 对于机器人肺切除手术来说,除主刀医生在操作台进行操作,仍需要一个助手协助。均使用助手辅助操作切口的模式,即腋中线第8 肋间置 入12 mm 腔镜TROCA 置人3D 胸腔镜,第四肋间腋前线、第8 肋间肩胛线作为机械臂操作空,助手辅助操作孔选择在第6 肋间肋缘处(或剑突下切口)。
全胸腔镜手术采用三切口,主操作口位于第4、5 肋间腋前线长约4 cm,辅助操作口位于肩胛下角线第7 肋间长约1.5 cm,观察口位于腋中线第7肋间长约1.5 cm,不撑开肋骨。术毕,两组患者均进入胸心外科重症监护室行呼吸机辅助呼吸,心电监护等,按常规拔出气管插管,待病情稳定迁入普通病房,常规给予抗炎,阵痛,雾化吸入,营养支持治疗。常规记录患者每日引流量,体温,术后根据胸腔闭式引流量(<100 mL)及X 线胸片情况(肺复张好,无明显积气、积液)拔除胸腔闭引流管。
1.3 观察指标及数据
1.3.1 CT 数据 CT 数据来源于南昌大学第一附属医院CT 室,包括精确测量病变大小,测量纵膈及肺淋巴结的大小,以淋巴结短径>1 cm 作为CT判断淋巴结有无转移的标准。
1.3.2 病理数据 标本处理由南昌大学第一附属医院按照病理学常规进行标本的加工处理:取材、切片、染色、镜下读片等。按照术中探查情况及术后病理结果回报再次进行TNM 分期。应用Microsoft Excel 工作表制定相应的数据收集表格,将数据输入到Microsoft Excel 工作表中建立数据库,进行进一步的研究分析。
本研究确定的评价指标包括淋巴结清除数、淋巴结升期,手术时间、术前准备时间、术后第2天疼痛评分、术中(术中大出血、术中出血量)、引流时间、术后住院时间以及术后情况并发症(胸膜支气管瘘、术后漏气超过5 d、静脉血栓、肺不张、肺部感染)。两组患者均采用国际抗癌联盟(UICC)最新版肺癌TNM 分期标准(第八版分期)和美国癌症联合委员会行治疗前综合临床全部信息基础上的临床分期(cTNM stage)和综合手术标本病理结果及术中探查结果的外科病理分期(pTNM stage)[7-8]进行分期和统计。
1.4 统计学方法 应用SPSS 23.0 进行数据处理,组间比较采用t检验,计数资料比较采用卡方检验。P<0.05 为差异有统计学意义。建立交叉表,胸腔镜肺叶切除术和机器人肺叶切除术的淋巴结清扫数目,淋巴结升期,术中出血量,引流时间,术后住院时间及术中大出血,胸膜支气管瘘,术后漏气超过5 d,静脉血栓,肺不张,肺部感染的差别。
2 结果
2.1 两组患者术前基本资料对比 见表1。两组患者术后病理类型胸腔镜组(腺癌25 例,鳞癌20例,腺鳞癌5 例,其他6 例)和机器人组(腺癌40例,鳞癌7 例,腺鳞癌6 例,其他4 例)差异无统计学意义(P>0.05)。根据2017年美国胸科医师学会(American College of Chest Physicians,ACCP)肺癌诊疗指南建议,肺癌根治至少需要完成3 组淋巴结清扫[9],本研究两组病例都达到诊疗规范的要求。对比机器人和胸腔镜淋巴结升期,有8.52%的绝对差异,但差异没有统计学意义(P>0.05,表2)。
表1 患者基本资料Tab.1 Basic information of patients ±s,[例(%)]
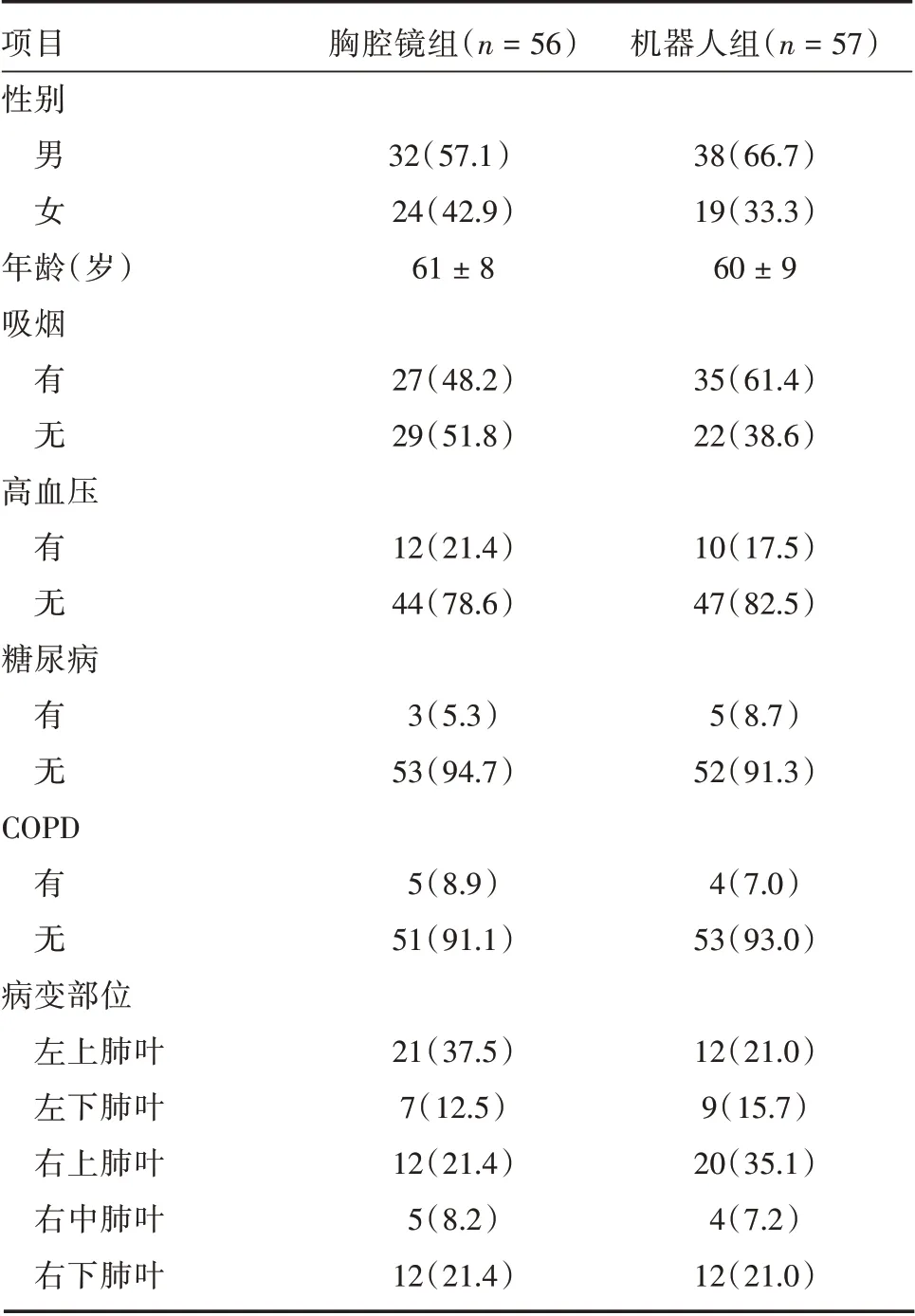
表1 患者基本资料Tab.1 Basic information of patients ±s,[例(%)]
项目性别男女年龄(岁)吸烟有无高血压有 无糖尿病有 无COPD有 无病变部位左上肺叶左下肺叶右上肺叶右中肺叶右下肺叶胸腔镜组(n=56)32(57.1)24(42.9)61±8 27(48.2)29(51.8)12(21.4)44(78.6)3(5.3)53(94.7)5(8.9)51(91.1)21(37.5)7(12.5)12(21.4)5(8.2)12(21.4)机器人组(n=57)38(66.7)19(33.3)60±9 35(61.4)22(38.6)10(17.5)47(82.5)5(8.7)52(91.3)4(7.0)53(93.0)12(21.0)9(15.7)20(35.1)4(7.2)12(21.0)
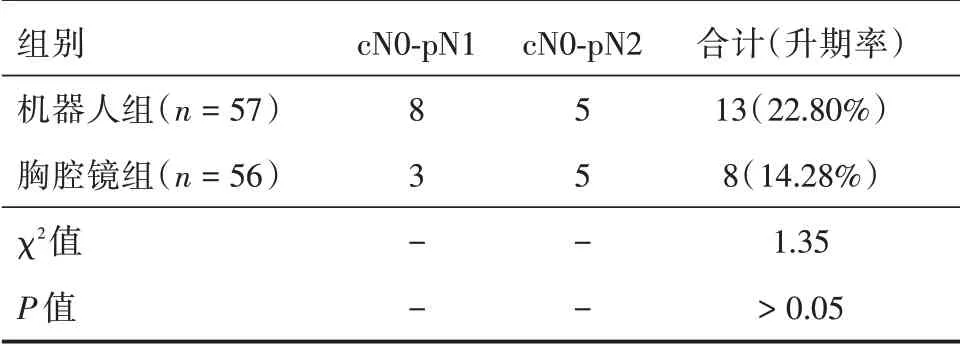
表2 两组患者淋巴结升期比较Tab.2 Lymph node ascending stage was compared between the two groups 例
2.2 两组患者安全性及围手术期并发症的比较两组均未发生术中大出血,手术全部顺利完成。两组患者均未发生术后胸膜支气管瘘,静脉血栓,胸腔镜组发生术后漏气超过5 d 有6 例,肺不张3例,肺部感染6 例,并发症发生率为26.7%,机器人组患者发生术后漏气超过5 d 有2 例,肺不张1 例,肺部感染3 例,并发症发生率为10.5%;两组患者并发症经对症处理,均好转出院。机器人组并发症发生率与胸腔镜组比较差异有统计学意义(P<0.05,表3)。
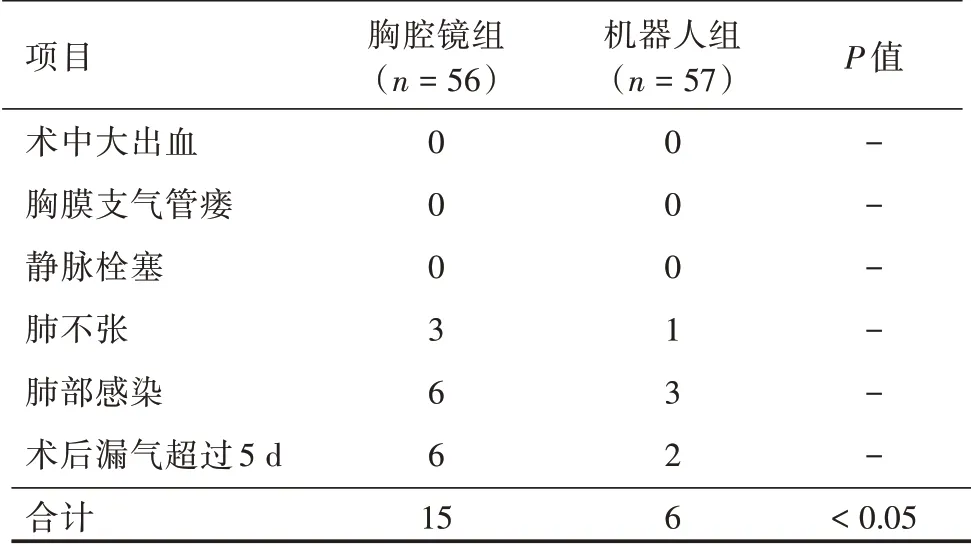
表3 两组患者围手术期并发症比较Tab.3 Perioperative complications were compared between the two groups 例
2.3 两组患者手术效果比较 在术前准备时间,术中出血量、引流时间和术后住院时间差异均有统计学意义(均P<0.05,表4)。由于术前准备时间数据只收集到机器人组37 例,胸腔镜组32 例,数据有所缺失,但术前准备事项比较固定单一所以相同手术方式的准备时间相差不大。所以本文认为差异有统计学意义。

表4 两组患者手术效果比较Tab.4 The surgical results of the two groups were compared
3 讨论
与胸外科常规开胸手术向全腔镜过渡相似,到20世纪90年代早期,VATS 正在改变人们对胸外科手术方式的认识,以替代开胸手术。来自外科医生协会的最新统计数据显示,尽管自1991年以来有技术可用,但在美国所有的肺叶切除术中只有32%是由胸腔镜完成的[10]。当时胸腔镜肺叶切除术的低普及率令人费解,因为它在手术方面的优点已经在文献中得到了充分的证实[11-13]。直到2007年,SWANSON 等[14]发 表了 前瞻 性 研究(CALGB 39804),该研究确定了胸腔镜肺叶切除术的手术原理,同时也证明了胸腔镜手术的优势和可行性。现在机器人手术面临同样的问题,主要包括两个方面即手术的效果和手术的安全性,淋巴结的升期可以被认为是手术的完整性和手术质量的替代物[15],本研究通过比较淋巴结升期率来反映手术效果,机器人组cN0- pN01 14.03%(8例)和cN0-pN2 8.77%(5 例)总体升期率22.80%(13 例),胸腔镜组cN0- pN01 5.35%(3 例)和cN0-pN2 8.92%(5 例)总体升期率14.28%(8 例)(P >0.05),不能否定两组升期率无差异。据PARK等[16]报道,在325 个临床I 期的患者中,有24%的患者出现了淋巴结升期(18%上升到N1,6%到N2),与本研究相接近。
本研究显示机器人手术在术后气胸,胸腔积液,肺部感染肺不张,肺部感染等术后并发症方面优于胸腔镜手术(P<0.05),也有国外研究显示围手术期并无明显差异[17-18],但手术的安全性完全可以保障。
虽然淋巴结升期可以作为质量的衡量指标,总体生存和无病生存同样重要。由于机器人手术在我国开展时间较短本次研究并未进行生存率相关问题的统计,但从国外的相关报道,关于生存的两大系列报道,分别是PARK 和WILSON。WILSON 系列[15]报道2年总体生存率为87.6%,总体无病生存率为70.2%。PARK 系列[19]报道总体5年生存率为80%,分期为IA5年生存率为91%,第IB 期为88%,第II 期29 阶段为49%。在机器人手术和胸腔镜手术的病死率之间差异无统计学意义。而FARIVAR 等[20]研究显示,机器人手术的30 d 病死率降低了(0.9%病死率VATSvs.0%死亡率RVATS,P<0.05)。随着机器人手术的数量,以及更长时间的随访关于总体生存和无病生存的数据将更加成熟。
本研究显示机器人手术与胸腔镜手术的手术时间差异无统计学意义,术前准备时间机器人组长于胸腔镜组,差异有统计学意义,这就可以解释一些国内外相关研究机器人手术手术时间是要长于胸腔镜手术时间[21],而且机器人肺叶切除术的学习曲线比胸腔镜肺叶切除术及常规开胸手术的学习曲线短[22],从技术角度来讲,机器人肺叶切除术是胸腔镜肺叶切除术的升级版,术者对机器人手术的适应能力强,所以术者的胸腔镜手术转为机器人手术的过程较短。而从常规开胸手术转化为胸腔镜的过程中,由于手术方式差别较大,需要改变的关键点就较多,故学习曲线相对较长。
关于本研究的一些不足,包括研究的样本数量有限,CT 数据虽然由同一机构诊断,但是不同医生诊断仍然有所偏差,还有CT 本身就存在误差,可能对研究数据有所影响。由于机器人手术在我国开展时间较短,本研究并没有对病人进行随访及生存率的统计。因为统计数据有限,本研究只是把非小细胞肺癌临床Ⅰ期淋巴结升期进行统计并没有把cT1a、cT1b 和cT2a 的升期分开统计,cT 阶段在肿瘤研究中具有重要的功能,每一个单独的临床T 阶段都应该细分为更准确的数据比较[15]。本研究的亮点在于两组病例均有同一名胸外科主任医师主刀同一机器人控制台和相同围手术期技术,大幅度降低手术的异质性。最后,本研究并没有手术成本效益分析,关于机器人手术的成本效益的结论,与胸腔镜手术或开胸手术相比,在没有考虑手术效用和生存期的前瞻性长期数据的情况下是没有意义的。
综上所述,在临床上,说明在手术效果方面机器人手术至少不低于胸腔镜手术。国外报道在总体生存率和无病生存率上机器人手术对于胸腔镜和开胸手术无劣势[19-20,23]。未来需要一个更多数据量和更长的研究时间来比较胸腔镜和机器人方法,就现有数据而言机器人肺切除术在技术方面优于胸腔镜肺切除术,在手术效果方面不劣于胸腔镜手术的微创手术,该技术值得进一步推广。