光伏电池最大功率点跟踪的仿真研究
2019-03-05储海兵
储海兵
(江苏昆山供电公司,昆山314100)
0 引言
随着太阳能等常规能源的日渐枯竭,绿色环保的清洁能源日益受到人们的关注。诸如太阳能之类的可再生能源在各国得到着重发展,并被广泛的应用于发电系统中去。
太阳能发电有两大类型:一类是太阳光发电(亦称太阳能光发电),另一类是太阳热发电(亦称太阳能热发电)。光伏发电是太阳能光发电的一种,它是利用半导体界面的光生伏特效应将光能直接转变为电能的一种技术,是一种将太阳能直接转变为电能的发电方式。与传统的发电方式相比,光伏发电具有节能环保、不受资源分布制约、安全可靠等很多优点,但是由于太阳光照具有不稳定性,受气候、环境影响较大,因此,光伏发电也存在着很多需要解决的难题,例如如何使光伏电池始终工作在最大功率点。
光伏电池是光伏发电的一个重要组成部分,随着太阳光照强度和温度的不断变化,光伏电池输出的电压和电流呈现出很强的非线性,在光照强度和温度一定时,光伏电池具有唯一的一个最大功率点。因此,如何在外界环境不断变化的条件下,使光伏电池的输出功率始终保持在最大功率点处成为光伏发电系统中的一个亟待解决的问题。目前,为了实现最大功率点跟踪采用了很多控制方法,如扰动观测法、增量电导法、恒压追踪法等[1-2]。
在众多方法中,扰动观察法具有实现简单,跟踪高效等特点,但是传统的扰动观察法步长固定,而步长的设置对其跟踪速度与跟踪精度有很大的影响。当步长设置较小时,达到最大功率点所需要的扰动次数较多,时间较长,达到最大功率点附近时震荡的幅度较小;当步长设置较大时,达到最大功率点所耗费的时间较短,但达到最大功率点附近时的震荡幅度较大。因此,如何选择合适的步长,以获得最快的跟踪速度与较高的跟踪精度成了一个重要问题。为了解决这一问题产生了很多改进的方法,例如变步长变占空比扰动观察法、基于遗传算法和扰动观察法的MPPT 算法[3]等。在本文中,采用MATLAB/Simulink 分别对扰动观察法、变步长变占空比扰动观察法进行了建模仿真,并对实际仿真运行的运行结果进行了比较观察。结果表明,变步长变占空比扰动观察法较传统的固定步长扰动观察法在跟踪速度和跟踪精度方面都有了明显的改善提高。
1 光伏电池工作特性
光伏电池的输出功率随着太阳光照强度、温度和负载的变化而成非线性变换,外部条件固定时,在特定工作电压下,功率达到最大值时,这个功率最大值点即为最大功率点(Maximum Power Point,MPP)。光伏电池P-U 特性曲线如图1 所示。
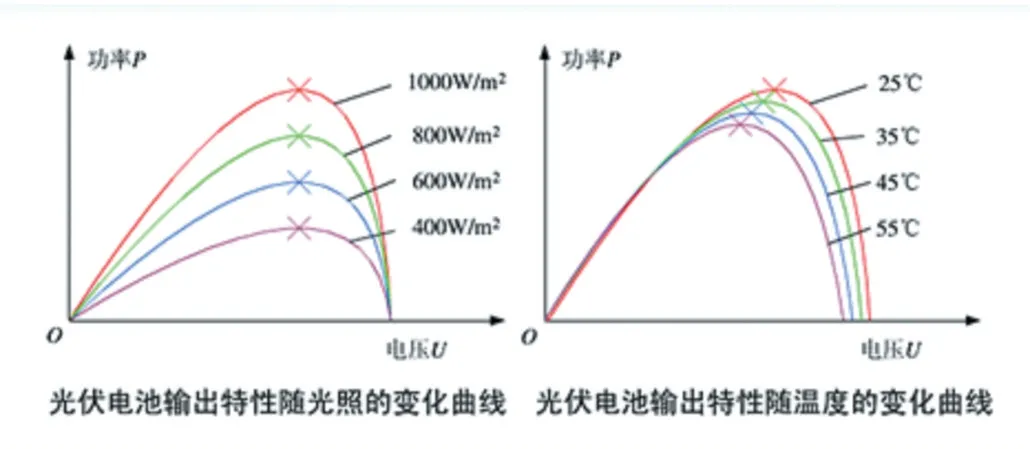
图1 光伏电池P-U特性曲线
在使用太阳能光伏发电的过程中,为了提高系统的工作效率,获得最优的性能,需要对功率进行不断寻优,以使光伏电池始终工作在最大功率点附近,这个寻优过程被称之为最大功率点跟踪(Maximum Power Point Tracking,MPPT)[4],目前,最大功率点跟踪技术已成为光伏发电系统中的研究热点。
2 工作原理及系统建模与仿真
传统的固定步长扰动观察法及改进的扰动观察法仿真模型包括:光伏电池(PV)模块[5],DC/DC 变换电路,扰动观察法(P&O)控制器模块,脉冲宽度调制(PWM)模块。
仿真参数设定如下:环境温度为25°C,太阳光照强度为从1000W/m2变化到800W/m2再变化到600W/m2。电容C1=0.001F,电容C2=0.002F,电感L=0.003H;PWM脉冲信号周期为0.001s,零阶保持器的采样周期为0.0001s,负载R=18Ω。
系统的工作流程为:首先,设定太阳光照强度和环境温度。为了更好地观察扰动观察法的跟踪效果,本文中将环境温度设为25°C,太阳光照强度设为从1000W/m2变化到800W/m2再变化到600W/m2。光伏电池模块输出电压U 和电流I,电压、电流经检测电路转化为扰动观察法控制器所需要的信号形式输入到扰动观察法控制器模块,经过扰动控制后再将输出的信号输入到脉冲宽度调制模块中去。通过脉冲宽度调制模块,改变输出波形的占空比。再将改变占空比之后的波形输入至DC/DC 变换电路,通过使用DC/DC 电路,将电压不稳定的直流电流变成我们所需要的电压稳定的直流电流。将电压值与电流值相乘,所得结果输入到示波器,通过示波器观察寻优的过程。通过扰动观察法控制器的不断扰动,调整电压或者占空比,最终找到最大功率点,完成最大功率点寻优的过程。
2.1 扰动观察法原理及仿真模型
扰动观察法的原理是对光伏电池输出的电压进行不断扰动调整,通过比较扰动前后功率值的大小,不断调整扰动方向,最终找到最大功率点。在最大功率点寻优过程中,若功率值较前一时刻增大,说明电压调整的方向正确,则继续按照原方向对电压进行扰动;若功率值较前一时刻减小,说明电压调整的方向错误,则改为采用与原方向相反的扰动。
扰动观察法的算法流程图如图2 所示。

图2 扰动观察法的算法流程图
基于扰动观察法控制算法的光伏发电系统MPPT仿真模型如图3 所示。
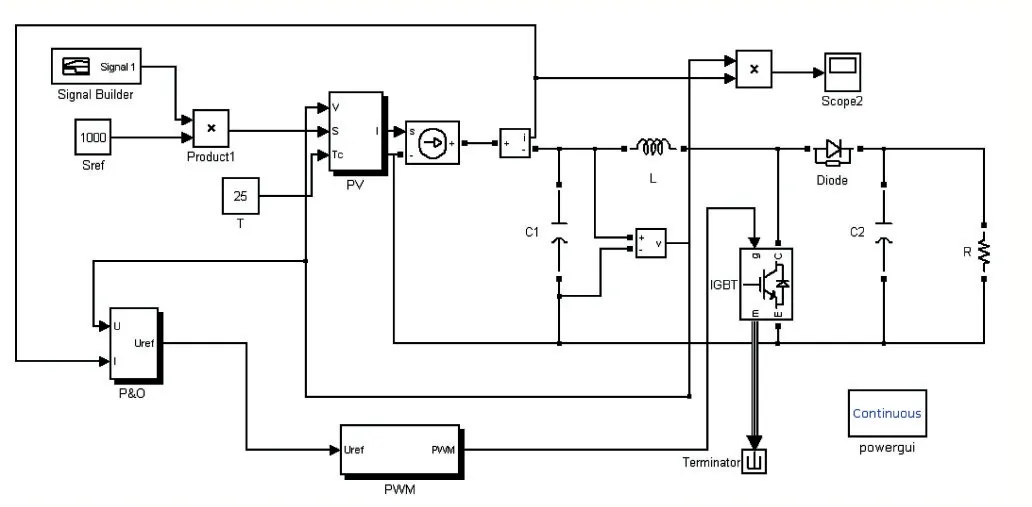
图3 基于扰动观察法控制算法的光伏发电系统MPPT 仿真模型
2.2 变步长变占空比扰动观察法原理及仿真模型
变步长变占空比扰动观察法的原理是每隔一定的时间对光伏电池的占空比进行变步长的扰动,使占空比增加或减少,与此同时,同时对输出功率进行观测,通过比较功率值的变化方向决定下一步的扰动方向,最终实现最大功率点寻优的目的。

图4 基于变步长变占空比扰动观察法控制算法的光伏发电系统MPPT仿真模型
变步长变占空比扰动观察法的仿真模型在基于扰动观察控制算法的光伏发电系统MPPT 仿真模型的基础上对P&O 模块与PWM 模块进行了改进,将固定步长固定占空比的扰动形式变为变步长变占空比的扰动形式[6-8]。
本文所采用的变步长变占空比扰动观察法的思路为将电压、电流相乘,获得功率P。通过P 的变化方向,来对占空比进行变步长扰动。若功率值较前一时刻增大,说明占空比调整的方向正确,则采用大步长来改动占空比,将步长值设置为0.01,占空比扰动方向不变;若功率值较前一时刻减小,说明占空比调整的方向错误,则改为采用小步长来改动占空比,将步长值设置为0.001,占空比扰动方向设置为与原扰动方向相反。其仿真模型如图4 所示。
2.4 仿真结果
传统的固定步长扰动观察法仿真结果如图5所示。
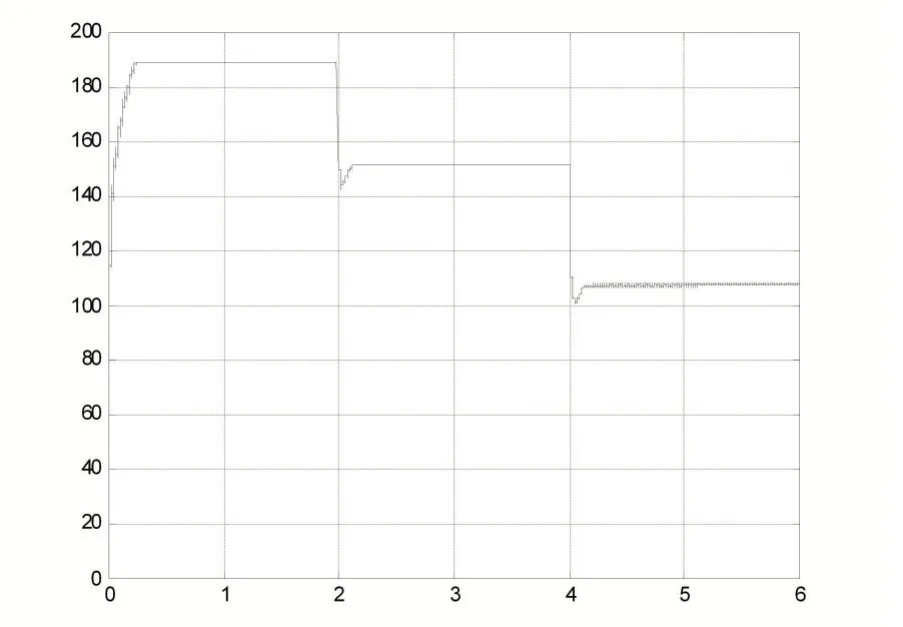
图5 基于扰动观察法控制算法的光伏发电系统MPPT仿真结果
如图5 所示,日照强度从1000W/m2变化到800W/m2再变化到600W/m2时,仿真分别于0.25 秒、2.12 秒、4.14 秒左右达到稳定,达到稳定时,该光照强度下的输出功率最大值分别为190W、151W、107W 左右。达到稳定后,曲线在一定的范围内来回震荡。
如图6 所示,日照强度从1000W/m2变化到800W/m2再变化到600W/m2时,仿真分别于0.02 秒、2.03 秒、4.06 秒左右达到稳定。系统稳定后保持在一个恒定的值上,无震荡,不会有多余的能量损失。

图6 基于变步长变占空比扰动观察法控制算法的光伏发电系统MPPT仿真模型
3 结语
本文对扰动观察法及变步长变占空比扰动观察法的跟踪原理进行了分析,并据此对两种方法建立MATLAB/Simulink 仿真模型进行仿真实验。通过仿真实验,获得了最大功率跟踪的寻优曲线,将获得的寻优曲线进行了对比,进一步说明变步长变占空比扰动观察法较之传统的固定步长扰动观察法更加具有优越性。
在环境温度为25°C,太阳光照强度从1000W/m2变化到800W/m2再变化到600W/m2时,采用固定步长扰动观察法在经过一段时间的寻优后能够达到最优值,并在最优值附近不断震荡,虽然震荡步长设置合理时,震荡的幅度不会很大,但也会产生一定的不必要的能量损失;采用变步长变占空比扰动观察法时,能够在很短时间内达到最优值,并且在达到最优值时稳定在一个固定的数值,不发生震荡,因此不会产生能量损失。仿真结果表明:采用变步长变占空比扰动观察法时系统的动态性能良好,能够很好地适应不断变化的外界环境,在太阳光照强度变化较大时,能够快速寻找到最大功率点,使系统工作在最大功率点处,具有很好的实用价值。
