计算机生成兵力的目标动力模型设计
2019-03-05沈凤
沈凤
(四川大学计算机学院,成都610065)
0 引言
计算机生成兵力(Computer Generated Force,CGF)是指用计算机模型来实现参与仿真的作战人员或武器系统等仿真对象,其目的在于减少真实作战人员和武器装备的参与,降低仿真训练的成本[1]。其中,实体模型包含实现兵力对象所需的各种子系统模型及参数,最主要的是兵力对象的动力学模型[2]。本文针对计算机生成兵力中的目标动力模型进行设计,主要描述飞机和导弹的动力模型,采用相对简化的模型,以减少动态模型所占用的计算时间[3]。
1 目标动力模型设计
1.1 飞机动力模型设计
飞机的运动模型主要包括:起飞、延航路飞等,其中最具有代表性的是延航路飞模型。延航路飞模型即飞机按照指定的航路点飞行,要求当飞机飞到指定航路点时也达到指定的速度和方向[4]。
飞机收到延航路飞的指令之后,先计算出相应的关键信息,再依据飞机机动库里面的机动函数实现飞机运动的生成,其主要流程如图1 所示。
设h0、P0点为飞机当前的方向和位置,h1、P1点为飞机目标的方向和位置。飞机从P0飞向P1,可以分为三个阶段:一次航向调整、直线飞行、二次航向调整,如图2 所示。

图1 航路飞行运动流程

图2 飞机可能飞行路线示意图
如图2 所示,飞机当前点和目标点各有两个圆可以调整方向,故从当前点到目标点有四种情况:①右右;②左右;③右左;④左左。在飞机转弯方向未定的情况下,选择最短的飞行路径。确定了飞机两次转弯方向的航路飞行路线的关键点如图3 所示。
图3 飞行航路关键信息
其中点P0、h0表示飞机的起始位置和起始方向,点P1、h1表示飞机的目标位置和目标方向,点O0、O1表示飞机第一、二次航向调整圆心,点A、B 表示直线飞行开始点和结束点,hab表示直线飞行的方向,a0、b0表示第一、二次旋转角度。
1.2 导弹动力模型
导弹飞行过程有发射段、转弯段、制导段和遭遇段四个阶段,根据导弹飞行各阶段分别建立运动模型。
(1)发射段
从导弹发射到导弹开始转弯这一阶段被称为导弹的发射段,该段的描述为:到达发射时延后,导弹从发射筒离开并按照某个倾角射出,如图4。
图4 导弹的发射示意图
图4 中,弹道倾角θ(导弹的速度矢量V 与水平面的夹角),水平向上为正,反之为负。弹道偏角φ(导弹的速度矢量V 在水平面的投影与地面坐标x 轴的夹角),逆时针为正,反之为负。
实验中不考虑导弹的气动力情况[5],故在导弹的发射段不考虑Fv(垂直升力)、Fh(水平面侧向力)、Fr(水平阻力),只考虑重力情况。其中:

导弹的运动学方程如下所示:
Vx,Vy,Vz分别为导弹速度矢量V 在坐标轴上的分量,x0,y0,z0为导弹发射点在地面坐标系的位置。在不考虑空气阻力等环境因素的情况下,导弹的发射过程可认为在重力作用下做曲线上抛运动。
(2)转弯段
从导弹转弯开始到转向完毕的阶段,称为导弹转弯段,其示意图如图5。

图5 导弹转弯示意图
将导弹转弯开始的速度矢量Vi和转弯结束的速度矢量Ve可分解为:

由此可得到,转弯段转动的空间夹角μ 在xy 平面的夹角为:

转弯段转动的空间夹角μ 在xz 平面的夹角为:

(3)制导段
导弹的制导段分为中制导段和末制导段。导弹转弯结束以后将导弹引至一定的距离范围,此阶段称为中制导段。目标进入一定距离范围,导弹进入末制导段[5]。当前最普遍使用的末制导引律是比例导引律[6]。下面是比例导引律方程:


图6 导弹比例导引律的示意图
如图6 所示,将导弹和目标的运动简化为质点的运动(将导弹与目标的运动限制在平面内)。图中ON表示基准参考线,目标在T 点,导弹在M 点;VM为导弹的速度,∅M为导弹航迹角,表示导弹速度与视线MT 的夹角,导弹速度向量前置角θM,表示导弹速度与基准线ON 的夹角;目标的速度为VT,目标航迹角∅T,表示目标速度与视线MT 的夹角,目标速度向量前置角θT,表示目标速度与基准线ON 的夹角;r 表示弹目距离,q 表示基准线夹角(基准线ON 与视线MT的夹角)。距离和角度变化律方程如下:

得到导弹的运动学方程组如下:
在有限时间内必须满足r →0,才能让导弹命中目标,故对导弹的运动施加不同的约束条件产生不同的引导方法。
(4)遭遇段
导弹的遭遇段是指导弹根据目标信息进行飞行,并与目标发生碰撞、爆炸并摧毁目标的阶段[5]。
2 设计实现
设计运动模型(CBaseDriver)基类,飞机运动模型(CPlaneDriver)、导弹(CMissileDriver)分别继承CBase-Driver,生成用于目标机动计算的运动学模型库,供目标机动计算使用。
CBaseDriver 类的DoUpdate()函数为目标机动计算主函数:首先,根据目标实体类型调用CMissileDriver类或CPlaneDriver 类的GetPerformance()函数获取要计算的目标实体的运动参数,调用GetObject()函数获取目标实体当前状态,包含位置、速度、损伤状态等,完成目标机动计算所需数据的准备工作;然后依次调用CBaseObj 类中的DoCMD()函数,顺序执行指令队列中的指令,根据指令类型,分别调用AdjustSpd()、Adjust-Alt()、FlyToPoint()、Hold()、Crash()、Attack()等函数模拟飞机和导弹的运动,计算目标在当前帧的位置信息和速度信息,采用SetObjPos()、SetObjPose()等函数设置目标当前状态;最后,将指令执行结果发送至CCMDManager 类。实现类图如图7。
3 结语
计算机生成兵力是分布式交互仿真的一个重要组成部分[7]。本文针对计算机生成兵力的目标动力模型进行了分析,其中重点对飞机的航路飞行模型和导弹的运动模型进行了介绍,并给出了目标设计的实现思路,模型采用模块化的设计方式,可重用性好,为计算机生成兵力系统的快速开发提供有效支撑。CGF 系统是未来作战仿真所必备的技术支持,发展前景广阔[8]。我们在开发过程中不仅要总结以前还要注意瞄准未来,未来的战术思想、战争模型等会有新的特点,只有抓住这些特点才能让我们的CGF 系统跟上世界潮流。
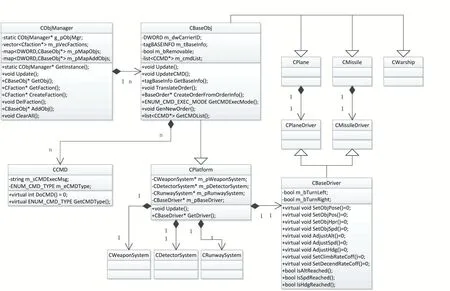
图7 目标计算设计实现类图
