考虑操纵稳定性的自动驾驶汽车轨迹综合优化方法
2019-02-18周厚刚
周厚刚
摘 要:近年来,自动驾驶汽车已经成为我国在可持续发展战略实施中的重要研究课题,由于在对自动驾驶汽车的轨迹进行局部规划时,会影响到汽车的整体操纵稳定性,进而降低自动驾驶汽车的安全性,为此,如何在确保自动驾驶汽车具备良好操纵稳定性的同时,对汽车轨迹进行合理的优化,也已成为自动驾驶汽车在研发中的技术难点。本文针对自动驾驶汽车的轨迹优化问题,在考虑其操纵稳定性的基础上,提出一种综合性较强的轨迹优化方法。
关键词:操纵稳定性;自动驾驶;汽车轨迹;优化方法
随着汽车产业的飞速发展,自动驾驶汽车已经成为汽车产业未来的发展方向。对于自动驾驶汽车而言,最重要的是提高其主动安全性,而这就需要探寻一种科学的汽车轨迹规划方法,但因轨迹规划会约束汽车的行驶位置状态,而且以往的规划方法并未对汽车在运动学及动力学方面的相关参数进行充分考虑,进而会在很大程度上影响到汽车的操纵稳定性,这无疑会在很大程度上威胁车内人员的生命安全。因此,积极探寻一种能够对轨迹曲率进行连续规划,并且能够保障自动驾驶汽车不会发生碰撞的参数化优化方法,对于提高自动驾驶汽车的安全性、改善城市交通压力、促进智慧城市发展具有重要的现实意义。
1 自动驾驶汽车在操纵稳定情况下的动力学方程
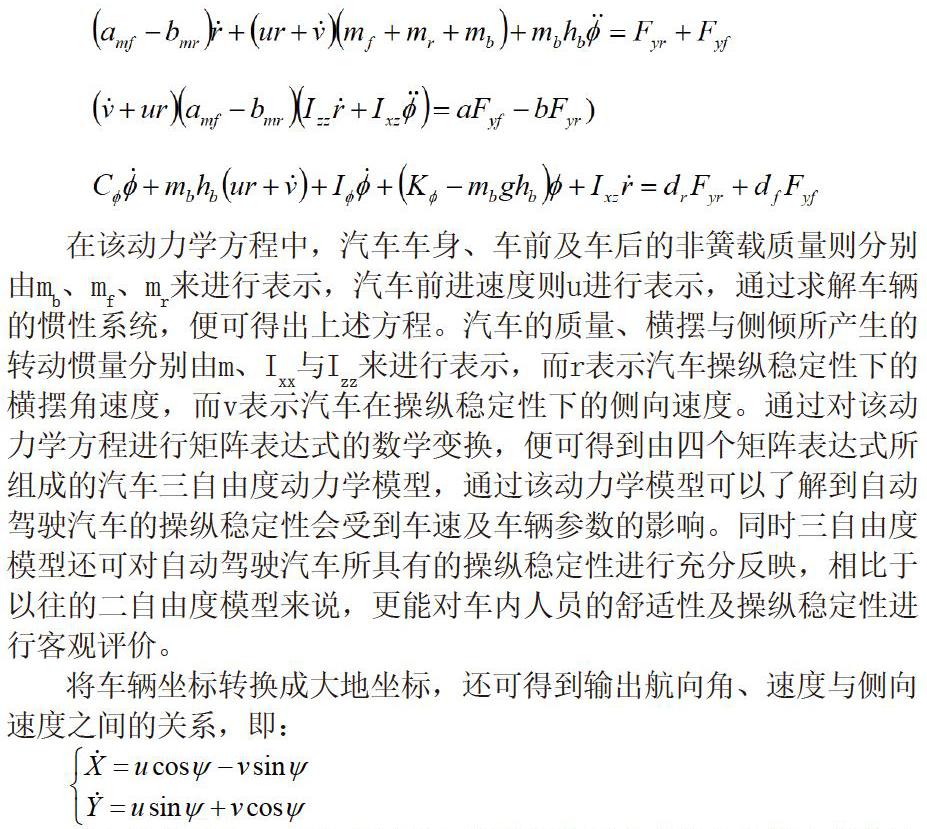
对于自动驾驶汽车来说,可通过两个坐标系来反映其位置关系,分别是大地坐标系与车辆坐标系,在构建汽车模型过程中,考虑到其操纵稳定性,还要在上述两个坐标系的基础上再增加一个坐标系,因此可分别用A(a1,a2,a3)、C(c1,c2,c3)与B(b1,b2,b3)来对这三个坐标系进行表示,车身在转动过程中,b3与c3会产生夹角,该夹角就是车身的侧倾角,可利用来表示该夹角。由此便可构建对应的动力学方程,以此反映出车身侧倾角、横摆角速度以及侧向速度之间的关系,即:
在该动力学方程中,汽车车身、车前及车后的非簧载质量则分别由mb、mf、mr来进行表示,汽车前进速度则u进行表示,通过求解车辆的惯性系统,便可得出上述方程。汽车的质量、横摆与侧倾所产生的转动惯量分别由m、Ixx与Izz来进行表示,而r表示汽车操纵稳定性下的横摆角速度,而v表示汽车在操纵稳定性下的侧向速度。通过对该动力学方程进行矩阵表达式的数学变换,便可得到由四个矩阵表达式所组成的汽车三自由度动力学模型,通过该动力學模型可以了解到自动驾驶汽车的操纵稳定性会受到车速及车辆参数的影响。同时三自由度模型还可对自动驾驶汽车所具有的操纵稳定性进行充分反映,相比于以往的二自由度模型来说,更能对车内人员的舒适性及操纵稳定性进行客观评价。
将车辆坐标转换成大地坐标,还可得到输出航向角、速度与侧向速度之间的关系,即:
在上述公式中,大地坐标系中自动驾驶汽车在纵向及横向驾驶过程中产生的距离分别是X与Y,也就是自动驾驶汽车在行驶过程中所形成的轨迹。
2 三自由度动力学模型与Carsim模型的参数响应对比
在上文中的三自由度模型可通过Simulink模块来进行构建,在构建过程中,需要将自动驾驶汽车的相关参数输入到系统的Carsim模型内,然后通过仿真技术来实现对Carsim模型以及三自由度模型的仿真分析,以此对操纵稳定性参数进行输出,确定其具体误差。当自动驾驶汽车以每小时36公里的速度行驶时,需要将换道车轮转角及恒定车轮转角作为模型的输出参数,由此便可得到其动力学响应,通过绘制自动驾驶汽车的车轮转角输入曲线、大地坐标系侧向速度响应输出曲线、横摆角响应输出曲线以及侧倾角响应输出曲线,可以了解到无论是Carsim模型,还是三自由度模型,其在横摆角响应以及侧向速度上的误差都很小,这也对三自由度模型的准确性进行了有效验证。通过分析这两个模型的侧倾角响应曲线以及横摆加速度响应输出误差来看,相比于Carsim模型来说,三自由度模型有着更快的输出响应速度,而且结果也比Carsim模型精确,由此也能对自动驾驶汽车的操纵稳定性进行反应。
3 考虑操纵稳定性的自动驾驶汽车轨迹的综合优化方法
1)目标函数。通过对自动驾驶汽车安全域中的若干换道轨迹进行生成,然后通过BP神经网络对自动驾驶汽车在换道过程中的前轮转角变化进行仿真,将前轮转角作为三自由度模型的输入项,能够对自动驾驶汽车在换道过程中的操纵稳定性及姿态参数进行输出。对自动驾驶汽车的轨迹好坏有许多评价方法,采用不同的换道评价方法,对汽车运行安全、动力学性能有着直接影响。自动行驶汽车在换道过程中的持续时间则能够对其行驶效率进行反映,汽车性能则会不同程度的受到来自于汽车横向与纵向加速度的影响。因汽车在换道时并不会发生较明显的速度变化,因此在对汽车的轨迹进行优化时,可将横向加速度与换道持续时间作为轨迹优化的目标函数。考虑到横向加速度是汽车在换道时的极值,其无法对换道中汽车的变化情况进行反应,因此这种轨迹优化方法主要是构建二自由度车辆模型时所使用的,难以评价其操纵稳定性。因此需要改造优化评价函数。由此便分别取横向加速度、横摆角加速度以及侧倾角加速度在变化时的平均值,从而使汽车运行效率得到充分考虑的同时,也能对汽车的舒适性及操纵稳定性进行客观评价。
2)约束条件。汽车在换道行驶时,会和前方的障碍物产生一定的距离,而该距离必须要大于安全距离,因此需要设置安全距离来对其进行约束。除此之外,汽车从当前车道向目标车道进行变换时,还需要约束其横向偏移距离,这样才能防止其因横向偏移距离过远而与其他车辆或障碍物发生碰撞。最后,汽车换道时,其安全性及舒适性是由操纵稳定性参数所影响的,如果产生过大的侧倾角以及横向加速度,势必会导致汽车发生侧翻或甩尾,为此需要设置一个加速度约束。
3)求解目标函数。设定车辆的每秒换道速度分别为10米、12米和15米,然后对其轨迹优化的目标函数进行求解,能够获得权重比不同时汽车轨迹安全域最优换道轨迹中的最佳换道时间与横向加速度。权重比的不同分配,会对汽车换道过程中的换道最佳时间与横向加速度产生影响。若评价函数的值为最小,则其换道轨迹便是汽车安全域内的最优换道轨迹,依据权重比不同时所获得的换道最优时间,然后利用神经网络来对正弦车轮转角在变化过程中的内在规律进行识别,能够对不同换道轨迹进行输出。这样依据自动驾驶汽车的动力学模型即可实现对操纵稳定性参数的输出,通过分析该参数能够掌握汽车在换道时的时间效率及其运行性能。在汽车的车速相同时,权重比越大,则汽车的行驶效率也就越高,相应的其换道轨迹陡峭程度也就越高,在换道中所消耗的时间也就越少。相比于常规的轨迹优化方法来说,轨迹综合优化方法在汽车的综合加速度变化率及换道时间上有着更加平缓的曲线变化,其换道最佳时间有所增加,进而使汽车性能更侧重于操纵稳定性与舒适性,进而使汽车的换道粗暴行为得到了有效避免。
4 结语
总而言之,针对无人驾驶汽车的轨迹优化问题,为了考虑汽车的操纵稳定性,本文在以往常规的轨迹优化方法上,提出了一种综合轨迹优化方法,从而在一定程度上增加了汽车的最佳换道时间,使无人驾驶汽车能够避免出现换道粗暴行为,有效提高了无人驾驶的操纵稳定性与安全性。
参考文献
[1]朱林峰,杨家富,施杨洋,方朋朋.无人驾驶车辆横向控制策略研究进展[J].世界科技研究与发展,2018,40(05):506-518.
[2]徐杨,陆丽萍,褚端峰,黄子超.无人车辆轨迹规划与跟踪控制的统一建模方法[J].自动化学报,2019,45(04):799-807.
[3]邵毅明,陈亚伟,束海波.自动驾驶汽车的轨迹跟踪控制[J].重庆交通大学学报(自然科学版),2019,38(08):1-6.
[4]贾伟伟,陈开超,袁智明.某皮卡操纵稳定性改进[J].汽车实用技术,2018(15):83-85.