基于深度学习法的无人驾驶车中自动变速器换挡模型
2019-01-30于文涛李海斌刘阳
于文涛 李海斌 刘阳
(1.天津职业大学,天津300410;2.天津云联科技有限公司,天津300300)
一、前言
随着我国城市化规模的不断扩展,提高城市交通运载效率,减少交通拥堵,降低交通能耗,并尽可能地优化和节约城市资源,成为交通规划者急需解决的课题。互联网技术的高速发展产生的无人驾驶技术是解决上述问题的方法之一。无人驾驶汽车产业因具有出行安全、节约时间、自动规划行驶路线的特点而成为未来交通发展的主要产业之一。孙皓天从理论上阐述深度学习在无人驾驶技术应用的可能性。陈淑君利用汽车的前视图像,提出了基于深度学习的汽车型号识别方法,该方法使汽车型号识别率显著高于传统机器学习方法。张军提出了对智能型无人驾驶汽车的发动机故障检测方法的改进,提高了对发动机故障的诊断能力。赵卓等人成功自主研发了用于全自动无人驾驶列车的转向架,并将该研究成果应用于实际工程项目,获得了良好的效果。自动变速器会伴随着路面工况的不断变化而进行即时切断从而发生换挡。自动变速器的换挡技术是无人驾驶车中的关键技术。传统车辆中的自动变速器主要通过人工手动进行控制,尚未与人工智能化方法结合。本文基于深度学习理论,采用CNN的方法建立了无人驾驶车辆中自动变速器换挡模型,实现了无人车根据路况条件而自动实现变速换挡过程中的脚踏油门开度、档位、车速及发动机转速之间的控制,为实现无人驾驶技术,实现无人驾驶车辆的安全提供了理论指导和实践经验借鉴。
二、理论
1.传动系统
图1为一个汽车典型汽车传动系统工作示意图。依据外部环境(人流、路况和信号灯等)和自身车况条件(油门开度、档位、发动机功率),驾驶员通过脚踏油门程度、变换档位和脚踏制动踏板(刹车)的方式依次直接或者间接地将调整或者控制液力变矩器和齿轮变速器结构实现对汽车动力系统的控制,即实现了控制汽车速度。在这个过程中,变速器结构通过换挡调节传动系统输出力矩,而变速器的传动比为下一时刻车辆变速器的需要输出力矩的放大或缩小倍数,但在车辆连续换挡的过程中,变速器本身输出的力矩已得到了放大或者缩小,所以其输出的力矩大小为车辆在该档位下的传动比。
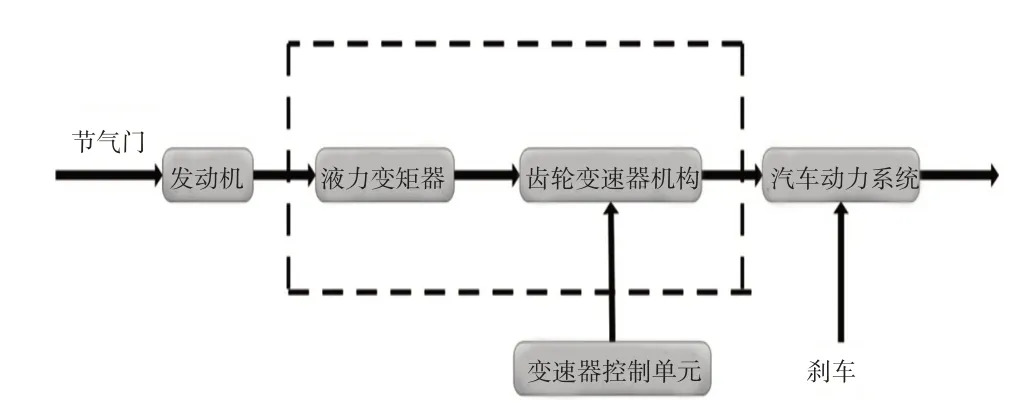
图1 汽车传动系统工作示意图
2.CNN算法
深度学习(Deep Learning,简称DL)理论起源于人工神经网络(ANN)的研究。深度学习通过组合(提取)低维度事物特征形成更加抽象的高维度事物属性类别或特征,以期望实现数据的分布式特征表示。深度学习结构主要指在网络中包含多隐层的多层感知器。卷积神经网络是深度学习中的一种算法,该算法结构由一种多层神经网络组成,擅长处理图像特别是大图像的相关机器学习问题。深度学习网络含有多个隐含层的多层感知构建了一种深度学习结构,图2为含有两个隐含层的神经网络,层与层之间是全连接,每层的节点之间是无连接,上一层的每个节点都同下一层的每个节点相连接,每条连接线都代表一个不同的权重。
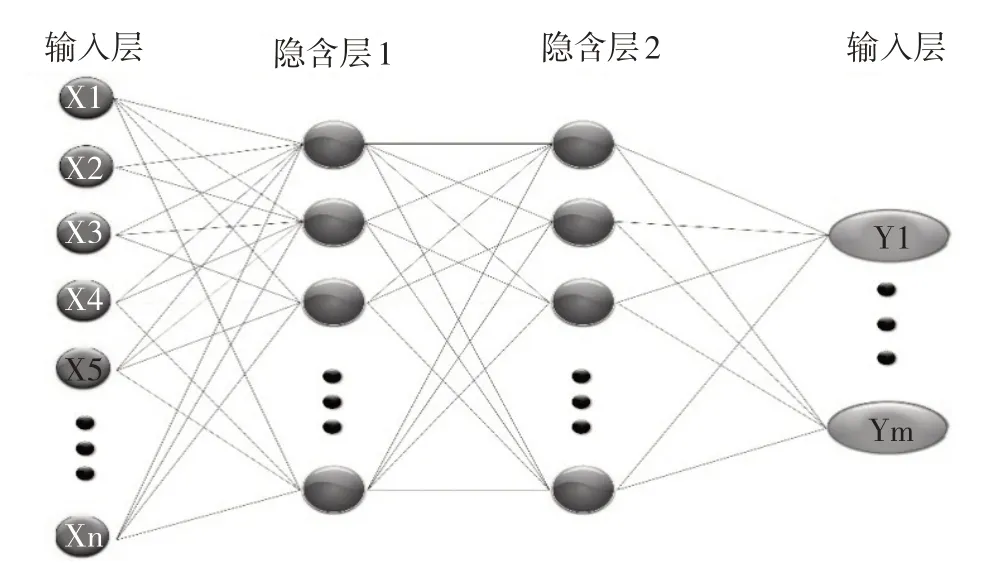
图2 含有两个隐含层的深度学习网络结构图
3.模型构建
深度学习在无人驾驶车辆的变速器换挡模型构建的流程图步骤如下:
步骤1:将无人驾驶汽车的档位、换挡时间、发动机转速设为输入层,将油门开度和汽车速度设置为输出层,利用PSO-Simulink理论建立汽车档位、换挡时间、发动机转速与油门开度和汽车速度的无人车换挡优化模型;
步骤2:视屏摄像头每隔1s拍摄车前信号标志、行人、自行车、障碍物等车辆行驶过程中随机出现的移动性障碍:
步骤3:利用雷达监测无人车与移动障碍之间的距离;
步骤4:将障碍物的信息与距离传递至车载电脑资料库中,对数据进行预处理;
步骤5:选择处理后的数据存储至深度学习和测试单元组中,对网络第一层进行无监督学习;
步骤6:通过深度学习第一层的运算实现数据的聚类,将相近数据划分为同一类,随机进行判定;
步骤7:利用监督学习的方法对调整网络第二层各节点的阈值,提高第二层数据输入的精确度;
步骤8:依据数据的结果对深度学习中的网络结构进行不断调整,若结果满足要求,则网络计算停止;若网络输出结果不满足要求则返回至步骤5;
步骤9:将网络的输出结果反馈至无人车的操作系统中;
步骤10:无人车操作系统根据反馈信息,及时调整无人车的油门及车速,避让障碍物。
三、实验部分
选取某车型进行换挡实验,换挡过程按照1→2挡,2→3挡,3→4挡,以及4→3挡,3→2挡,2→1挡,在这个过程中测试节气门分别显示参数为0,5,25,35,40,50,90,100%时的车速。测试车速为分别为750~4000mph时的测试液力变矩器数值。分别利用PSO-Simulink算法与单纯的Simulink算法计算档位、换挡时间、发动机转速与油门开度和车速之间的关系。
收集道路上的行人、汽车、摩托车及禁行标志4中类型的障碍物信息和距离。每个障碍物收集500张照片(其中无人车头正对面每种照片为100张,而平面内切斜角或者非平面内倾斜角小于30°的照片400张),分别采用深度学习中的CNN算法和机器学习中的BP、PNN算法对图像进行处理和判定。将判定结果与自动变速器模型相结合,输出最佳油门开度与车速。
四、结果与分析
1.变速器模型
基于PSO-Simulink算法与单纯的Simulink算法分别建立无人车的换挡操作模型,模型的输入层为换挡过程过程中的档位、换挡时间和发动机转速,输出层为油门开度和汽车速度。表1为基于PSO-Simulink算法与Simulink算法的结果对比表。从表1中可见,模型采用PSO-Simulink算法时,运算耗时0.41s,迭代步数为499,而采用单纯Simulink算法时,运算耗时0.62s,迭代步数为763。图3为基于PSO-Simulink算法的汽车换挡操作模型运算过程中的PSO模拟优化结果适应度函数值时的迭代图。从图3可见,模型在迭代19步骤时,适应度函数Fitness值为0.1,随着迭代步骤的增加,适应度Fitness函数值趋近于0,在迭代步数为499时停止了运算。

表1 变速器模型中算法结果对比表
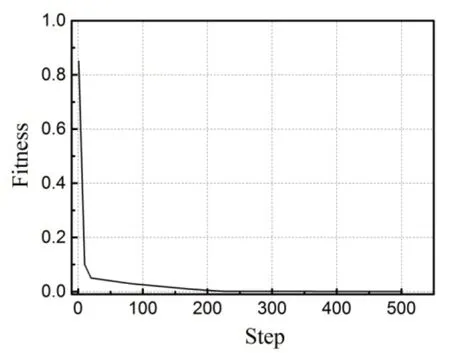
图3 PSO模拟最优结果适应度函数值
2.自动变速器换挡模型
目前,基于对路面情况的识别方法有采用深度学习中的CNN算法、机器学习中的BP和PNN算法,各算法已经广泛应用于无人车路面判别系统。基于深度算法中CNN算法与机器学习中BP和PNN算法分别对无人车行驶过程中的路况障碍进行分析,并将分析结果反馈至汽车操作系统中,操作系统的油门开度及车速结果与实测结果对比,如表2所示。从表2中可见,采用深度学习中CNN算法具有匀速耗时少,迭代步数低,判定准确率高的特点。该模型可根据路面障碍物信息和距离,为无人汽车自动换挡技术提供了一种新技术。
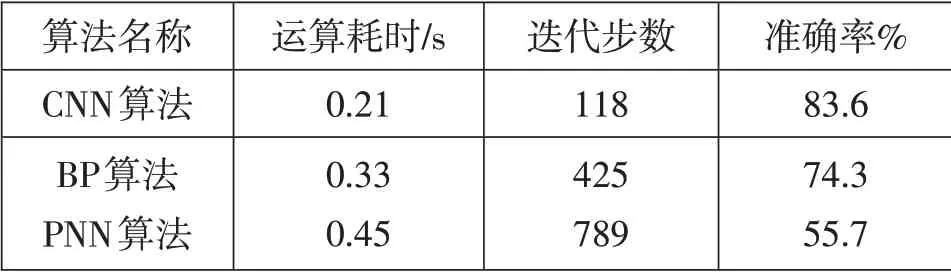
表2 变速器模型中算法结果对比表
3.模型误差分析
图4为自动换挡模型3D效果关系图。从图4(a)可见,随着车速的增加,所需的油门开度略有增加,随着发动机转速的增加,对应的油门开度逐渐增加;从图4(b)和4(c)可见,在升档和降档过程中,随着油门开度的增加,车速逐渐增加,但升档过程中,同档位下车速增加较快。这些自动换挡模型之间的差异可能是影响表2中模型准确率的一个原因。
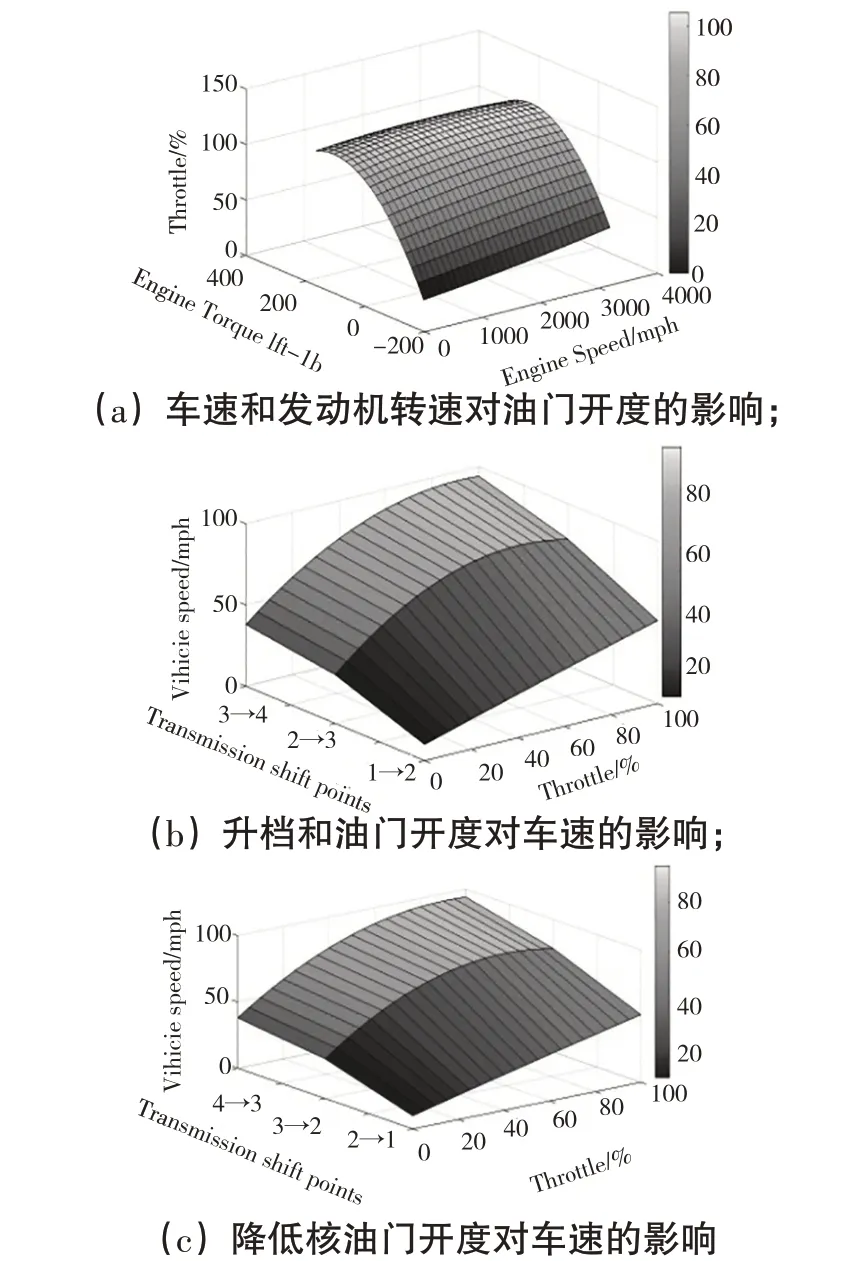
图4 发动机换挡模型关系图
图5为基于深度学习中CNN算法中路况障碍物样本采集图。从图5(a)为路,车辆样本为正常态,模型采集较为准确。伴随着路况中出现车辆闪灯样本(如图5(b)),模型采集过程中会出现车辆和车灯分别为两个样本的现象,此外,当路况中出现行人和车辆同时出现时,(如图5(c))时,模型会将行人和车辆归为一个障碍物。这些数据采集过程中的误差可能是影响表2中模型准确率的一个原因。
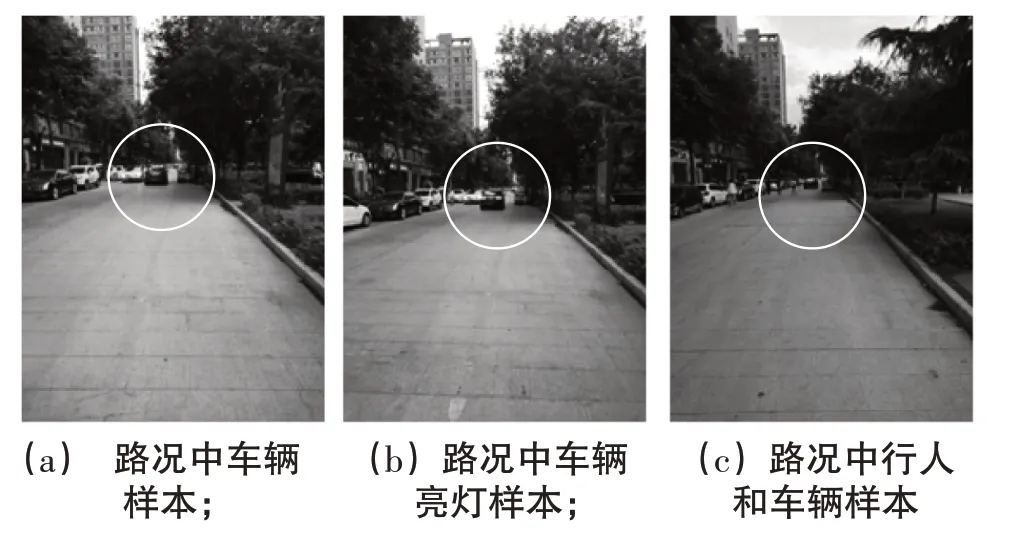
图5 路况障碍物样本采集图
五、结论
1.本文基于深度学习法建立了无人驾驶车中自动变速器换挡模型,该模型由两部分组成,第一部分基于PSO-Simulink算法建立了汽车自动变速器换挡模型,模型的输入层为换挡过程过程中的档位、换挡时间和发动机转速,输出层为油门开度和汽车速度。第二部分采用深度学习中CNN算法建立了无人车行驶过程中的路况障碍分析模型。
2.基于深度学习法建立了无人驾驶车中自动变速器换挡模型具有匀速耗时少,迭代步数低,判定准确率高的特点。该模型可根据路面障碍物信息和距离,为无人汽车自动换挡技术提供了一种新技术。
3.这些自动换挡模型之间的差异和路况障碍物样本采集图的采集误差是影响模型准确率的主要原因。
