低速域水下遥控机器人水动力试验系统设计
2019-01-25陈英龙张增猛侯交义弓永军
陈英龙, 宋 男, 张增猛, 侯交义, 弓永军
(大连海事大学船舶与海洋工程学院, 辽宁大连 116026)
引言
水下遥控机器人水动力特性是水下遥控机器人设计和运动控制的基础。水下遥控机器人在低速域运动具有低阻尼、水动力变化大的特点,低速域水动力特性的研究难度大,需要通过试验获取各项水动力系数,因此水动力试验系统成为该领域研究的重要基础。国内外有多个水下机器人实验室进行水下遥控机器人的相关实验。上海交通大学的多功能拖曳水池整体尺寸 300 m×16 m×7.5 m,该水池可以开展螺旋桨性能试验、耐波性能试验、以及特种航行器的自航与控制试验[1]。同时上海交通大学还拥有可以测量潜艇、深潜器、水下拖体、导弹等水下运动体的水动力性能的垂直平面运动机构[2]。中国船舶重工集团公司第七〇二研究所拥有的操纵性旋臂水池可进行船舶、 潜水器等的操纵性理论及试验测试,预报各型水中运动体的操纵性能[3]。哈尔滨工程大学智能水下机器人国家重点实验室可进行包括航速、推力、定位等水下遥控机器人相关性能实验[4]。浙江大学海洋装备试验技术实验室拥有20 m×5 m×4.5 m的水下机器人实验水池,在水池附近布置相关测速、测力、测功率、机械臂性能测试的相应传感器及装置,对水下机器人进行性能测试。但国内大多相关机构还是以测试船舶相关性能为主,很少或未开展水下遥控机器人性能的研究,而已经开展水下遥控机器人实验的机构,也有很多是由船舶实验系统改造而来,设备较为大型,实验代价高昂[5]。国外有一些小型的专门用于进行水下遥控机器人性能实验的系统。伍兹霍尔海洋研究所海洋应用物理与工程研究室在海洋中进行水下遥控机器人相关性能实验。实验项目包括整机性能、进器性能、机械手作业能力、动力定位能力等[6]。英国的Saab Seaeye公司在法汉姆的室内实验水池可以进行水下遥控机器人多项关键性能的实验[7]。国内外并没有专门为测量水下遥控机器人在低速域运动时产生水动力而设计的试验系统。本研究根据水动力仿真试验得到的数据,设计了一套可以用于测量低速域下水下遥控机器人水动力的试验系统。
1 水动力仿真模型
建立水下遥控机器人模型如图1所示。水下遥控机器人整体长1.1 m、宽1 m、高0.8 m。确定坐标原点O为水下机器人设计原点,建立载体坐标系(O-xyz)。计算域网格在ICEM中生成,计算区域如图2所示。定义面ABCD距离水下遥控机器人中心2 m,面EFGH距离水下遥控机器人中心6 m,大于5倍的水下机器人长度[8],使湍流充分发展[9]。网格类型为非结构化网格,在水下遥控机器人模型近壁面设置边界层,边界层高度2 mm,壁面y+值在10~80范围内,相邻边界层高度比为1.1,边界层共设置6层,对水下遥控机器人附近网格进行加密,使网格尺寸由内而外逐渐过度。适当的减小远离水下遥控机器人的网格密度,以控制流场内总网格数量[10]。网格总数442万,计算域网格局部视图如图3所示。使用Fluent软件进行流场仿真计算。设置面ABCD为速度入口,面EFGH为自由流出,其余面以及水下遥控机器人模型均为无滑移、无渗透、固体、绝热边界[8]。使用Realizablek-e湍流模型,这种带有湍流修正的k-e模型对于流动分离和复杂二次流有很好的作用[11]。在计算方法上,选用SIMPIE算法解算压力速度耦合方程。

图1 水下遥控机器人模型
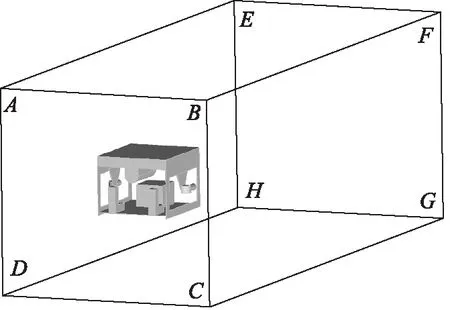
图2 计算区域
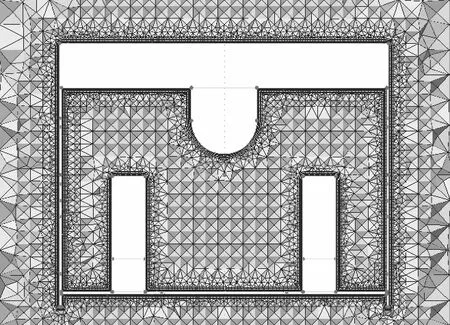
图3 计算域网格局部视图
2 水动力仿真分析
在笛卡尔坐标系中,力和力矩可以各自分解为3个分量,因此低速域水下机器人水动力试验系统需要测量水下机器人模型在低速域进行运动时3个方向上的分力与3个方向上的分力矩。
在设计试验台之前,首先进行水动力仿真试验,试验测得试验台不会受到壁面效应影响的合适距壁面距离以及在最大速度与角速度下水下机器人受到的水阻力与阻力矩。
2.1 水动力仿真分析壁面距离
在试验水池进行无界流场模型试验时,水池池壁会对运动中的水下遥控机器人产生干扰,所以在设计试验系统前,首先确定合适的水下遥控机器人与壁面的距离。令水下机器人模型与面ABFE、面BCGF、面DCGH、面ADHE的距离为0.8, 0.9, 1.0, 1.2, 1.5, 2.0, 3.0, 4.0 m,其他条件不变,共进行8组仿真试验,测定在沿x轴方向流速为1.0 m/s的水流中,不同的壁面距离下水下遥控机器人模型受到的水阻力,壁面距离d与沿水流方向受力F大小示意图如图4所示。
在无限大的流畅中不存在壁面效应,即壁面距离越远,壁面效应越小,仿真结果越接近真实的水阻力。从图4的数据中可以看到,当壁面距离大于2.0 m后,沿水流方向的受力基本保持在234.0 N,可以认为水下遥控机器人模型在离壁面2.0 m以上的距离运动时,壁面效应基本不会影响到水下遥控机器人模型。所以在设计水下机器人试验系统时,水下机器人距离壁面的距离最少应为2.0 m。
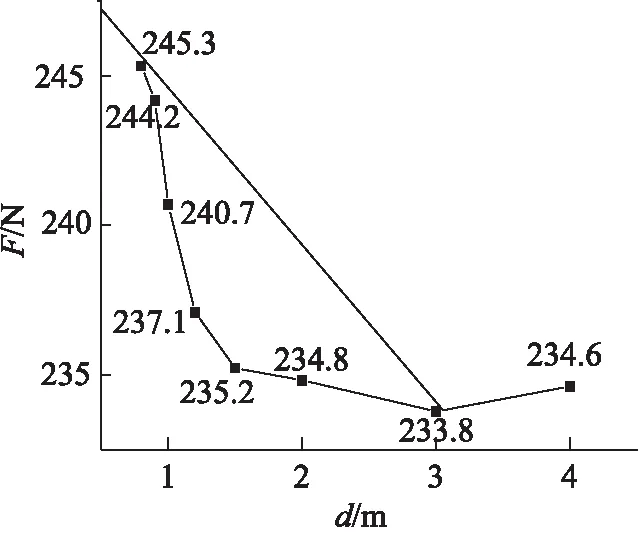
图4 壁面距离与沿水流方向受力统计图
2.2 水动力仿真分析水阻力
确定在试验中模型与壁面的距离为2.0 m后,还需要通过仿真得到水下遥控机器人模型在6个方向上分别以1.0 m/s的最大设计速度运动时所受到的水阻力,确定试验系统中所选用的力传感器的量程,以及根据测得数据对试验系统结构强度进行校核。水下遥控机器人在水中以1.0 m/s的最大设计速度进行直线运动可以相对为水流以1.0 m/s的速度冲击固定状态的水下遥控机器人模型。水流沿x轴反向流动时水下机器人模型周围速度矢量图如图5所示。不同方向上的水流对水下遥控机器人模型产生的沿水流方向上的力如表1所示。

表1 水流流向与沿水流方向受力统计表
通过仿真结果可以得到当水下遥控机器人模型在不同方向以1.0 m/s的最大设计速度进行直线运动时,最大会受到979.3 N的水阻力。在未来水下遥控机器人模型会更加复杂,框架内填充的设备模型会更多,所以在未来水下机器人受到的水阻力会比仿真结果更大,这就要求水下遥控机器人水动力试验系统的最大拖曳力设计指标应大于979.3 N,所以在这里将最大水阻力翻倍并取整,水下遥控机器人水动力试验系统的最大拖曳力设计指标定为2000 N。这要求水下遥控机器人水动力试验系统最大需提供2000 N的拖曳力,其结构也需要可以承受2000 N的外力,力传感器量程应大于2000 N。

图5 水流沿x轴反向流动时水下机器人模型周围速度矢量图
2.3 水动力仿真分析水阻力矩
通过仿真水下遥控机器人模型以30(°)/s的最大设计角速度绕模型中心旋转时所受到的力矩,确定所选择力矩传感器的最大量程,并对根据数据对试验系统进行强度校核。因为整个水下遥控机器人模型可以近似的看成一个边长1 m的正方体,所以当正方体以30(°)/s的角速度运动时,边缘的最大线速度为0.2618 m/s,而旋转中心的速度为0。因为需要通过仿真得到最大水下遥控机器人旋转时的最大力矩,而实际的水阻力距小于水下机器人模型受到0.2618 m/s的匀速水流冲击时产生的总阻力乘以最大作用力臂的水阻力矩,所以可以用这种方法在量级上分析水下遥控机器人受到的水阻力距。水下遥控机器人形状复杂,所以需要测量水下遥控机器人以不同的角度下受到水流冲击产生的阻力。水下遥控机器人本身最大作用力臂为1 m。在不同角度下水下遥控机器人模型在量级上受到最大力矩如表2所示。
通过仿真结果可以得知在水下遥控机器人以最大设计角速度30(°)/s进行回转运动时,在量级上受到的最大水阻力矩为67.7 N·m,方向为绕y轴与绕z轴。这里同样将水下遥控机器人最大水阻力矩翻倍并取整,水下遥控机器人最大旋转力矩设计指标定为200 N·m。在设计低速域水下遥控机器人水动力试验系统时,系统需要可以提供的最大力矩应200 N·m,其结构也需要可以承受200 N·m的力矩,力矩传感器的量程大于200 N·m。

表2 在不同角度下水下遥控机器人模型在量级上受到最大力矩
3 系统方案设计
整个低速域水下遥控机器人试验系统分为2个试验台,分别为进行长距离拖曳试验的拖曳试验台以及进行定点回转运动试验的旋转试验台。
拖曳试验台可以实现水下遥控机器人模型在水下进行低速域的匀速运动或匀加速运动,测量水下遥控机器人在水下的位移与受到的水阻力。拖曳试验台结构示意图如图6所示。拖曳试验台整体通过框架结构悬挂于试验水池池壁,支撑结构固定连接框架结构与直线导轨,使导轨受力均匀传递到框架结构上,结构最大受到4000 N·m的旋转力矩。滑块在直线导轨上进行直线运动,导轨和滑块采用JSA-LZG45CZ型滚珠直线导轨副,额定静力距5560 N·m,满足设计需求。滑块上方固定连接悬臂以保证水下遥控机器人在距离壁面2 m的距离上进行直线运动。悬臂的另一端通过连接杆和力传感器与水下遥控机器人模型连接,力传感器测量水下遥控机器人在水下运动过程中受到的水阻力,传感器量程大于2000 N,传感器精度0.5级。卷扬机拖动滑块在直线导轨上进行匀速运动或匀加速运动,最大设计速度1 m/s,最大拖曳力2000 N,调整水下遥控机器人模型的安装方向来测量模型在不同角度上进行直线运动时受到的阻力。拉线位移传感器测量水下遥控机器人在水下的位移,根据测得的位移计算出水下遥控机器人模型实时速度,以及在合适的距离使卷扬机停止工作,使整个滑动机构进行减速。由聚氨酯制成的缓冲装置缓冲滑块及其固定连接结构对试验台产生的撞击。

1.框架结构 2.直线导轨 3.支撑结构 4.滑块 5.缓冲装置 6.卷扬机 7.拉线位移传感器 8.悬臂 9.连接杆 10.水下遥控机器人模型 11.力传感器
旋转试验台可以使水下遥控机器人模型在水下进行低速域的回转运动,并测量在回转过程中水下遥控机器人模型受到的水阻力矩。旋转试验台结构示意图如图7所示。回转驱动选用SDL7型回转驱动,最大输出转矩14.6 kN·m。回转驱动与支撑杆固定连接,支撑杆使水下遥控机器人模型与池底距离2 m,连接杆的上方通过力矩传感器与水下遥控机器人模型1相连,力矩传感器测量在进行回转运动时水下遥控机器人模型受到的水阻力矩,传感器量程大于200 N·m,传感器精度0.5级。水下伺服电机通过驱动回转驱动使水下遥控机器人模型进行回转运动,水下伺服电机选用HKS100型深水专用电机,额定电压48 V,额定功率200 W,转速900 r/min,配1∶150减速机,减速机后电机扭矩260 N·m。通过调节模型的安装方向测量在不同方向上水下遥控机器人在进行回转运动时受到的水阻力。回转驱动下方通过连接杆与配重块相连,配重块平衡在进行回转运动时产生的反作用力矩,使试验台保持稳定。连接杆的长度为2 m,令配重块与地面的摩擦系数为0.1,单个配重块重25 kg。

1.水下遥控机器人模型 2.力矩传感器 3.支撑杆 4.回转驱动 5.伺服电机 6.连接杆 7.配重块
3 结论
本研究根据仿真实验数据设计了低速域水下遥控机器人水动力试验系统,为以后进行低速域水下机器人水动力试验打下了基础,更好的研究低速域下水下遥控机器人水动力系数。在整套水动力试验系统加工完成后会进行水下遥控机器人模型水动力的实际试验,实际试验结果会与仿真结果进行对比,分析误差产生的原因,进一步改进低速域水下遥控机器人水动力试验系统。
