支持力反馈的个性化膝关节置换虚拟手术仿真系统的研究与构建
2019-01-21王春娟张维杰马建兵姚舒馨程咏华徐显辉张明娇
王春娟 刘 非 张维杰 马建兵 姚舒馨 肖 琳 程咏华 徐显辉 连 芩 王 琦 张明娇
1(西安交通大学苏州研究院,江苏 苏州 215021)2(上海昕健医疗技术有限公司,上海 201203)3(西安交通大学附属红会医院关节外科膝关节病区,西安 710054)4(苏州昕健医疗技术有限公司,江苏 苏州 215021)5(西安交通大学机械制造系统工程国家重点实验室,西安 710049)
引言
全球膝关节置换术(total knee arthroplasty, TKA)的需求呈井喷式增长。据Kurtz等对欧美17个国家的统计显示,每年大约有110万人实施全膝关节置换术,并且手术案例数以11%的速度逐年递增[1]。以医疗卫生事业发达的美国为例,每年大约行50万例手术,预计到2030年将增长673%[2]。中国尚未有明确的统计结果报道,行业估计每年的关节置换病例数量在20万左右[3]。然而现阶段经验丰富的手术医师相对较少,并且与“十三五”计划提出“到2020年规范化培训50万名医师”的宏大发展目标有一定距离。
传统的“学徒制,一带多”的关节外科医师培养模式无法满足大规模的培训需求,因为主要的手术训练方式以尸体标本、活体动物、人造模型或者实际病人为操作对象。尽管尸体标本是最理想的训练工具,但因其资源匮乏且价格极其昂贵,用到的实际训练甚少;与人类组织结构较接近的活体动物不失为一种有效的替代品,但常受到社会的伦理谴责;而另一种人造假体训练模型大幅度降低生化物理的真实性,并且因不能重复使用导致资源极度浪费。
虚拟手术仿真系统为解决上述问题提供一种思路,尽管Stava早在1996年就已经提出三代医学仿真系统框架[4],但是研究机构和市场都集中于腹部软组织的切割变形仿真[5-7],以及微创术式的关节镜手术仿真[8-9],例如LapSim、ArthroS等;而对于开放式骨硬组织手术的仿真仍处于初级研究阶段,常涉及组织建模、碰撞检测和力反馈模型等3个关键技术。目前,组织建模主要包括骨组织的几何建模和物理建模,流行的几何建模方法有:基于医学影像的三维重建[10]、通过三维扫描设备逆向重建[11]或根据外轮廓手工创建[12],这些建模方式都只包含组织的表面信息,王党校等提出面向牙齿的体素模型建立方法表示内部属性[11,13],Morris 等采用表面模型和内部体模型混合的方式建立组织模型[14-15];碰撞检测对器械与组织的空间位置关系作出判断和响应,层次包围盒法因构造简单、相交复杂性低等优点被广泛应用[16-17],林艳萍等[10,18-19]采用在刀刃方向均匀布置多个碰撞检测点,建立AABB层次包围盒树模型,避免了器械穿透骨组织;早期经典手术仿真系统应用的力触觉模型多为基于惩罚或约束的力触觉渲染模型;现阶段基于金属磨削理论的力反馈模型研究较多,Arbabtafti等提出基于能量的概念,认为每切削单位骨组织消耗定量的能量,以此计算骨骼磨削的反馈力[20-21];Chan等根据正交切削和磨粒磨损的机械原理建立颞骨手术的力反馈模型[22];蔡明达等利用多个样点精确建立了手术器械触觉模型,模拟锯齿切削骨组织的过程[23]。
从仿真系统的整体角度来看,关于膝关节置换手术仿真系统的研究寥寥无几,文献记载仅Pinto等对此方面有研究,但未能实现钻孔、截骨等具体化手术操作,也不具备真实的虚拟手术器械和假体模型[24]。本研究以个性化膝关节置换手术为研究对象,采用几何模型和物理模型混合建模的方式建立膝关节组织和手术器械的虚拟模型,并创建组织和器械间的AABB层次包围盒碰撞检测模型,模拟组织材料的切削去除,基于单点约束的力触觉渲染方法仿真电钻钻孔和摆锯截骨的两种关键手术操作。
1 方法
1.1 几何建模
1.1.1膝关节组织模型
采用CT扫描病患的髋、膝、踝3段关节,将获得的连续断层扫描数据以DICOM文件格式导入医学影像重构软件系统Arigin 3D Pro V3.0(上海昕健,中国),分别从横断面、冠状面和矢状面3个正交解剖断面观察影像信息,对CT图形进行滤波降噪等预处理,通过阈值分割、蒙版编辑、手动填充等图像编辑处理工具提取膝关节骨性组织的轮廓区域,基于二维图像轮廓面绘制的移动立方体算法重建膝关节的三维数字模型,并以STL文件格式保存输出。
1.1.2虚拟手术器械模型
常用的虚拟手术器械几何建模方式包括:逆向扫描原型建模、正向CAD参数化建模。由于逆向技术使用的激光扫描设备较为昂贵,建模成本偏高,所以研究采用合作医院提供的游标卡尺等精密计量仪器测量手术器械实物,获取关键特征尺寸参数。在正向三维建模软件Unigraphics NX8.0中,根据测量的尺寸数据,对虚拟手术器械进行三维数字化建模,如图1所示。
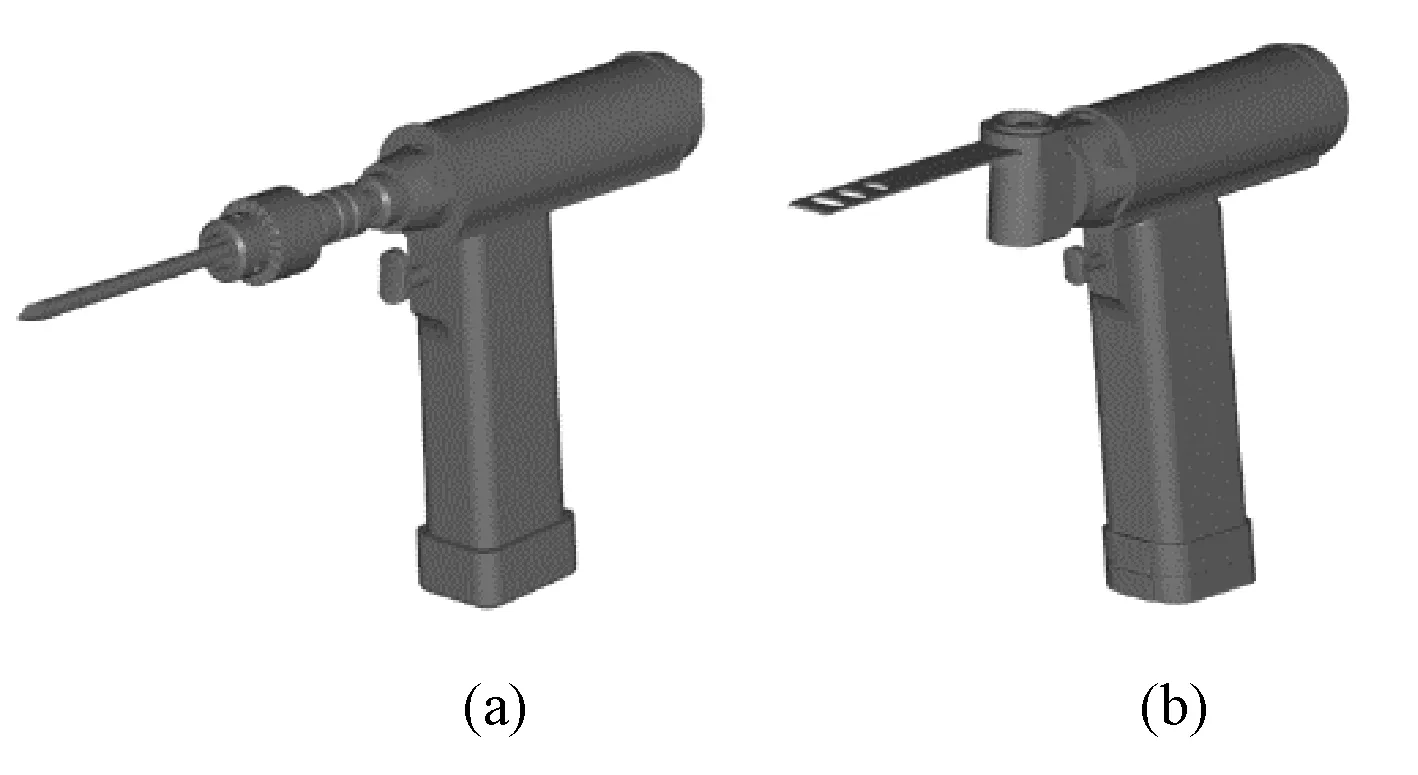
图1 手术器械几何模型。(a)医用电钻;(b)往复摆锯Fig.1 Geometric model of instrument. (a) Medical Drill; (b)Reciprocating saw
1.1.3膝关节置换手术规划
决定医用骨钻钻取骨组织的定位孔成功的关键因素为孔的轴向和深度,而对于往复摆锯切割骨组织,重要的是截骨面的位置和法向。研究应用医学3D手术规划软件系统Arigin 3D Surgical Templating System(上海昕健,中国),根据个性化导航模板辅助膝关节置换手术实施方式,对膝关节骨组织的钻孔轴线和切割平面进行路径规划。同时,将规划路径周围的骨组织分离出来,形成独立的骨组织模型,如图2所示,用于后续局部物理模型的生成。
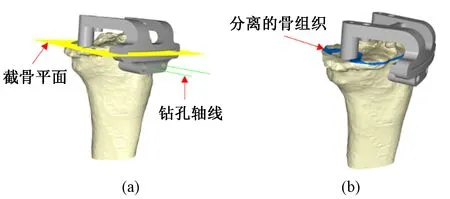
图2 膝关节置换手术规划。(a)路径规划;(b)可视化切割Fig.2 TKA surgical planning. (a) Path plan; (b) Visual cutting
1.2 物理建模
1.2.1三角网格体素化
三角网格几何模型只构建了虚拟对象的表面形状,缺少物体内部材质属性信息,难以实现连续切削的手术过程模拟。而体素模型能够表示虚拟对象内部空间,它以体素(类似于二维空间的最小单位—像素)为基本数据单元,由许多个体素依次有序堆积起来共同组成物体的形状。
研究通过体素化(Voxelization)算法构建虚拟对象的体素模型。体素化是将连续的三角曲面网格模型转换为最接近该对象的体素表示形式,产生体数据集并被二值化处理(即各个体素的值为1或者0,分别表示对象体素和非对象体素)得到对象的体素模型。三角网格体素化算法分为网格模型预处理、体素空间建立和内部体素填充三部分。
1)网格模型预处理。搜索STL三角面片网格模型的顶点集合中的最大值顶点Pmax=(xmax,ymax,zmax)和最小值顶点Pmin=(xmin,ymin,zmin),以这两点为对角线顶点构造网格模型的轴对其包围盒。包围盒沿X、Y、Z轴的长度分别为:Lx=|xmax-xmin|,Ly=|ymax-ymin|,Lz=|zmax-zmin|。将包围盒沿X、Y、Z轴方向的各边根据分辨率Rx×Ry×Rz进行立方体分解,总共获得nx×ny×nz个立方体,立方体单元尺寸为lx×ly×lz,即
(1)
2)体素空间建立。以最小值顶点Pmin为原点,以向量I=(lx,0,0)、I=(lx,0,0)、K=(0,0,lz)与欧氏空间的X、Y、Z方向一致为基向量,构造一个标度为整数的三维直角坐标系,称为体素坐标系。坐标系构成的空间称为体素空间3,体素空间是一个三维离散空间,是三维欧氏空间3的子集(3⊂3)。用(x,y,z)表示欧氏空间的坐标,用(i,j,k)表示体素空间的坐标。体素空间和欧氏空间之间的坐标转换满足如下关系,有
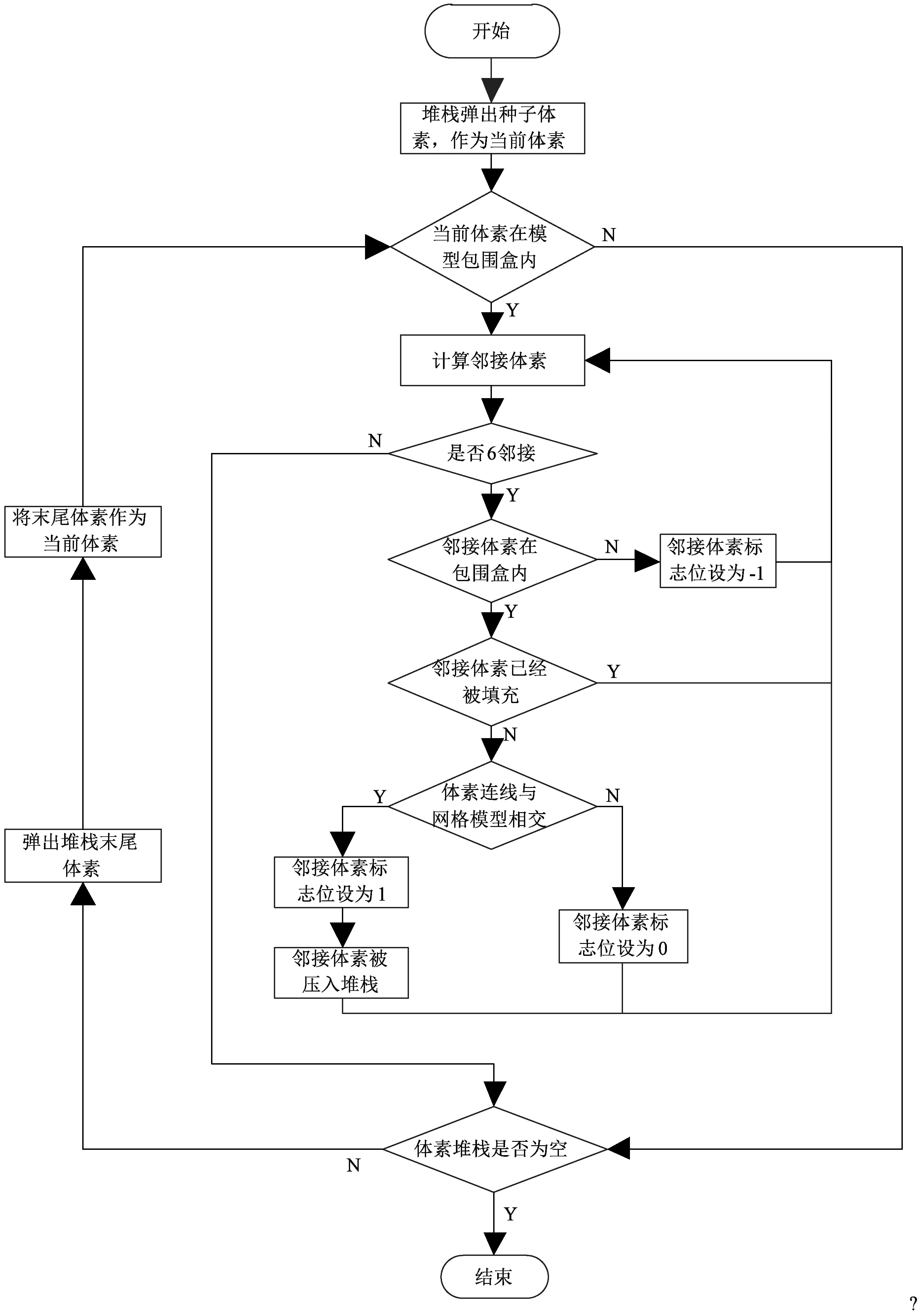
图3 体素填充算法流程Fig.3 Flow chart of voxel filling algorithm
(2)
3)内部体素填充。采用三维种子填充算法填充网格内部体素,分别搜索与种子体素以面连接的邻接体素,通过循环判断避免体素被重复填充。填充算法的流程如图3所示。
步骤1,从体素堆栈中弹出种子体素,作为当前要填充的体素。
步骤2,判断当前体素是否在包围盒内,若不在包围盒内,则退出填充流程,重新选取合适的种子体素。
步骤3,在体素空间中,以1个体素为步长单位,分别沿X、Y、Z正负6个坐标轴方向,搜索邻接的体素。
步骤4,判断邻接体素是否在包围盒内,若不在包围盒内,则邻接体素的标志位设置为-1,并返回步骤3。
步骤5,判断邻接体素是否被填充,若已经被填充,则返回步骤3。
步骤6,判断邻接体素与当前体素之间的连线是否与网格模型发生相交,若未相交,则邻接体素标志位设为0,即表示该体素在网格模型内部,为内部体素;若相交,则邻接体素标志位设为1,即表示该体素在网格模型边界上,为边界体素。
步骤7,当前体素的6-邻域搜索填充完后,判断体素堆栈是否为空,若为空,则退出填充流程。
步骤8,弹出堆栈末尾的体素,并将其设为要填充的当前体素,再次转到步骤2。循环操作,直到堆栈中的体素为空,结束。
体素模型的复杂度和剖分细度直接影响虚拟手术仿真系统交互的实时性,如果剖分的体素粒度过大,在模拟切割去除体素时反馈力会产生不连续的台阶感,导致手术仿真的精确性和力触觉手感下降;随着体素剖分粒度的减小,生成的体素数量增加,仿真计算复杂度加大,难以满足交互的实时性。
1.2.2膝关节组织物理模型
为了较好地平衡精确性和实时性之间的矛盾,通过计算和大量的比对实验,研究选择单元粒度为0.5 mm的体素建立手术规划路径分离部分骨组织的体素模型,形成一系列微小的骨组织单元。基于钻孔轴线周围骨组织的三角网格模型体素化剖分,得到分辨率为40×38×15、总共5 489个体素单元的钻孔轴线体素模型,如图4(a)所示。利用同样的方法,构建截骨平面周围骨组织的体素模型,如图4(b)所示。
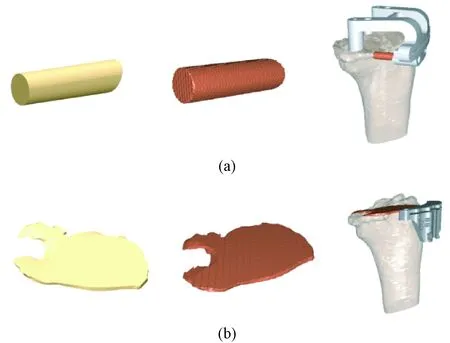
图4 膝关节组织物理模型。(a)钻孔;(b)截骨Fig.4 Knee joint physical model. (a) Drilling; (b) Sawing
1.2.3虚拟手术器械物理模型
建立虚拟手术器械的物理模型,用于模拟手术操作过程中,切削去除膝关节组织材料。根据手术器械工作方式的不同,利用三角网格体素化算法分别建立钻头和锯片的体素模型。为了减少计算量,研究选用单元粒度为0.5 mm的体素,并只建立手术器械作用部位的体素模型,如图5所示。
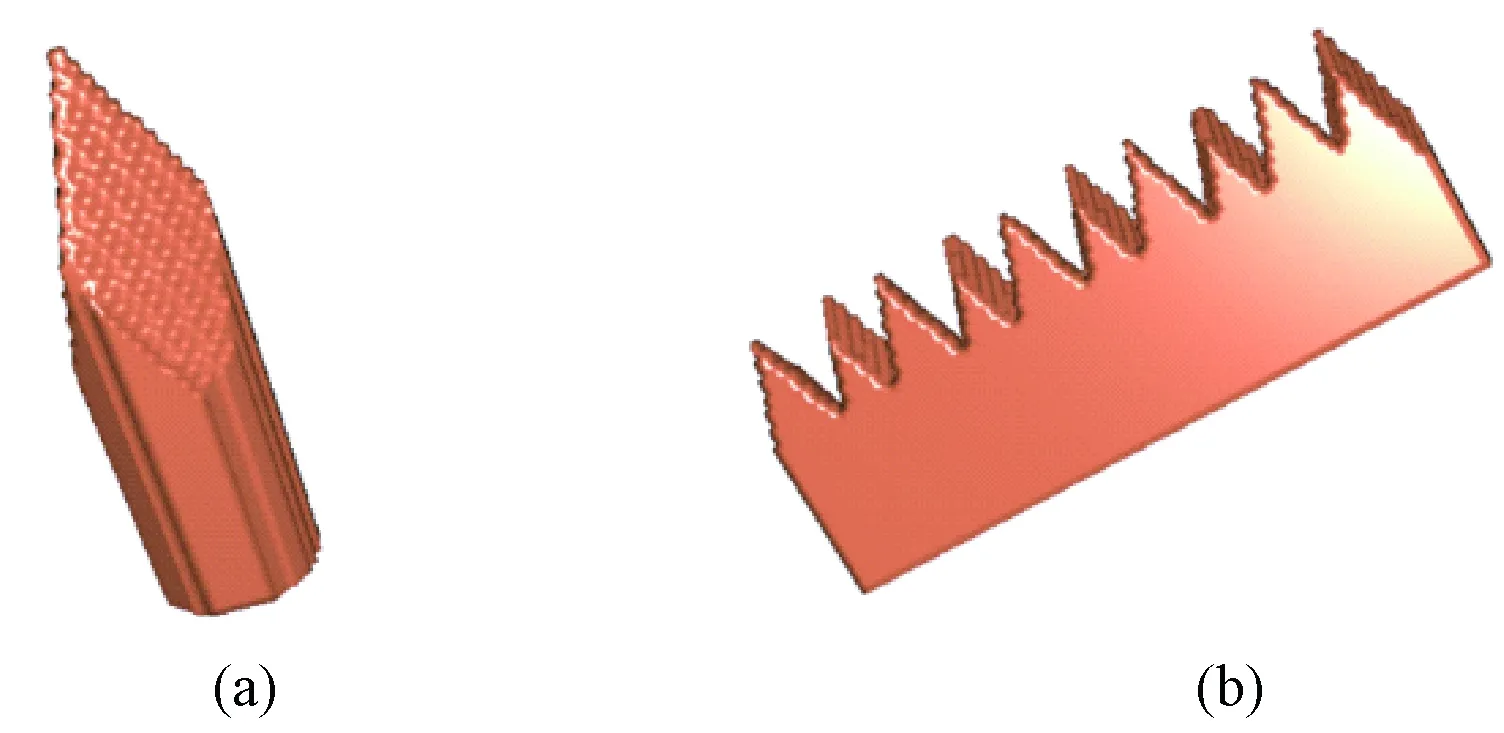
图5 手术器械物理模型。(a)钻头;(b)锯片Fig.5 Physical model of instrument. (a) Drill; (b) Blade
1.3 力反馈渲染
1.3.1力触觉模型
力触觉接口(haptic interface,HI)是力反馈设备中作用部位在计算机虚拟环境中的化身代表。Phantom力反馈设备用单个代理点表示终端执行器在计算机虚拟环境中的化身。用户操作设备手柄控制力触觉渲染接口的6自由度空间位置姿态,通过坐标映射得到虚拟环境中代理点的同步位姿,代理点与虚拟模型之间进行碰撞检测和反馈力计算。为了构建高仿真度的手术器械力触觉模型,研究将代理点计算设置到手术器械模型的尖端作用部位,如图6所示,例如医用骨钻的切削刃头,往复摆锯的锯齿,利用该尖端模拟与虚拟解剖组织的手术交互。
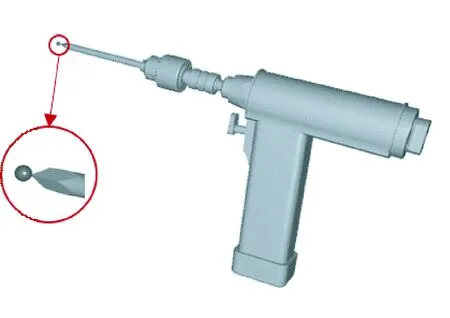
图6 虚拟手术器械力触觉模型Fig.6 Force tactile model of the virtual instrument
1.3.2碰撞检测
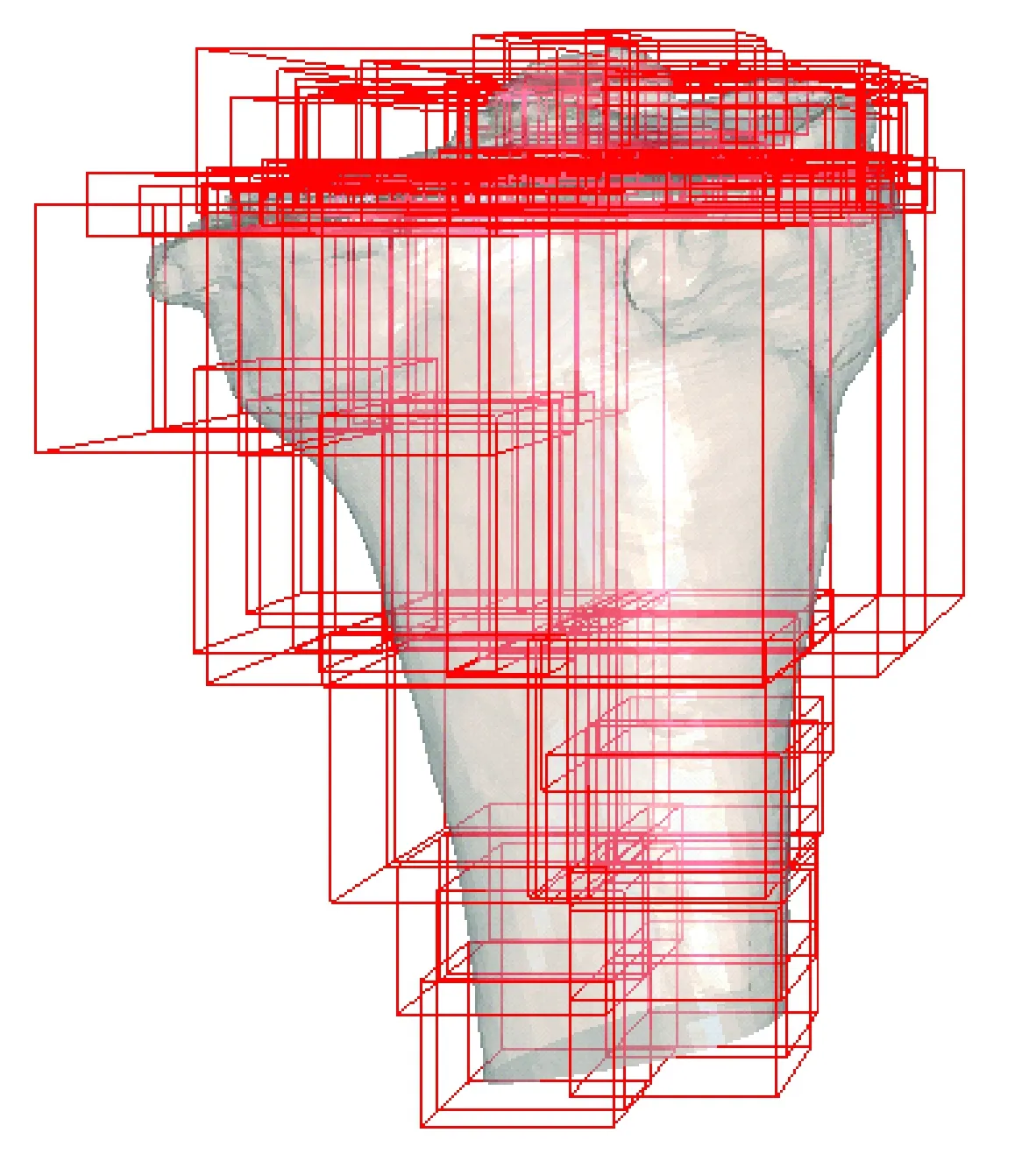
图7 膝关节组织的碰撞检测模型Fig.7 Collision detection model of the knee
虚拟手术仿真系统中需要实时检测虚拟手术器械是否与膝关节组织模型发生碰撞,只有发生碰撞后,才有必要实施后续反馈力的计算和组织的切割变形。针对虚拟手术环境的复杂性,研究采用自顶向下的方式构建膝关节组织的轴对齐包围盒(aligned axis bounding Box,AABB)层次树,如图7所示。基于力触觉接口代理点的空间位置及其作用方向的延伸点,构建虚拟手术器械的包围盒。通过遍历解剖组织包围盒层次树测试碰撞相交,记录相交的位置法向信息。
1.3.3组织的切割形变
组织的切割形变是去除手术器械模型与关节组织交互碰撞部分的体素模型,课题用体素模型间相交时,空间位置重合的方法模拟组织的切割形变,过程如图8所示,将手术器械的体素模型由离散坐标转换为连续坐标表示;判断手术器械每个体素单元的连续坐标位置是否在关节组织模型的包围盒内,若不在,说明手术器械参与检测的部分未与关节组织发生相交,若在的话,需要将手术器械体素单元的连续坐标转换为关节组织体素空间下的离散坐标,也就是二者相交部分的体素单元,将其存入关节组织的体素删除队列中;遍历检测完成后,从关节组织的体素模型中删除相交的体素,并更新该体素模型。
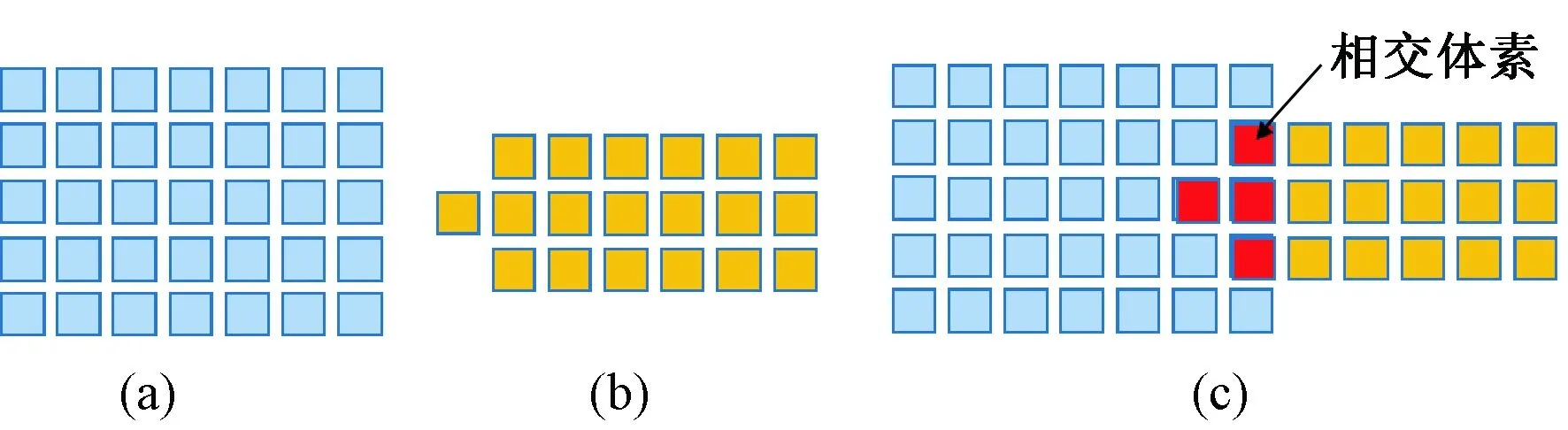
图8 组织切割形变的平面示意。(a)组织体素模型;(b)器械体素模型;(c)切割形变过程Fig.8 The plan sketch of cutting deformation of tissue. (a) Voxel model of tissue; (b) Voxel model of instrument; (c) the process of cutting deformation
1.3.4接触的反馈力
接触反馈力的计算采用经典的单点约束力觉渲染方法。在考虑虚拟组织表面约束的情况下,用代理点proxy表示力触觉接口的理想位置,用另一点god-object表示遵从实际表面约束后的位置。当proxy与虚拟物体没有发生碰撞接触时,god-object与proxy的位置坐标重合,如图9(a)所示;而当proxy的运动轨迹穿过虚拟物体表面发生碰撞时,god-object的位置被表示为约束表面到proxy距离最短的点,如图9(b)所示。基于胡克定律计算接触反馈力的大小,有
F=k·Δx
(3)
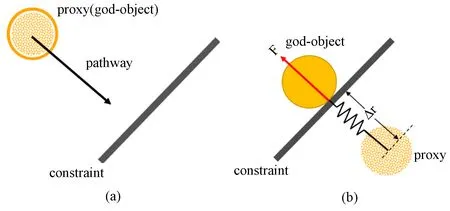
图9 力触觉渲染示意。(a)未发生碰撞;(b)发生碰撞Fig.9 Diagram of force rendering. (a) No collision occurred; (b) Collision occurred
式中,k为虚拟解剖组织的刚度参数,Δx为手术器械刺入组织的深度距离。
1.3.5手术器械的振动力
在虚拟手术器械模型上添加正弦形式的连续力信号,用于模拟真实电动式手术器械的振动效果。
F′=Asin(2πft)
(4)
式中,A为振动力的振幅大小,f为施加振动力的变化频率,t为手术仿真的时刻。
根据电钻和摆锯不同的工作方式设置振幅A和频率f合适的参数值。
1.3.6反馈合力的输出
接触作用的反馈力与附加的器械振动力叠加合成,即为反馈合力。由于力反馈设备的输出力阈值为3.3 N,所以生成的反馈合力需要缩放比例才能输出给设备。
F合=ε(F+F′)
(5)
式中,ε为反馈力缩放系数,F为接触反馈力,F′为器械震动力。
1.4 系统设计
1.4.1硬件设备
主计算机是虚拟手术仿真系统的核心硬件,它控制集成了系统的其他组成硬件设备和软件模块,用于处理大量的碰撞计算和图形绘制等工作。虚拟手术仿真系统开发的主计算机配置如表1所示。
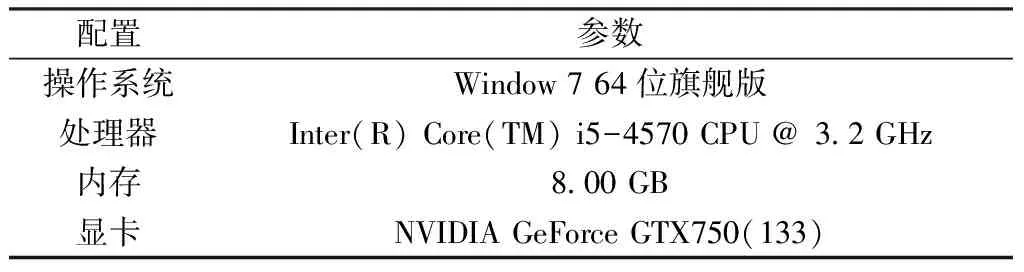
表1 主计算机的配置参数Tab.1 Configuration parameters of computer
力触觉交互设备为用户提供了和虚拟环境进行触觉交互的工具。研究选用由美国麻省理工大学的Massie等设计发明的桌面式力反馈设备Phantom[25],具有6自由度位置传感输入,包括X、Y、Z3个坐标轴方向的旋转和移动;同时支持X、Y、Z3自由度的反馈力输出,最大输出的反馈力为3.3 N。另外,研究基于增材制造技术,打印器械手柄的实体模型与力反馈设备主体连接,如图10所示,改进系统原型的笔杆式手柄。
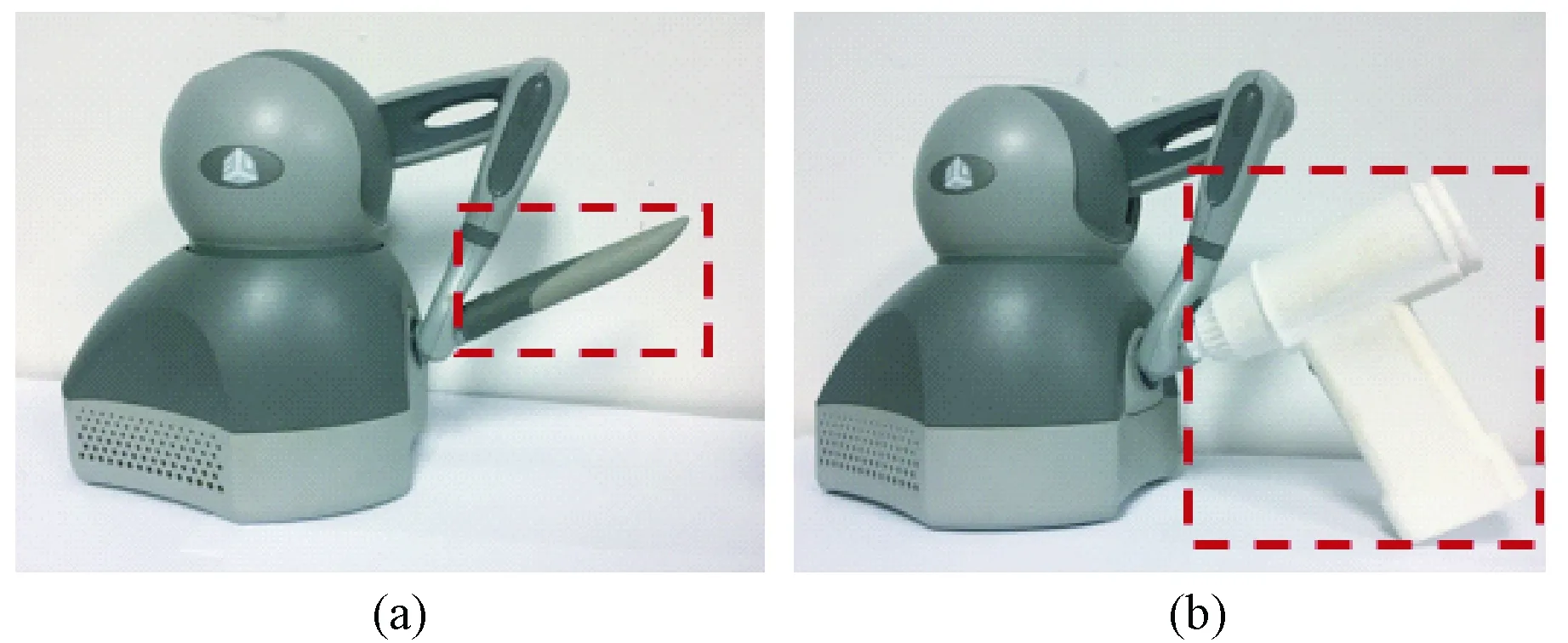
图10 力反馈设备Phantom。(a)笔杆状;(b)打印手柄Fig.10 Force feedback Phantom. (a) The stylus handle; (b) The 3D printing handle
1.4.2软件接口
研究以VisualStudio 2010作为软件集成开发环境,使用C++作为系统开发语言,采用微软基础类库MFC设计人机交互界面,基于虚拟仿真引擎CHAI 3D和图形标准库OpenGL等开源程序构建支持力反馈的虚拟膝关节置换手术仿真系统。其中,CHAI 3D[26](Computer Haptics and Active Interfaces)是系统开发的核心程序库,由斯坦福大学机器人与人工智能实验室开发,提供和力反馈设备Phantom通信的接口,获得终端执行器的全局和局部位置方向。
1.4.3系统设计
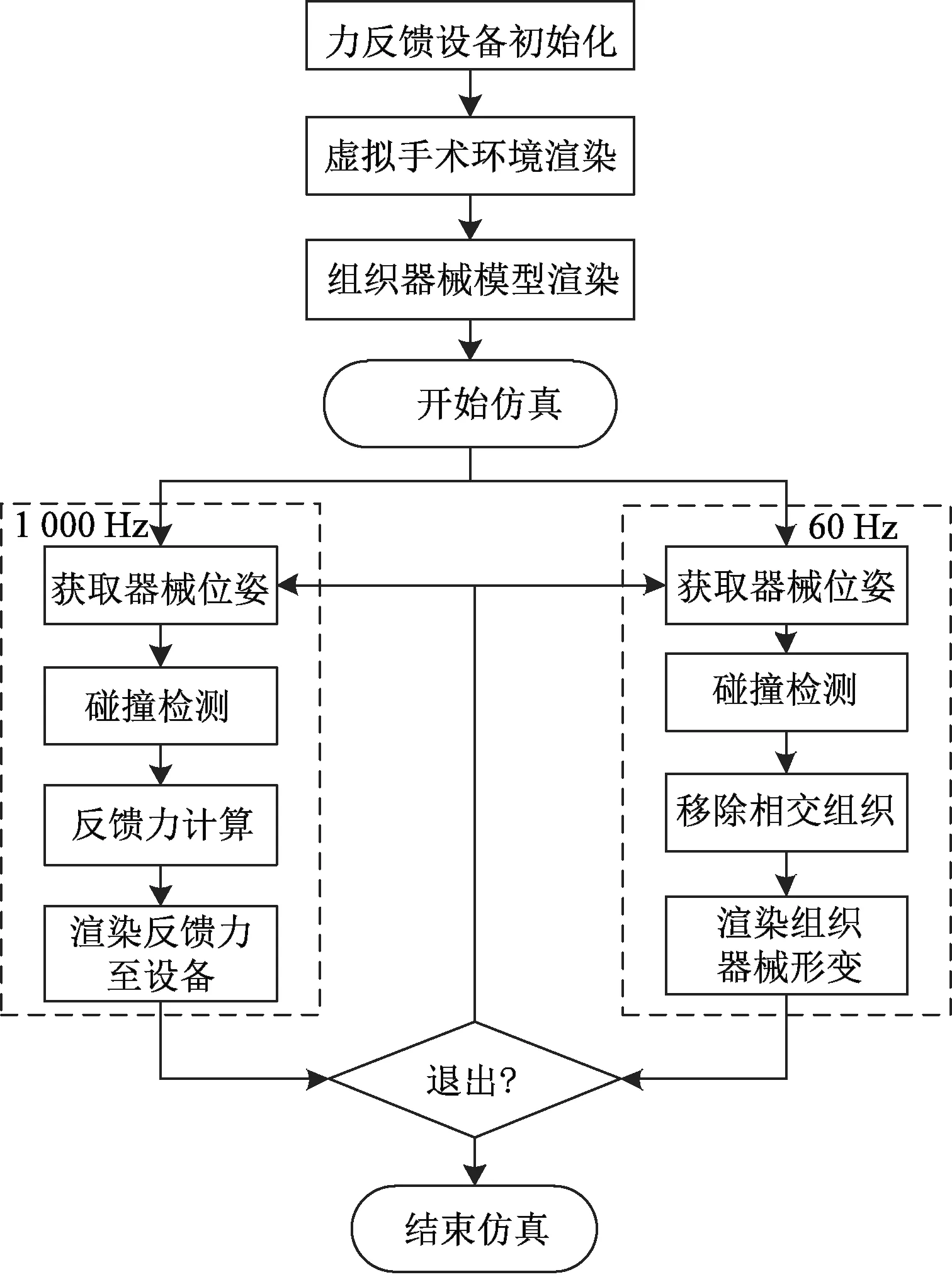
图11 虚拟手术仿真系统工作流程Fig.11 The flowwork of virtual surgery simulation system
系统的整体设计工作流程如图11所示,连接力反馈设备和主计算机之间的通信调试,分别渲染虚拟手术环境、虚拟膝关节组织、手术器械模型。系统采用虚拟视觉渲染和虚拟力触觉计算两个线程模拟膝关节置换手术过程。虚拟视觉渲染线程主要处理手术模拟过程中,虚拟手术器械位置变化、与膝关节组织发生碰撞、切割形变的渲染,线程的刷新频率保持60 Hz;虚拟力触觉计算线程负责虚拟手术器械位置的实时更新、器械与膝关节组织的碰撞检测、相互作用反馈力的计算和输出等工作,线程的刷新频率保持1 000 Hz。
1.5 系统评估
1.5.1一般资料
从合作医院单位选取20名自愿参加本次研究的住院规培医师,入选标准:具备基本的关节置换手术理论知识,既往尚无独立实施关节置换手术的经验;将20名医师随机分为对照组和实验组,每组10人;两组成员的一般资料经比较后无明显差异(P>0.05),具有可比性。
1.5.2实验方法
系统评估实验开始前,先对实验组的学员进行8~10 min的系统和设备使用培训,然后每位成员应用膝关节置换手术仿真系统分别训练7次,最后让实验组和对照组的所有成员参加3D打印尸体模型的实际手术操作,记录每人完成的操作时间,并由主治医师给出评分意见;结束后,对实验组进行全面的问卷调查,每个问题10分制,其中1~3为差、4~6为一般、7~8为良好、9~10为优秀,主要包括系统的逼真性、实时性、交互性及综合性能等方面的评价指标。
1.5.3统计学方法
运用SPSS18.0软件统计分析实验数据,对实验组和观察组实际模型操作采用独立样本t检验,问卷调查采用单样本t检验,以P<0.05表示差异有统计学意义。
2 结果
2.1 系统实现
基于以上方法和设计方案,构建的支持力反馈的个性化虚拟膝关节置换手术仿真系统如图12所示。力反馈设备与计算机连接初始化成功后,系统导入膝关节置换术前规划方案。手术仿真演练过程中,操作者手持力反馈设备的3D打印手柄控制虚拟手术器械的运动,通过高频率的触觉刷新线程来保证二者的空间位置和姿态达到同步。当系统检测到虚拟手术器械与膝关节组织间发生接触碰撞,便会记录和删除碰撞的体素,视觉渲染线程利用GPU加速更新变化后的体素模型,同时力触觉渲染线程实时计算相互作用的反馈力并反馈给操作者,从而模拟膝关节置换手术的目的。
2.2 人机交互界面
系统软件的人机交互界面如图13所示,由交互面板①、信息标签②、三维视图③、向导指示④和状态栏⑤等组成。交互面板便于用户交互控制膝关节置换手术仿真过程的各个操作环节;信息标签实时监控系统图形和力触觉的渲染更新频率以及力反馈的大小;虚拟膝关节组织和手术器械模型均在三维视图内渲染生成;向导指示以图片的形式指导手术的每个操作环节;状态栏同时提供一些手术辅助工具,例如手术计时、操作提示、器械位置信息等。
2.3 膝关节置换术仿真
2.3.1钻孔仿真

图12 虚拟手术仿真系统全貌Fig.12 The overview of virtual surgery simulation system
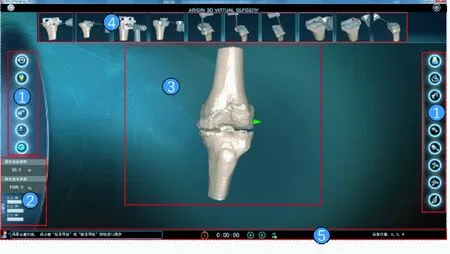
图13 系统人机交互界面Fig.13 The interactive interface of simulation system
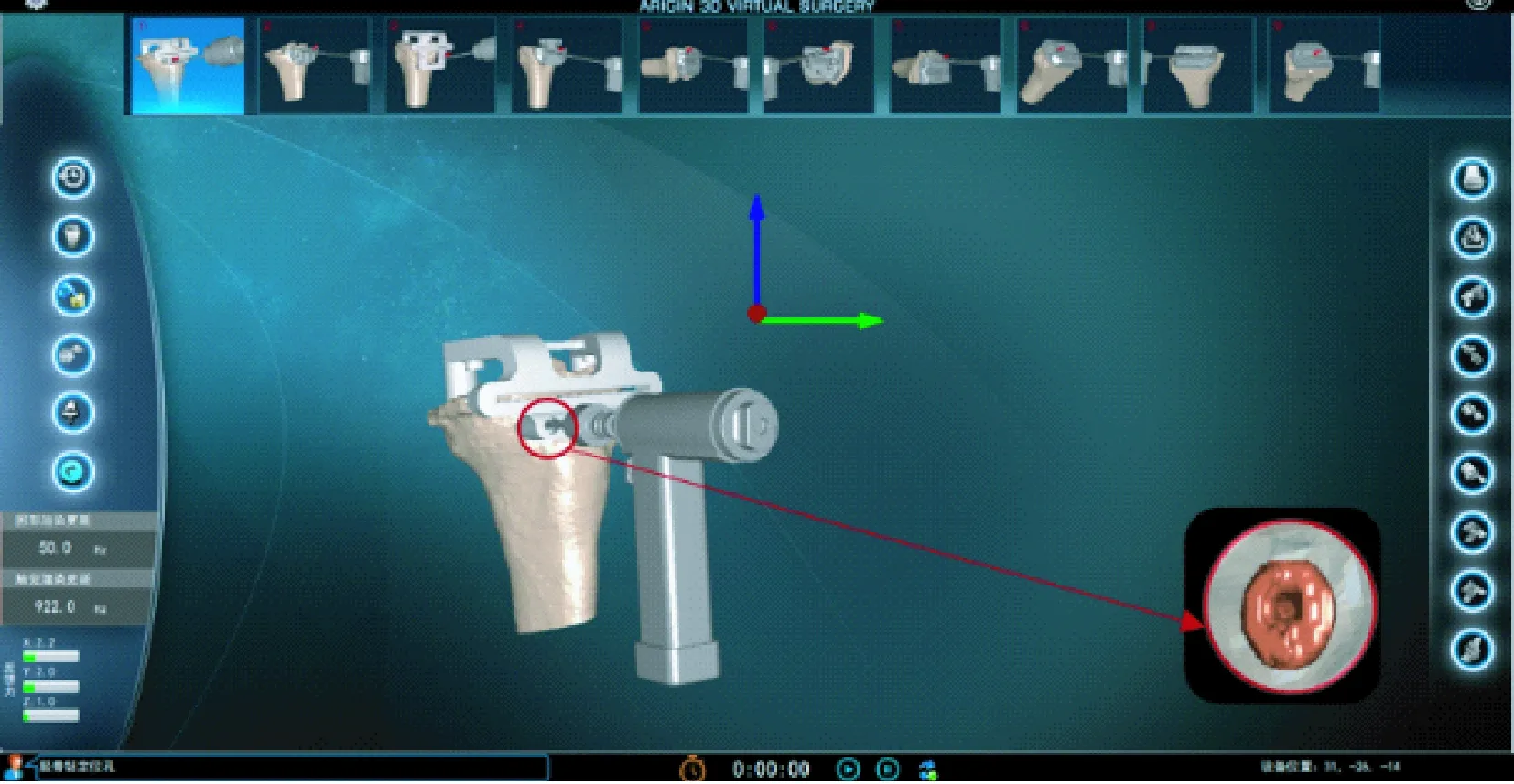
图14 膝关节置换钻孔仿真Fig.14 The drilling simulation of TKA
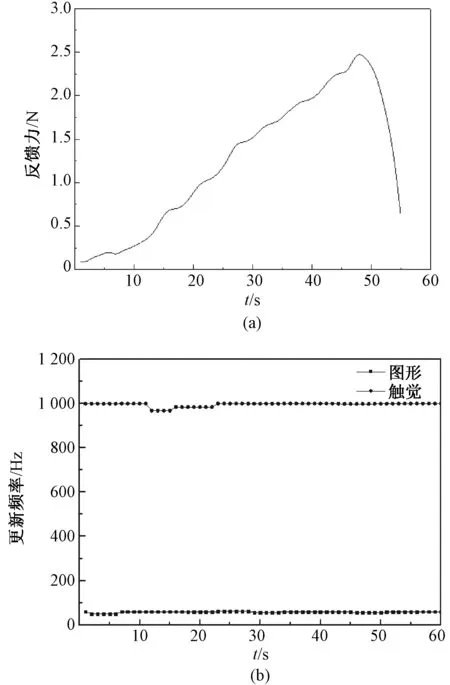
图15 仿真系统的响应。(a)反馈力变化趋势;(b)系统更新频率Fig.15 The response of simulation system. (a) The trend of force feedback; (b) The update frequency of system
膝关节置换手术钻孔仿真过程如图14所示,打开力反馈设备开关,虚拟电钻的钻头部位高速转动,同时手柄部位伴有轻微幅度的震动效果。操纵虚拟电钻沿定位导航模板的孔道(术前规划的钻孔轴线)运动,当钻头与膝关节组织发生接触碰撞时,去除钻孔部位的组织材料,如图右下角的局部放大所示,并根据钻入的深度计算输出合适的反馈力。图15(a)反映钻孔过程中反馈力随时间的变化趋势,初始钻孔时,由于钻孔深度的增加,反馈力逐渐增大,当拔出钻头时,反馈力急剧减小;图15(b)反映在模拟钻孔过程中,可以看出,图形更新的频率在60 Hz上下波动,而力触觉线程的更新频率也维持在1 000 Hz左右。
2.3.2截骨仿真
膝关节置换手术截骨仿真过程如图16所示,打开力反馈设备开关,虚拟往复摆锯的锯片部位绕夹具中心轴呈左右往复摆动,手柄部位同样具有震动效果。操纵虚拟往复摆锯沿截骨器的刀槽平面(术前规划的切割平面)运动,当锯齿与膝关节组织发生接触碰撞时,切割去除截骨路径上的骨组织,如图右下角的局部放大所示。
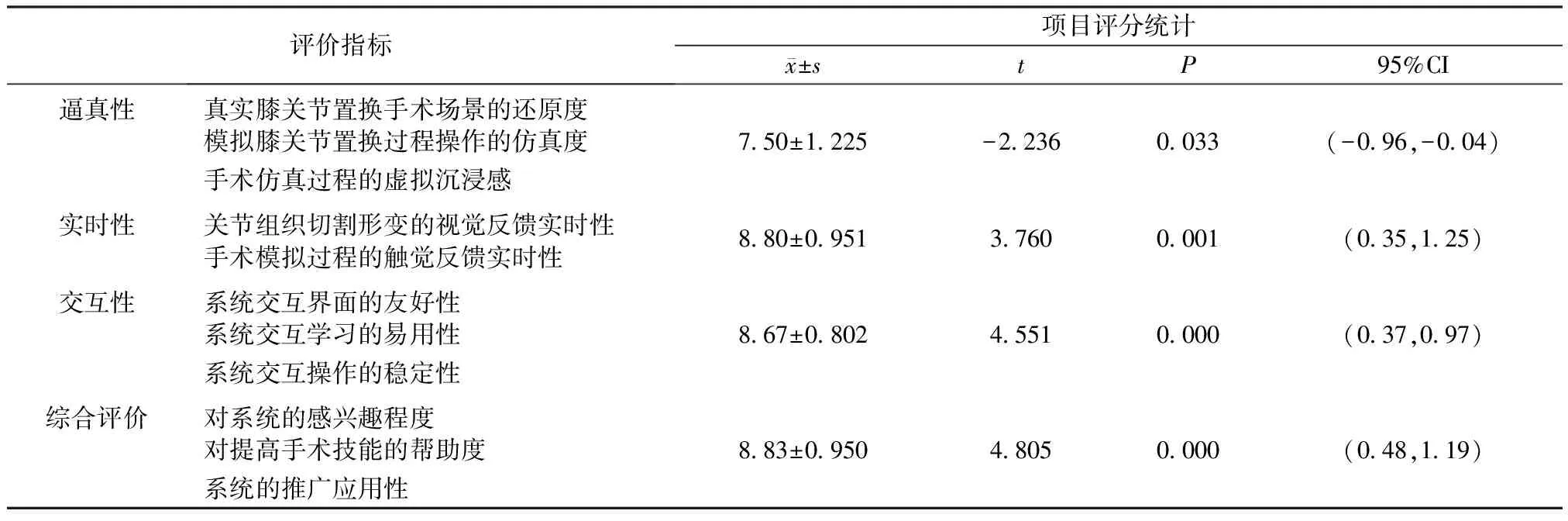
表2 系统问卷调查评估结果Tab.2 The results of questionnaire survey about system
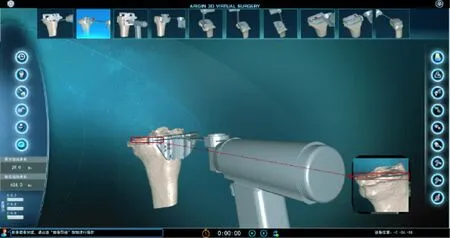
图16 膝关节置换截骨仿真Fig.16 The sawing simulation of TKA
2.4 系统评估
实验组在3D打印模型上的实操时间为(9.604±0.596) min,相比对照组的实操时间(16.261±1.341) min有较大幅度降低,并且统计分析结果显示,用过虚拟手术仿真系统训练和未参加过训练的在操作时间上存在显著性统计学差异(P=0.04<0.05)。另外,对系统问卷调查的评估结果如表2所示。从结果来看,用户对系统的各方面性能,包括系统的逼真性、实时性等的评价均在“优良”等级,并与平均优良水平(8 分)存在显著性差异,皆在该水平之上,说明研究构建的系统能够满足用户的基本训练需求。
3 讨论
传统的关节外科手术训练主要以尸体标本、活体动物、人造模型等工具为主,有的甚至在同伴或病人身上练习。由于尸体标本特殊的获取途径,通过志愿者捐献或者医院购买,导致资源极度匮乏,相应的价格成本极高;活体动物的生理组织结构与人体存在显著差异,并且遭到设备的道德伦理谴责;人造模型的使用虽然在一定程度上缓解了现有的培训窘状,但因其不能反复使用,极大地浪费能源材料,间接增加训练成本。虚拟手术仿真系统作为一门涉及计算机技术、图形学、数字医学、传感器技术、弹性力学、生物力学、力反馈技术等多学科交叉与渗透的新型技术,极度真实地解剖组织数字模型,可供训练者反复使用,具有节约经济成本、减少资源浪费、降低学习周期等优势;另外,区别于传统的可视化手术仿真,虚拟手术仿真系统能够提供视觉和力触觉的实时交互反馈,使医师通过术前规划演练对术中情况有充分的把握和准确的预测。
本研究通过对支持力反馈的虚拟膝关节置换手术仿真系统的研究,实现了该手术电钻钻孔和摆锯截骨的两种关键操作方式,具有以下几点创新之处:首先,研究以3D打印个性化导板辅助的膝关节置换手术为仿真对象,这区别于其他传统的常规骨科手术方式,融合了手术规划、3D打印和手术仿真等多项交叉技术,有助于提高学员对个性化精准手术的概念认知和实际应用;其次,目前多数骨硬组织仿真都只建立组织的几何模型或者物理模型,手术器械只用几何模型表示,不存在实际手术器械的物理属性表示,并且手术操作路径沿任意位置或方向,而本研究在此基础上,建立了手术器械的物理模型,同时还模拟实现沿手术规划路径钻孔和截骨两种不同手术操作过程中的组织形变和力触觉反馈。
良好的虚拟手术仿真系统需要具备实时性、交互性和逼真性等重要特征,实时记录手术模拟过程中系统的图形和触觉刷新频率,结果显示分别持续维持在60和1 000 Hz范围左右,没有出现较大波动,说明系统的实时性能良好,不存在严重的反馈延迟现象;另外,通过邀请规培医师对本研究构建的虚拟膝关节置换手术仿真系统的体验评估,由于实验组应用仿真系统已经熟悉强化手术流程以及术中操作的要点和力度感知,所以实际手术操作训练时间有显著的降低(P<0.05),说明系统在实际应用中具有良好的训练转换效度;从问卷调查的结果来看,用户对系统的3个性能指标较为满意,说明系统较大程度还原了手术现场,手术操作反馈真实,有助于用户提高手术技能。
本研究存在以的局限性。首先,仅用单个力触觉接口代理点代表虚拟手术器械的作用部位,相应地与虚拟膝关节组织的接触也仅为点接触,与实际手术器械的作用方式(线接触或面接触)存在差别。下一步的工作重点将根据虚拟手术器械的工作样式,例如麻花钻的切削刃、往复摆锯的锯齿,通过设置多个代理点建立精确的力触觉模型,从而提高虚拟膝关节置换手术仿真系统的逼真度。其次,系统应用的显示器提供的视觉反馈属于二维平面效果,在用户操作体验过程中,较难快速准确地把握虚拟手术操作过程的空间位置关系,因此研究有待集成立体显示设备或者头戴式VR眼镜等硬件到仿真系统中,以提供更接近现实环境的3D立体显示效果。
4 结论
本研究以3D打印导板辅助膝关节置换手术作为应用背景,重建虚拟膝关节解剖组织及手术器械等几何物理模型,基于碰撞检测、力触觉渲染生成,实现手术操作的组织材料去除变形及反馈力的更新计算。以力反馈设备为硬件平台,利用触觉引擎和图形库等软件接口,设计构建了支持力反馈的虚拟膝关节置换手术仿真系统。系统具有良好的人机交互界面,实现了手术关键操作步骤钻孔和截骨的实时交互仿真模拟,验证了术前规划方案的正确性;同时通过专业人员的体验评估,有力验证了系统对手术训练提高的帮助性。研究也存在力觉模型单一、沉浸感低等不足之处,后续工作将以此为突破点,进一步完善升级此系统。
