基于超短基线定位系统搜寻沉海装备的设计研究
2018-12-24郑坤鹏卢晓兵卫振彪
郑坤鹏,卢晓兵,卫振彪
(陆军装甲兵学院士官学校,吉林 长春130117)
0 引言
近年来世界各国的飞机、轮船等装备失事沉海事件时有发生,海洋搜救已成为世界关注的问题。国外在20世纪70年代已有水下声学定位设备的产品,我国从80年代开始,也开始研制出不同用途的水下声学定位设备,广泛应用在水下目标搜寻、海洋钻井井口定位及海洋管道作业等方面[1]。当前水下声纳系统在军事领域广泛应用,尤其在海军武器系统中,而在搜寻定位沉没的两栖装备方面尚处于空白,缺少有效的手段和技术,只能依靠海军或地方专业搜寻力量来完成,传统的搜寻方法无论是主动还是被动声纳定位都存在搜寻设备庞大、操作复杂、成本高,对搜寻目标大小依赖性强,搜寻定位精度较低等问题[2]。因此,通过对两栖装备水下搜寻定位系统的研发及使用,能够快速准确的搜寻到沉没的两栖装备并予以定位,以便于后续快速准确的实施装备的捞救作业,具有重要的军事意义。
1 声纳系统的选择
根据声学定位系统定位基线的长度,传统上可将定位系统分为3种类型:长基线定位系统(long baseline,LBL)、短基线定位系统(short baseline,SBL)和超短基线定位系统(ultra short baseline,USBL)[3]。长基阵定位方法定位精度较高,但由于长基阵定位方法需要提前布设水下测听单元,显然与战场作战环境不相符,因此不适宜作为沉水装备搜寻的主要手段。短基线定位方法具有精度高、机动性好的特点,通常要求搜寻船底部布设水听基阵,船体长度要求大于基线长度,如果船体较小也可采取拖拽的方式进行搜寻,虽然短基线定位方法较为可靠但对于搜寻船只要求较高,并不利于进行自主保障,因此也不能成为沉水装备搜寻的主要手段。虽然超短基线定位方法精度不如前两种定位方法,但结合两栖装备的使用情况,其较小的尺寸、便携性和灵活的安装方式通过保障分队正确合理的运用,可以较好地弥补了定位精度方面的缺陷,能够较为灵活高效的对沉没两栖装备进行搜寻定位。此外,为了有效地消除海洋噪音干扰,优先选择超短基线频谱范围的声纳,保守认为海洋噪声谱级为20 kHz时,根据经验公式可求得在20 kHz处海洋噪声谱级,此时只要声强大于40 dB,就可以有效传出,由于选用声纳为15 kHz声强为大于186 dB,排除3 km范围的声强衰减,这是一个很高的检测域,容易实现对声源目标的检测。针对搜救装备自身产生的干扰噪音,可以通过暂停发动机的人为手段加以控制。因此,对于近海岸的两栖装备水下搜寻定位系统的研发采用超短基线声纳系统。
2 系统的主要组成及工作原理
两栖装备水下搜寻定位系统由各自独立的水面侦测声纳和水下声纳信标两部声纳组成。水面侦测声纳分系统装备于搜寻装备,如两栖装备抢救抢修车上,而水下声纳信标装备于失事装备。
2.1 水面侦测声纳
水面侦测声纳分系统由收、发分置换能器基阵和信息处理系统两部分构成。侦测声纳的换能器基阵设计为收、发分置,接收换能器基阵空腔内装有电子罗盘,换能器基阵如图1所示。
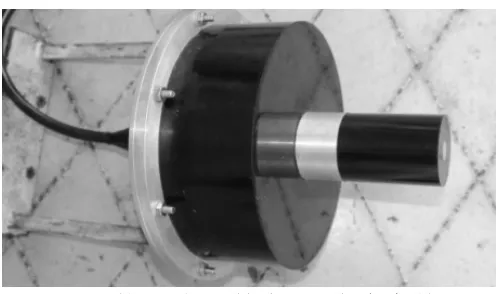
图1 侦测声纳换能器基阵实物图
2.1.1 侦测声纳换能器基阵
侦测声纳发射换能器基阵设计为全向发射的圆管状,其主要技术指标为:工作中心频率:15 kHz±30 Hz;发射声源级:不小于186 dB.
侦测声纳发射声源级SLA为:

式中:PaA为侦测声纳发射换能器激励的声功率;DIT为发射指向性指数(DIT=0)。
设SLA=186 dB,由公式(1)可得,侦测声纳发射换能器激励的声功率约等于34 W.
侦测声纳接收换能器基阵设计采用36元组成的圆形,主要技术指标为:工作中心频率为16.5 kHz±30 Hz,工作带宽不小于±450 Hz;水平波束宽度不小于20°,基元数36个。水听器在圆形接收换能器基阵圆弧上以半波长排列,所以圆形接收阵直径为D=N·(λ0/2)/π≈ 28.6 cm,圆形接收阵的水平波束开角θh=88/(0.286×15)≈20.5°.如图2所示,在圆形接收阵在水平360°范围内共形成36个波束,18个波束位于水听器顶端,另外18个波束位于相邻两个水听器中央下方,波束相互交叉出现,其间隔为10°.因为加权后波束宽度大于波束间隔,所以波束束宽可以在相互覆盖中满足水平360°范围,既全向侦测声纳基阵。侦测声纳接收采用11或12个阵元形成接收波束,则圆形接收阵的接收指向型指数,侦测声纳及水下声纳信标的接收均采用窄带过滤DIA≈13 dB,相应的检测阈为:

式中:d为检测指数;τ为发射脉宽。
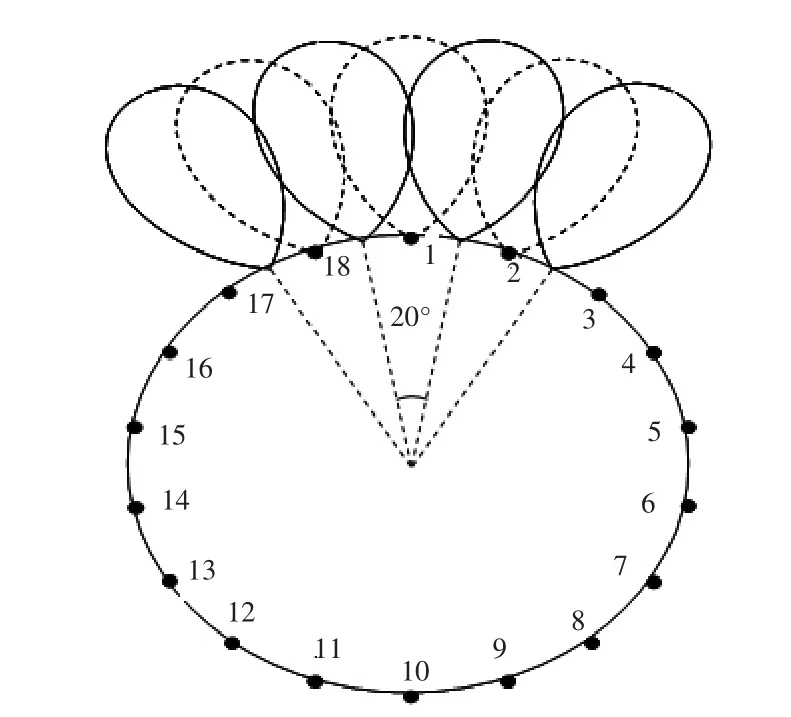
图2 圆形接收阵波束布置示意图
设检测概率PD=80%,虚警概率PF=0.1%,根据ROC曲线[4]可得d=16,由公式(2)可得接收的检测阈DT=20 dB.
发射换能器的优质因数FOMA→B为:

式中:NLB为水下声纳信标接收端噪声;DIB为水下声纳信标接收指向性指数;△B为水下声纳信标接收FFT裁断损失。设NLB=75 bB、△B=3 bB,则由公式(3)可得 FOMA→B=88 dB.

式中:R(A→B)MAX为侦测声纳到水下声纳信标的最大作用距离;α为15 kHz信号的传播损失。
设 α =2 dB/km,由公式(4)可得 R(A→B)MAX≈6 km,由此可知,侦测声纳到水下声纳信标的最大作用距离为6 km.
2.1.2 信息处理系统
信息处理系统则由发射单元、信号处理单元及显控终端及其他硬件等部分组成,其实物图与工作示意图分别见图3、图4.
图3 信息处理系统实物图
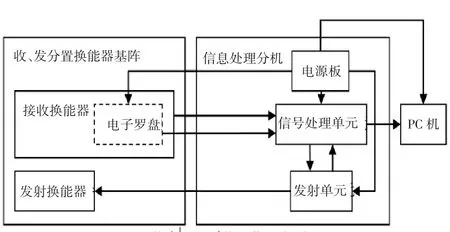
图4 信息处理系统工作示意图
发射单元主要由功放、匹配和GPS接收模块组成,其功能是接收GPS数据和根据信号处理单元给出的命令定时发射唤醒信号,主要技术指标为:工作中心频率为15 kHz±30 Hz;信号形式为单频脉冲信号(CW);发射脉冲宽度为80ms;发射电功率不小于120 W;发射功放路数为1;供电为300 W、24 V直流电。
信号处理单元主要由前放板和信号处理板组成。前放板的功能是完成18路阵元输出信号的放大、滤波,以及电路中的时控和手控衰减,手控码和时控码则由信号处理板发送。信号处理板的功能是完成18路数据的A/D采样、波束形成,对波束数据进行点化和判别,承担信息处理系统与PC机之间的信息传递(通过网络将波束数据、GPS数据、电子罗盘数据实时发送到PC机)和综合控制(接受PC机的控制命令及对发射和前放发送控制命令),信号处理板的功能框示意图如见5图所示。图中电子罗盘采用Honeywell公司的数字电子罗盘,其功能是给信息处理系统提供航向、俯仰、横滚等数据。显示控制单元安装在指挥或搜救装备上,为搜救人员直观的提供搜寻航向依据。显控终端根据搜寻需求控制搜寻端发出询问信号,并将接收的回答信号解算信息,通过GPS定位系统解算出目标的地理坐标。

图5 信息处理板功能框示意图
2.2 水下声纳信标
水下声纳信标由收、发公用换能器和电子舱两部分构成,而电子舱则由发射单元、信号控制单元和电源单元三部分组成(如图6、图7所示)。电子舱中发射板功能是声纳信标在水下一定深度压力传感器启动蓄电池后,通过变换器给电子舱内部各部分供电及根据信号控制板给出的命令发射应答信号。电源是蓄电池,是给变换器供电,根据设计要求可以满足30天的供电时间。

图6 声纳信标示意图
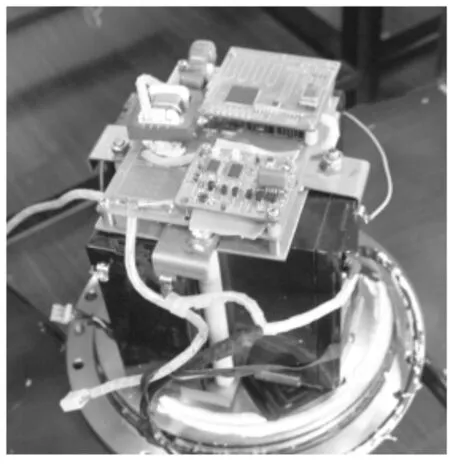
图7 声纳信标发射单元实物图
水下声纳信标换能器基阵为收、发共用的全向圆管状,其主要技术指标为:工作中心频率为15 kHz±30 Hz;发射声源级不小于183 dB;工作带宽为不小于±450 Hz;全向发射。
水下声纳信标的发射声源级SLB为:

式中:PaB-水下声纳信标发射换能器激励的声功率;DIT-发射指向性指数(DIT=0)。设 SLB= 183 dB,由公式(5)可得,水下声纳信标发射换能器激励的声功率约等于17 W.
水下声纳信标发射换能器的优质因数FOMB→A为:

设 NLSA= 85 dB、△A=3 dB,由公式(6)、(7)可得R(B→A)MAX≈6 km,因此,水下声纳信标的最大作用距离也是6 km.
2.3 工作原理
两栖装备水下搜寻定位系统作用方式为回馈问答式,水面侦测声纳分系统通过发射换能器向水下发射特定频率特定编码的询问声纳,水下声纳信标通过公用换能器接受到询问信号并被唤醒,同时发射特定编码的回馈应答声纳信号。当信标装置随失事装备下沉时,压力开关将信标的电源接通,等待接收搜寻装备上侦测声纳发射的唤醒信号。当无唤醒信号时,水下信标仅处于静默状态,当水下信标接收到侦测声纳设备发射的唤醒信号后,水下信标则发射一个应答信号(即收、发工作状态)。侦测声纳在接收到水下信标发射的应答信号后,可以测量出失事装备的距离(斜距)和方位,侦测声纳设备周期性发射唤醒信号时,应答信号也是周期性地出现,通过与GPS定位系统换算,侦测声纳给出失事装备的地理坐标参数,并通过显示终端呈现给指挥员。
由此可知,搜寻装备上的侦测声纳和失事装备上的声纳信标均需工作在收发状态,侦测声纳具有定向、测距功能,声纳信标只需全向搜索工作,两设备均处于单程传播接收状态。具体关系为:水下声纳信标接收侦测声纳设备的唤醒信号,侦测声纳设备接收水下声纳信标的应答信号。
3 试验验证
3.1 试验条件
两栖装备水下搜寻定位系统是在海况不大于三级、良好水文条件(等温层)下工作,搜寻装备上侦测声纳安装部位噪声谱级不大于85 dB(参考级为1 μPa,工作中心频率15 kHz处),失事装备上声纳信标安装部位暴露在平坦泥沙底上并离水面距离不大于60 m,失事装备暴露部位噪声谱级不大于75 dB(参考级为1 μPa,工作中心频率15 kHz处)的条件下。在清澈海水中(海水声衰减系数),水面搜寻定位系统声学基阵可以在3 km范围内侦测到信标发出的声纳信号,并能够解算出相关数据。
3.2 试验方案
首先将侦测声纳换能器基阵固定于试验大船并降入水下4 m左右,再在试验小船上将水下声纳信标垂吊入水(如图8、图9、图10所示)。试验开始后,试验小船在与试验大船距离R约200 m~3 000 m的范围内运动(试验环境中开阔水域最远距离约2 600 m),并在试验小船上使水下声纳信标的入水深度在10 m~60 m之间变化,通过将侦测声纳与电脑连接,观察显示终端的显示扫描是否发现目标。
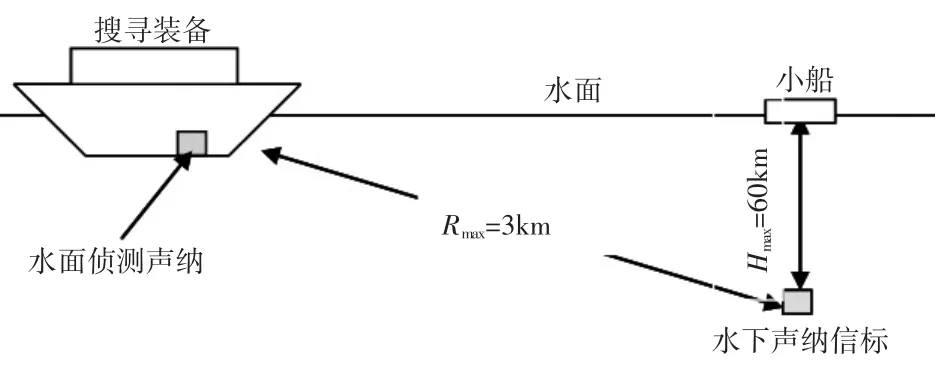
图8 系统安装示意图
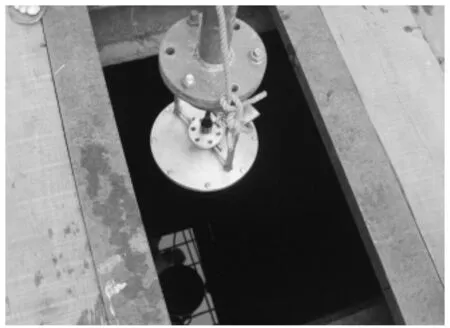
图9 侦测声纳固定在大船上
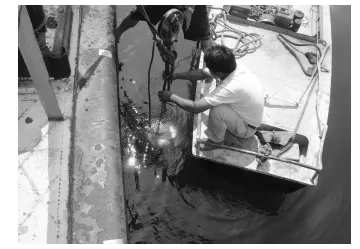
图10 声纳信标固定在小船上
3.3 试验结论
试验中试验小船运动(即声纳信标运动)后,从显控画面可以一直跟踪目标,并成功的显示目标方位、距离、经纬度,以下是显控记录的目标在不同距离(R)和不同深度(H)上的信息截图,画面右侧显示目标方位、距离、经纬度(如图11、图12所示)。
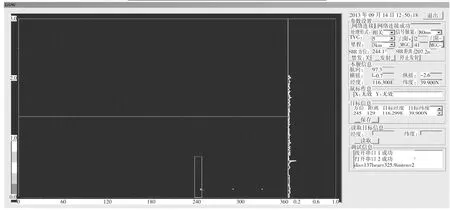
图11 (H=15m,R=300m)

图12 (H=40m,R=2000m)
通过试验验证了该装置的各项性能指标,而且易于操作,满足在3 km距离上,水下信标发射到达侦测声纳时,测距精度误差小于55 m的精度要求,同时满足在3 km距离上,测向精度误差小于2.5°的精度要求,且距离目标越近,精度越高信号越强。此外,对于超短基线定位系统,通常可能接收到的信号主要由超短基线定位系统应答器信号、海洋环境噪声、舰船自噪声、其它舰船的辐射噪声等组成。其中应答器信号是要检测的信号,其余都构成了掩盖信号的背景干扰,它们干扰了系统正常工作,限制装备性能的发挥,所以在排除噪音干扰方面需要进一步研究。