用于X射线准直光阑的固定链传动机构设计
2018-12-24陈玉梅
陈玉梅
(同方威视技术股份有限公司,北京100084)
0 引言
通常情况下,链传动用于传递两轴相距较远的转动。与带传动相比,能够保持准确的平均传动比[1]。链传动可用于重载、条件恶劣的工况下,因此在工业、农业等诸多领域应用广泛。目前,根据不同用途,不同规格的链条、链轮已成标准化、系列化的产品,在市场上可以方便的购买。所以,在原有其他传动形式,比如下文介绍的准直光阑的传动中,如果采用链传动,产品在简化结构传动链、缩短工期、降低加工难度、节省制造成本、简化控制方式会有不同程度的提升。
工业、医疗等行业中,直线加速器作为X射线源应用越来越广泛。而加速器X射线的照射野准直光阑是必不可少的组成部分。无论是医疗放射治疗、工业射线无损检测,都需要调整射线的照射野。
准直光阑位于作为射线源的加速器前部,两对光阑块,相互垂直。光阑块选用钨合金、铅合金等重金属材料制造。两对准直光阑工作面在空间形成四棱锥体,将射线束限制成矩形的照射区域(野)[2],如图1所示。直线加速器的照射野进行调整时,准直光阑块以靶点为中心转动,如图2所示,靠近射线野一侧与靶点(射线源点)在同一平面(延伸面)上,以使照射野避免出现半影。
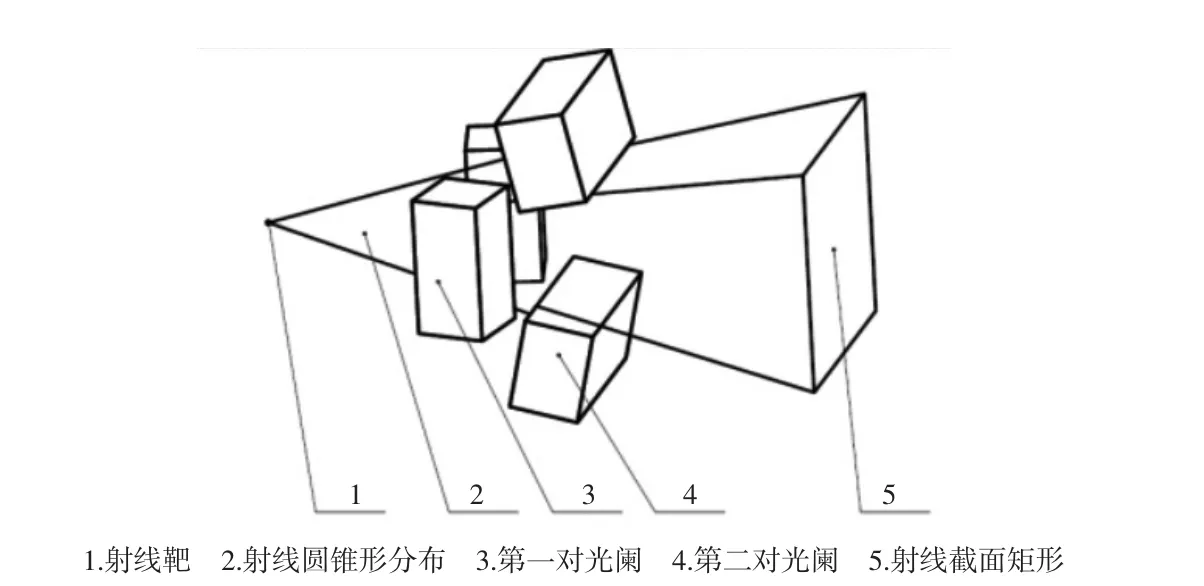
图1 射线野
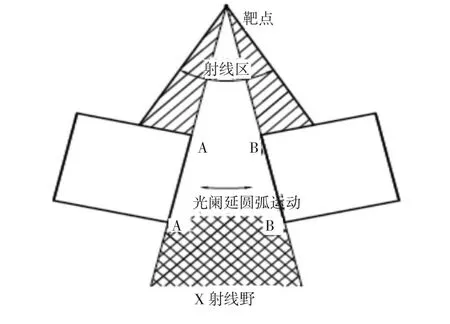
图2 光阑运动轨迹
目前应用较多的传动方式是滚珠丝杠传动,直线轴承导向。这种方式一般通过直线拖动射线调整块的同时调整块自身沿圆弧作一定角度的转动,书[2]中的介绍是目前产品中采用的结构。调整块的转动角度函数关系比较复杂,控制不方便。滑槽结构的间隙使得运动精度提高存在困难。
为此,本文结合链传动的特点,将准直光阑的拖动系统改为链传动,并设法消除了往返运动间隙。
1 固定链传动结构原理
采用的固定链传动机构,是链条固定,链轮随被拖动的元件(准直光阑块),以实现射线准直光阑按照既定轨迹运动。
整套机构分成如下几个部分:
(1)准直光阑块,两对。如图3所示,每个光阑块两端面上安装有滚轮,用于导向;链轮及传动轴组件,传递运动,驱动光阑块;支撑滚珠机构,防止光阑块沿长度方向窜动。整个光阑块两端面安装元件相同并对称安装。此外,传动轴两侧分别安装驱动电机以及运动反馈元件(旋转编码器),见图4所示。
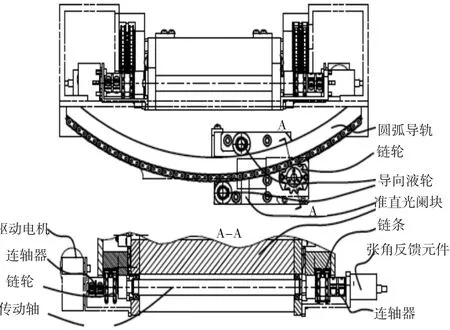
图3 传动原理
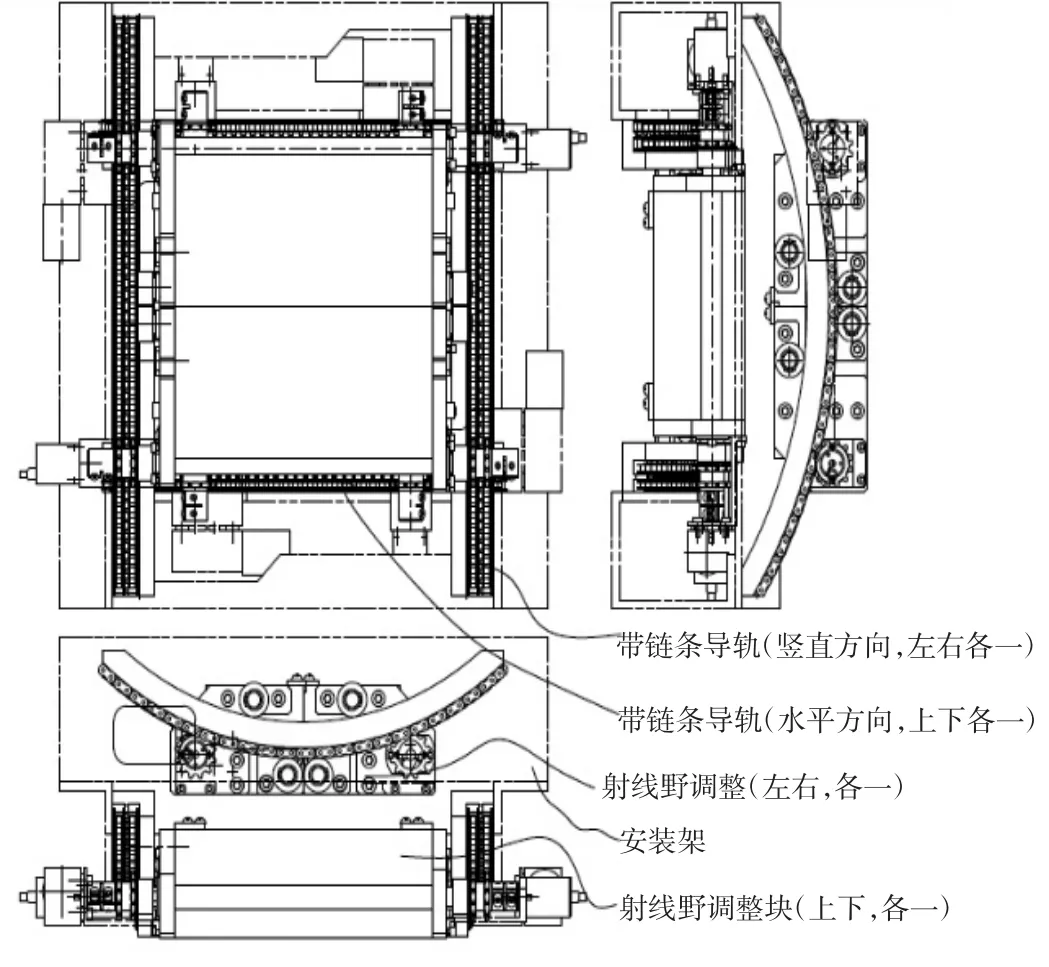
图4 整体结构机构原始(闭合)位置
(2)导轨组件,即圆弧导轨以及固定在圆弧上的链条。圆弧导轨的圆心轴线经过靶点。链条固定在圆弧外侧,确保与外侧面贴实并固定。
为消除啮合间隙误差,采用双排链传动,两链条互相独立,沿圆周方向可单独微量调节。这样,相邻两链条可有一个微小的相位差。这个相位差可以根据需要调整,目的是消除链轮与链条正反向运动间隙。
导轨组件成对安装,侧面分别与光阑准直块端面的滚轮、链轮配合。而导轨的两个平端面,一面与机架连接,一面光阑准直块端面的支撑滚珠接触。
(3)必要的支撑和外连接机构。这里包括机架,必要的电控元件以及其他辅助元件。
图3显示了上述各组件的装配关系。
整个机构如图4所示,调整块两块为一对,相向运动,两对调整块分成两层,垂直布置。
2 张角分析
准直光阑是用来调整射线矩形野的大小的,也就是光阑块工作面从正中心位置转过的角度,即光阑张角,是准直光阑的控制指标。
由于没有相关计算,参照齿轮轮系传动计算[3]来确定张角。
下面以其中一块准直光阑为例,分析一下张角计算。
准直光阑块沿导轨绕靶点O以转速ωH转过角度φ,根据相对运动原理[2],固定链和标定块加上一个角速度“-ωH”后,系统变成链轮轴固定的传动方式,如图5.

图5 转角计算
转化后的传动比:

式中,m为外啮合的次数,此处m=1.圆弧轨道固定,所以固定链ω2=0,链轮转速ω1,那么

上式对时间积分,可得

式中,r1为链轮分度圆半径,r2=R弧+d链/2

根据(2)式,显而易见地有:
1)光阑块转动角度与驱动链轮转动角度成正比,控制会相比于书[2]中介绍的丝杠传动要简单。
2)链轮转过相同角度,圆弧半径越大,光阑块转过的角度越小;而链轮分度圆半径越大,光阑块转过的角度越大。
根据(4)式,可以计算出准直光阑块转角与驱动链轮转速的关系,从而实现对光阑张角的实时控制。
3 动载荷控制
由于链传动不能保持恒定的瞬时传动比,使得上述分析中,所使用的传动比i选用平均传动比,而光阑块角速度ωH亦是平均角速度。以下分析光阑块瞬时变化以及这一变化引起的载荷变化。
为更清楚地表示出链节长度与节圆位置关系,图6为无比例绘制。
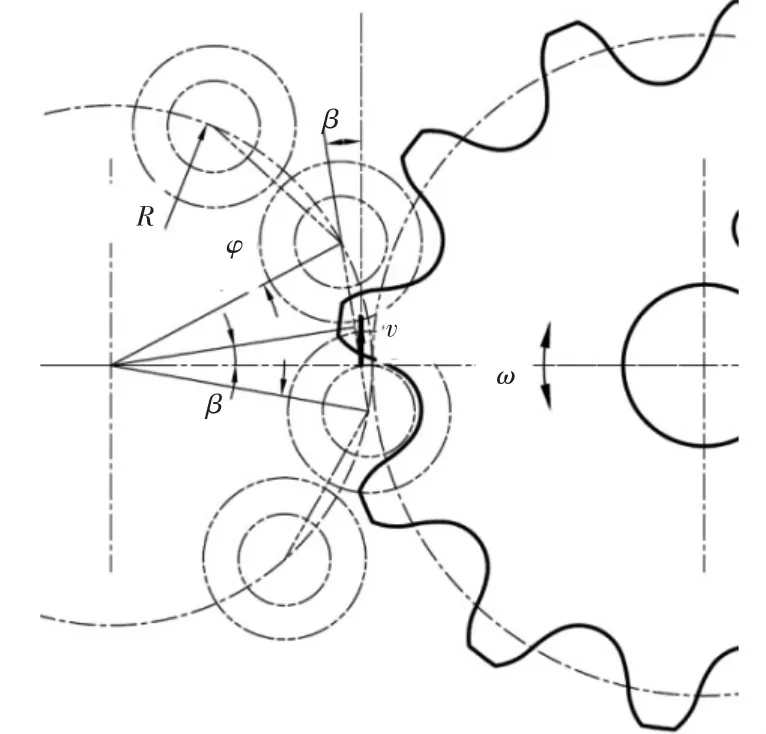
图6 瞬时角速度
上面谈到,固定链和标定块加上一个角速度“-ωH”后,系统变成链轮轴固定的传动方式,这时:
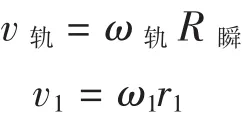
在上图中:v=v1=v轨
那么
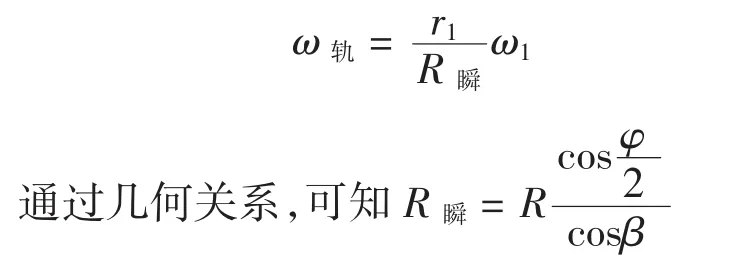
图6中的R即是图5中的r2,亦即

由于轨道固定,所以光阑块转动
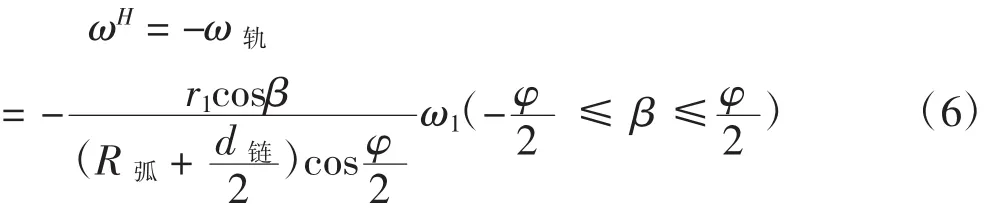
光阑块动载荷
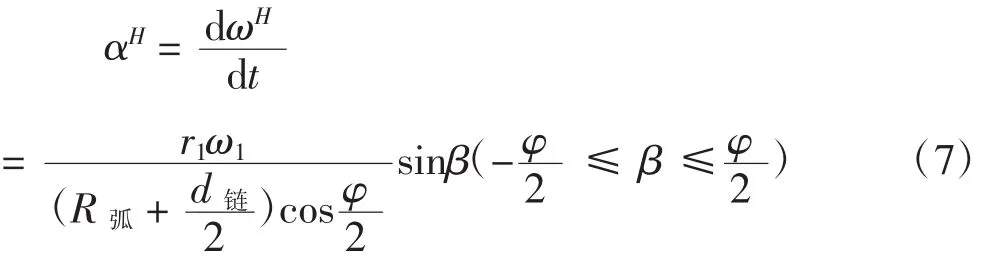
从上述(7)式中可以看出,在设计过程中,根据实际需要从减小链节距、增大轨迹曲率半径,增大驱动链轮分度圆半径都可以不同程度的减小光阑块的动载荷,使得运动更趋平稳。
以图5中的光阑参数为例,链节距p=6.35 mm,R弧=204.2 mm,d链=6,r1=24.5 mm,

链轮转速n=45 rpm,光阑块的角速度和角加速度变化则如图7所示。
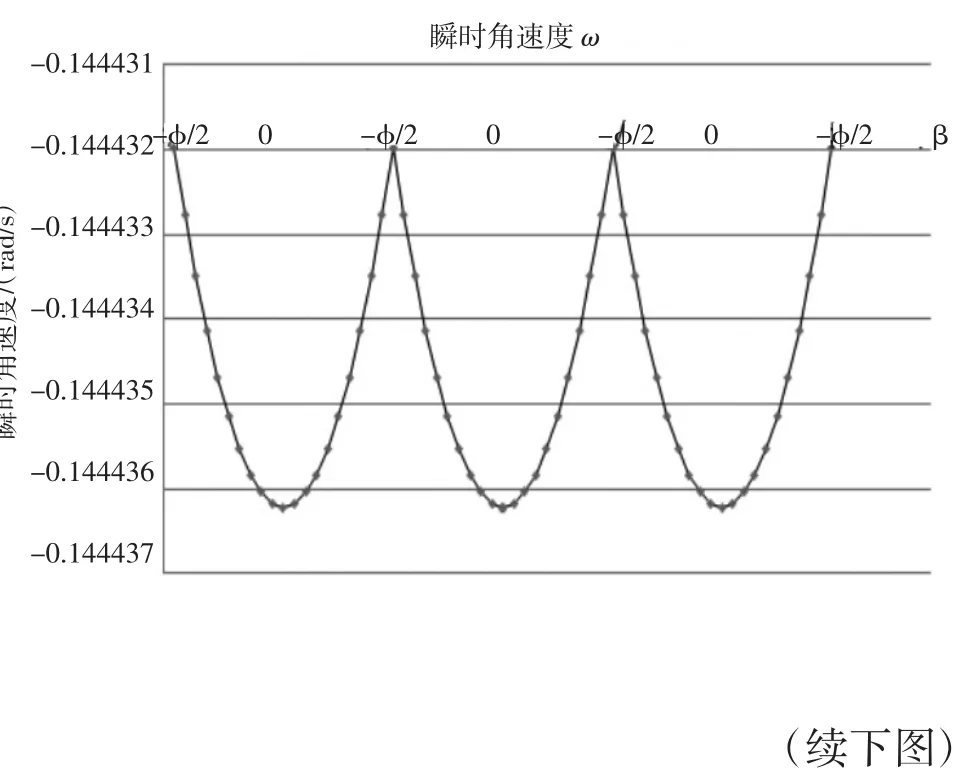
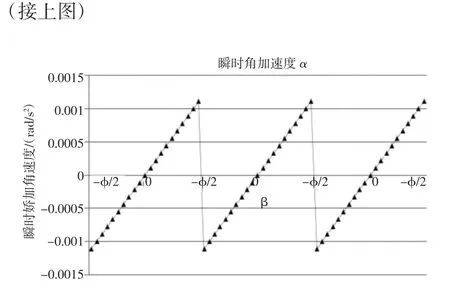
图7 光阑块转速变化
经计算可知,在上述参数条件下,光阑块角速度和角加速度变化幅度为:
通过上述分析可知,由链传动引起的速度和载荷变化很小,光阑块可以平稳运动。
4 结论
根据上述介绍的思路,设计了固定链传动的直线加速器射线准直光阑。固定链传动光阑与原有准直光阑相比,结构更加紧凑,重量有所降低,控制方便。最重要的,工期缩短,成本降低。
图8展示了设计结构和安装在直线电子加速器上的准直光阑。
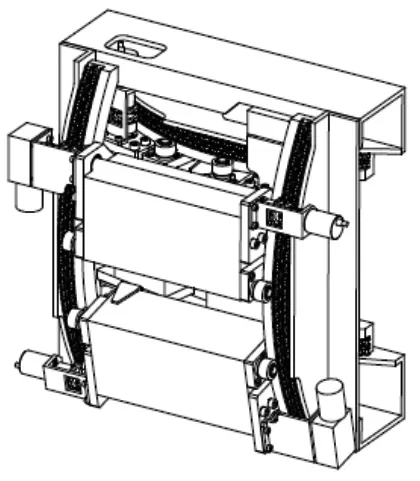
图8 准直光阑