PLC配料称重系统的模糊自适应控制*
2018-12-05刘文秀
刘文秀, 郭 伟
(1. 韶关学院 物理与机电工程学院, 广东 韶关 512005; 2. 广东松山职业技术学院 电气工程系, 广东 韶关 512126)
根据我国建筑规范要求,在工业混凝土搅拌物料的过程中,应严格按照配比对水、水泥、沙子、石灰等进行搅拌.在对物料的称重过程中,实现对物料的高精度动态称重,才能够有效提高生产效率.而这种高精度动态称重系统是一种强干扰、非线性、大滞后的系统[1],因此,目前先进的控制理论技术在称重系统中应用得越来越多.其中,模糊自适应控制算法对参数变化和环境变化不敏感,对非线性和多变量的复杂对象的控制能够达到收敛速度快和鲁棒性能好的效果,且在运行过程中能够通过修正自己的控制规则改善控制性能[2].本文基于李雅普诺夫稳定性理论,设计了称重系统的模糊控制器,并实现了参数自适应律,通过构造李雅普诺夫函数,证明了在此自适应模糊控制器下系统是稳定的[3].将PLC控制器与称重实物平台连接完成后,用VB语言实现自适应模糊控制算法,并进行实物实验.结果表明,PLC控制器能够满足控制平台的要求,所设计的自适应模糊控制方法具有良好的动态性能和稳态精度[4-5].
1 称重控制原理
系统硬件原理框图如图1所示.系统采用上位机和下位机相结合的控制方式.上位机采用VB开发控制软件,采用PROFITBUS技术实现与PLC的实时通讯.下位机采用西门子s7-200系列PLC中的CPU226,有40个I/O口,24个数字量输入口,16个数字量输出口.称重传感器采集的重量模拟信号通过模拟量模块EM235传送给PLC,从而可以利用上位机通过控制算法计算出控制量,对执行机构进行控制,实现物料的称重.

图1 系统硬件原理框图Fig.1 Principle diagram of system hardware
2 系统模糊自适应控制算法的设计
2.1 系统描述
考虑实际系统的数学模型为
(1)
式中:f为未知函数;b为未知的正常数向量;u为反馈控制器的输出.
利用IF-THEN模糊规则表描述控制知识,实现自适应模糊控制算法,其基本原理是将跟踪偏差和偏差变化率作为模糊规则的输入量,模糊规则的输出作为系统控制的输入量[6].设位置指令为ym,令
(2)
可以选择合理的K参数,使系统闭环传递函数的极点在S平面的左半平面上.设计控制率为
(3)
通过K的选取,当t→∞时,e(t)→0,即系统的输出y渐进地收敛于理想输出ym.
本文基于模糊系统设计了一个反馈控制器u=uD(x|θ)(u为式(1)中的变量,uD为一个模糊系统,θ为一个调整参数向量),使系统的输出y尽可能地跟踪理想输出ym,从而实现模糊自适应控制算法[7].
2.2 模糊自适应控制器设计
自适应模糊控制系统如图2所示.系统首先设计模糊控制器,其次设计自适应律[8].

图2 自适应模糊控制系统Fig.2 Adaptive fuzzy control system
2.2.1 模糊控制器的设计
模糊控制是智能控制算法的一种[9],是模仿人的思维处理过程的智能算法.根据经验构造模糊规则表,无需模型信息即可达到控制的效果,因此,这种控制算法对于不易建立数学模型的非线性、时变和滞后性系统能够实现良好的控制.
模糊系统uD的实现过程[10]如下:

2) 用IF-THEN模糊规则表来构造模糊系统u=uD(x|θ),即

THENuDissl1,l2,…,ln
采用乘积推理机、单值模糊器和中心平均解模糊器来设计模糊控制器.单值模糊器表达式为
(4)
乘积推理机表达式为
(5)
将式(4)代入式(5)可得
(6)
(7)

中心平均解模糊器表达式为
(8)
由此可得
(9)
2.2.2 自适应律的设计

e(n)=-KTe+b(u*-uD(x|θ))
(10)

(11)
取最优参数θ*=argmin[sup|uD(x|θ)-u*|],则最小逼近误差为ω=uD(x|θ)-u*,式(11)可写成
b(uD(x|θ*)-u*)
(12)
可以证明在李雅普诺夫的标量函数[11]下,存在正定矩阵Q>0,通过设计足够多规则的模糊系统uD(x|θ),可使误差充分减小,并满足系统稳定的条件.
3 系统控制器的实现



表1 变量尺度变换Tab.1 Transformation of variable scale
隶属度函数波形如图3所示.
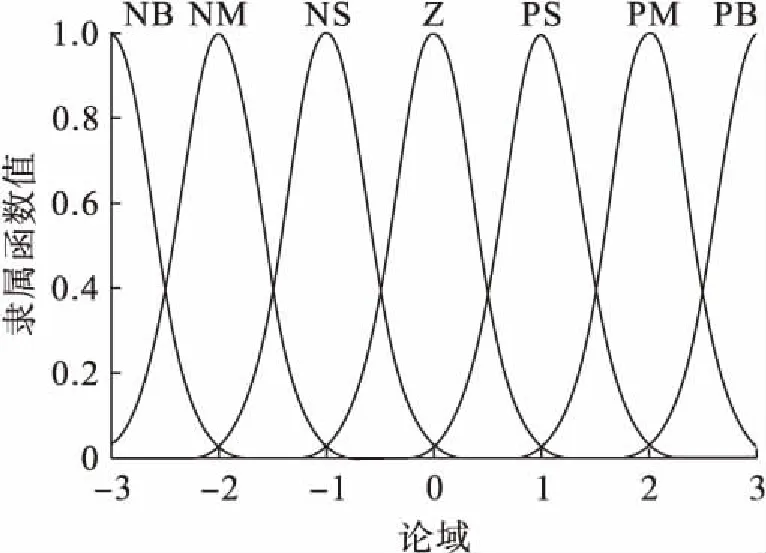
图3 隶属度函数波形Fig.3 Waveform of membership function
Ruleij:IFe=μiand Δe=μjTHENu=uij
利用乘积推理机,规则前部分的隶属函数为fij=μi(e)μj(Δe),其中,μi(e)和μj(Δe)分别为e和Δe的隶属度.从表2中可以看出,模糊规则共有49条,每条规则都可以利用一个模糊关系来描述.
根据实际被控对象和指令信号,设计系统控制规则表(见表3).
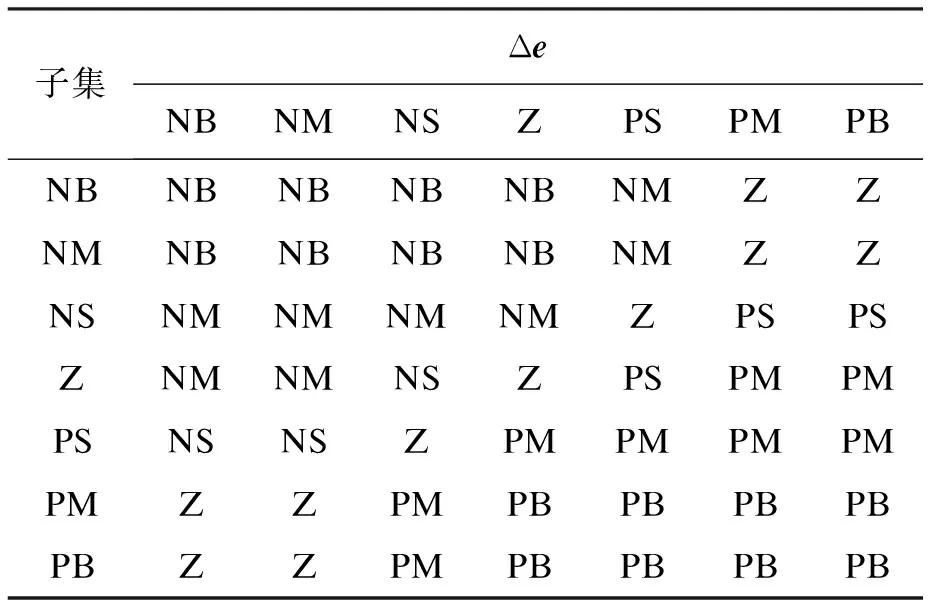
表2 模糊规则Tab.2 Fuzzy rule

表3 控制规则Tab.3 Control rule

4 MATLAB仿真
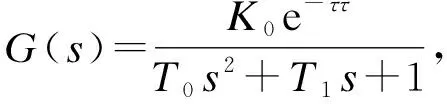

图4 Simulink下系统仿真模型Fig.4 Simulation model for system under Simulink
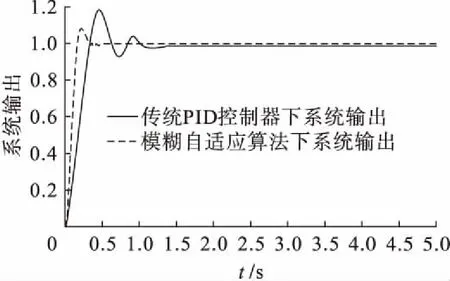
图5 阶跃响应曲线Fig.5 Step response curves
5 实验验证


图6 配料称重实验箱Fig.6 Batching weighing test box
6 结 论
实验室所搭建的PLC控制系统硬件配置成本相对较低,应用到实际的企业中可以降低成本,提高经济效益.通过调试,系统能够稳定可靠地运行,提高了配料的效率,降低了人工配料过程中对配料人员的伤害,并且能够达到工艺要求.采用模糊规则表的自适应模糊控制算法,提高了整个控制系统的响应速度和配料精度,系统具有稳定、可靠、抗干扰能力强的特点,达到了预期的控制目的.

图7 系统软件工作界面Fig.7 Operation interface of system software

图8 系统排料控制界面Fig.8 Control interface of system discharging
