基于VAV变风量智能建筑空调系统控制*
2018-12-05李顺群
李 伟, 李顺群
(1. 新乡学院 基建处, 河南 新乡 453003; 2. 天津城建大学 土木工程学院, 天津 300384)
供热通风与空气调节(heating,ventilation and air conditioning,HVAC)系统旨在为用户提供舒适有效的工作环境,已广泛应用于工业和公共建筑,然而其能耗占据建筑能耗的比重达到70%,因此,空调系统节能与控制方面的研究对节约社会能源至关重要.变风量(variable air volume,VAV)空调系统[1]在舒适性和节能性方面表现突出,近几年得到各方面关注[2].VAV系统可以根据负荷变化和室内空气参数的变化自动调节空调系统的空气量,以满足室内舒适度或生产过程的要求.调节风量可以最大限度地减少风扇功率,从而节省能源消耗[3-4].但VAV系统非常复杂,需要完成室温、湿度、新鲜空气和风量的匹配控制,许多因素可能导致负载变化和时变干扰,传统PID控制方法难以处理大时间延迟及VAV空调系统的非线性特性问题.由于模糊PID控制方法不需要高精度数学模型,如今已逐渐用于各种工业过程[5-6],模糊控制方法与传统PID控制在空调系统中的结合也成为制冷和空调领域的重要研究方向.
1 模糊PID控制机制
1.1 VAV空调系统控制原理
VAV空调系统通过调节风量以达到室温在一定范围内的调节,通常采用调节末端送风阀或送风机转速来实现[7-8].本文采用前者来控制送风量,其控制原理图如图1所示,图中T为空调,D为送风阀,L为送风机.
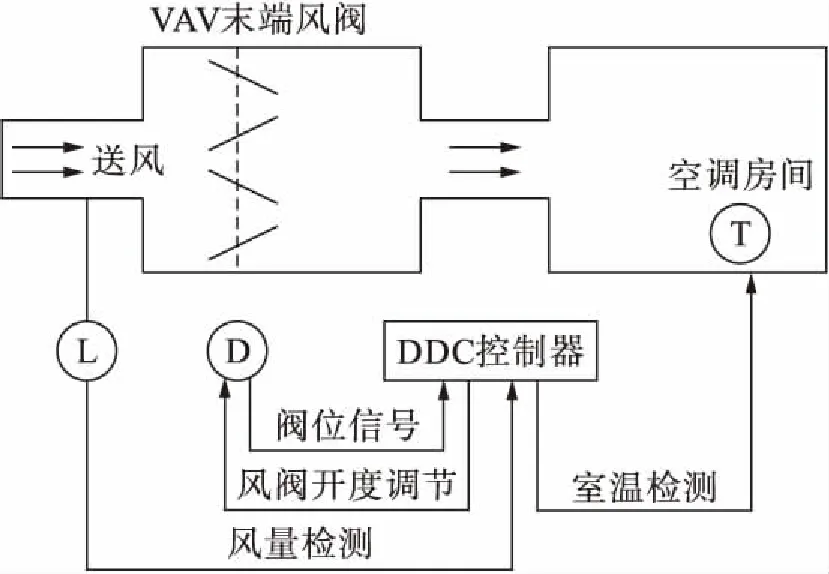
图1 VAV空调风量控制原理图Fig.1 Control principle of VAV air conditioning flow
1.2 VAV空调系统模型
VAV系统室内温度控制图如图2所示.首先通过传感器检测室温,并将其传送给调节器,通过与预设温度值对比得到温度偏差,然后由调节器处理偏差,结果传输到执行器控制被控对象.

图2 VAV系统控制图Fig.2 Control diagram of VAV system
1.3 风阀数学模型与空调模型
本系统的执行机构是末端风阀,其数学模型表达式为
(1)
式中:C为风阀行程;Ci为控制信号;τ为最大控制信号作用下风阀行程到满行程时间的二分之一.
一般认为VAV空调系统的数学模型是初级指令加上一定的时间延迟,因此,VAV空调通常采用具有传递滞后的一阶模型.实验和仿真结果也表明,使用一阶模型加传递滞后的模型可以满足实际应用中空调系统的需求.本文VAV空调系统数学模型的温度控制函数可表示为
(2)
式中:τ1为空调系统传递滞后时间;T1为时间常数;K1为放大系数.
三个参数的估算方法同文献[9].本文空调房体积为4 m×5 m×3 m,换气次数N为15次/h,则有
τ1=9/N=0.6 h
(3)
T1=90/N=6 h
(4)
0.175
(5)
室温调节对象的具体传递函数为
(6)
1.4 模糊PID控制系统
模糊PID功能框图如图3所示.模糊PID控制方法是由PID控制和模糊推理两部分组成,当温度偏差对于动态性能响应较好时采用模糊推理;相反,则采用PID控制以获得良好的静态性能和精度.模糊PID控制方法可实现两者的优势互补,比单一的PID控制或模糊推理具有更好的性能.

图3 模糊PID功能图Fig.3 Function diagram of fuzzy PID
安装在空调室内的温度传感器可以将温度信号传递给模糊PID控制器,根据室内温度和设定值的偏差可以获得控制误差和控制误差差异,然后控制动作执行器,进而控制空气阀.当空调房的负荷变化时,模糊PID控制器不仅可以快速满足控制响应,还可以使用模糊规则实现PID参数在线调整,提高VAV空调控制系统的鲁棒性和抗干扰能力.
2 模糊PID控制器规则
传统的PID控制器参数设置策略可分为手动调节、自整定和自适应调节三种,手动调节方法需要花费更多的时间,精度不高;自适应调节方法可以根据运行时系统负载的变化自动调整参数,具有较强的适应能力[10].模糊PID控制器使用室温值偏差(e)及其导数(ec)作为控制器输入,然后获得PID相应参数的增量Δkp、Δki和Δkd,从而PID参数也可以相应地改变,PID自校对过程如图4所示.
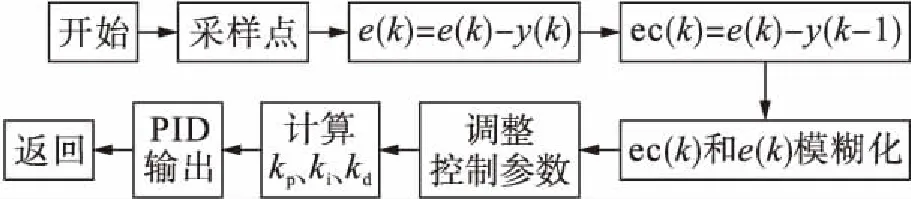
图4 模糊PID在线校准过程Fig.4 On-line correction process of fuzzy PID
将系统误差和误差变化率的范围定义为模糊集的域,输入变量和输出变量的模糊子集设置为7个级别(NB,NM,NS,ZO,PS,PM,PB},即{负大,负中,负小,零,正小,正中,正大}.PID动态参数变化表达式为
(7)
本文选择了“if-then”形式的模糊控制规则,具有2个输入变量,3个输出变量,总共7个级别的模糊子集和49个模糊规则[11-12].输出变量的模糊控制规则如表1~3所示.

表1 Δkp模糊控制规则Tab.1 Fuzzy control rules of Δkp

表2 Δki模糊控制规则Tab.2 Fuzzy control rules of Δki
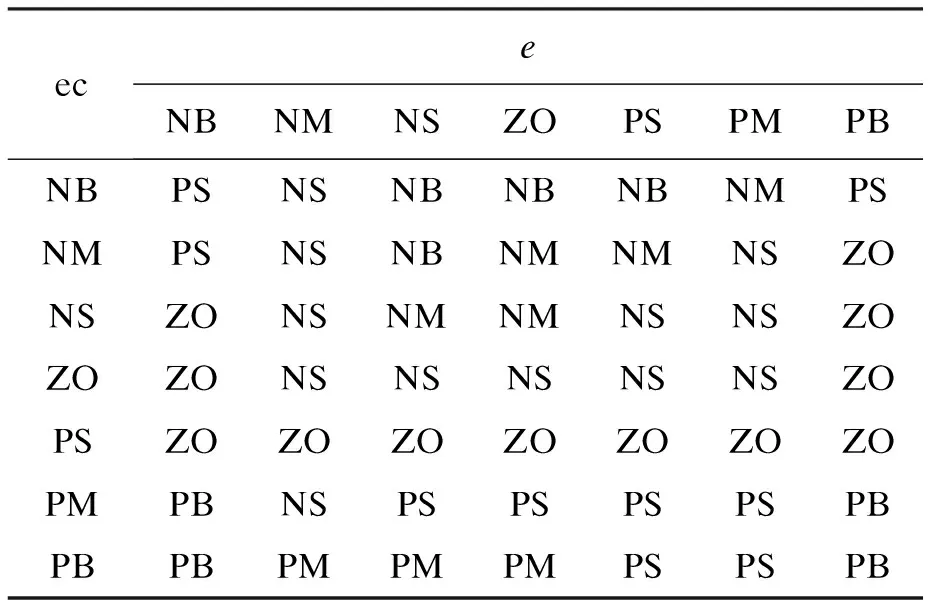
表3 Δkd模糊控制规则Tab.3 Fuzzy control rules of Δkd
3 仿真结果分析
使用Matlab的Simulink工具建立仿真模型,并将传统PID控制方法和模糊PID控制方法进行比较,对温度变化进行评估.根据实际情况,设置采样时间为20 s,当输入信号为阶跃信号时,取比例系数kp为0.6,积分系数ki为0.004 5,微分系数kd为2.25,通过两种方法将温度由25 ℃升到40 ℃,仿真结果图5所示.
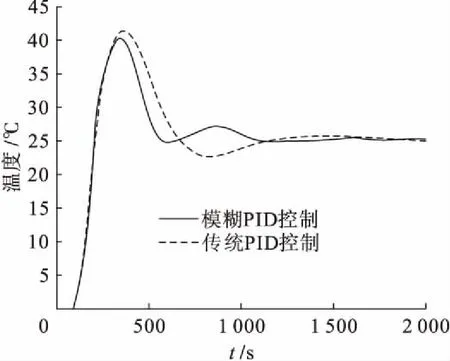
图5 不同控制方式下的温度响应曲线Fig.5 Temperature response curves under different control modes
由图5可以看出,本文提出的模糊PID控制算法相比传统PID具有动态响应快,校正时间短、超调量小的优势.在干扰或模型不匹配的情况下,它比传统的PID控制算法在超调量、校正时间、抗干扰和鲁棒性等方面的性能更好.
图6为不同控制方式下的风机运行转速曲线.风机稳态转速为620 r/min,传统控制方法的风机响应速度较慢,且响应峰值较高;采用模糊控制方法的转速整体数值均低于传统控制方法,并且能够在很短时间内使得风机转速达到稳定,偏差值较小.

图6 不同控制方式下的风机转速曲线Fig.6 Curves for rotated speed of fan under different control modes
图7为送风量与温度误差变化曲线.由图7可以看出:传统控制方法在均匀调整送风量时,温度误差波动剧烈,而且达到设定温度(25 ℃)需要较长的调整时间;而改进后的模糊PID控制方式能够在短时间内使得温度调整到稳定值,且波动较小.送风量直接关联着温度调整过程的能量消耗,因此,从能耗方面考虑,调整时间用时越短,能耗越小.由于模糊PID控制方式响应时间短,而且超调量小,只需要很少的送风量就能满足调整温度负荷的目的,因此,模糊PID控制方法能够在一定范围内降低能耗.
4 结 论
VAV空调系统是一种能够满足节能和舒适要求的通用空调系统,其非线性、延时性等特点使得传统PID控制方法难以保证控制其控制精度与运行的稳定性.本文建立了模糊PID控制算法对VAV室内温度进行控制,所提出的算法非常适合大惯量、纯时间延迟、非线性VAV温度控制系统.仿真结果表明,模糊PID控制器在动态响应、稳定性和节能等方面比传统PID控制器性能更好,本文研究对室内VAV系统温度控制调节具有一定借鉴价值.

图7 送风量与温度误差变化曲线Fig.7 Variation curve of air volume and temperature error
