风电机组变桨鲁棒控制*
2018-12-05卢奭瑄佟维妍
卢奭瑄, 付 思, 佟维妍
(沈阳工业大学 化工过程自动化学院, 辽宁 辽阳 111003)
风能作为一种清洁的可再生能源,在世界能源环境问题越发严重的今天进一步得到了人们的关注和认可.风力发电是风能利用的有效方式之一,然而,由于风场内风速的随机性变化,给风电机组的控制带来了很大的困难[1-2].从风电机组风能捕获的控制角度分析,目前功率调节方式主要分为定桨距失速控制和变桨距控制两种方式.随着兆瓦级大容量风电机组的飞速发展,变桨距控制方式已经成为风电机组最主要的控制方式.变桨距控制由变桨执行机构根据风速变化调整叶片的桨距角,从而控制风电机组的转速,保证风电机组在高风速区保持稳定的输出功率[3].

本文通过对风电机组模型的分析,设计了一种桨距角鲁棒控制器.基于定量反馈设计方法,使风电机组模型中控制器输出信号跟踪预设参考给定值,能快速响应风速的变化,使得系统转速更加平稳.
1 风电机组能量传动模型
风电机组是一个复杂的非线性系统,其能量转换过程包括:风轮的风能捕获、机械系统的转矩传递及发电机将机械能转化为电能.图1为变速变桨距风力发电系统结构示意图.

图1 变速变桨距风力发电系统结构示意图Fig.1 Schematic structure of wind generation system with variable-speed and variable-pitch
传动系统由多个惯性组件、弹性组件及阻尼组件构成,因为系统机械部分刚性轴的扭转刚度较大,所以低速轴与高速轴间是刚性的,转子和发电机为相同的旋转自由度,传动轴转速按齿轮箱变比调节.
风电机组转换功率取决于风轮从空气中捕获的能量,风轮获得的转矩及机械功率分别为
Tv=0.5ρACp(λ,β)V3/ω
(1)
P=0.5ρACp(λ,β)V3
(2)
式中:Tv为气动转矩;ρ为空气密度;A为桨叶扫掠面积;Cp为风电机组的风能利用系数;λ为叶尖速比;β为桨距角;ω为风电机组主轴转速;P为风电机组机械功率;V为风速.
在风轮捕获风能模型中,使用风能利用系数Cp来描述风电机组对风能的利用率,可以看作桨距角β和叶尖速比λ的非线性函数关系[3],经过拟合计算后其关系可表示为
(3)
由式(3)可以看出,为保持风电机组在高风速区转速稳定在额定转速ω0,通常采用调节其桨距角β并降低风能利用系数Cp的方法.
风电机组系统模型中若忽略传动轴刚度系数、齿轮箱惯性损失和机械传动过程中阻尼系数等因素影响,传动系统数学模型可以表示为
(4)
式中:Jg为发电机转动惯量;Jr为风轮转动惯量;N为齿轮箱变速比值;Te为发电机转矩;Tact为变桨执行机构传递函数,用来描述叶片的桨距角β和给定值βc之间的关系.
风电机组的变桨控制主要在高风速区起作用,控制器通过调节叶片的桨距角控制风轮转速,保证系统输出的机械功率稳定.鉴于风电机组传动模型的强非线性,为降低控制难度,变桨距控制器一般基于风电机组线性化模型设计,线性化过程中稳定点选取在额定风速状态.由于气动转矩Tv是可微的,在稳定点处对其线性化可以得到转矩的线性关系式为
(5)
(6)
(7)
(8)
式中,γ为风速与风力机水平轴方向夹角.由式(1)、(2)整理得到风电机组传动系统线性化关系为
E(s)(β(s)a+V(s)b)
(9)
双馈发电机励磁控制数学模型中,定子微分方程为
(10)
(11)
转子微分方程为
(12)
(13)
式中:u、R、i、ε为发电机绕组电压、电阻、电流、磁链;下标s、r为定子量和转子量;下标d、q为两相旋转绕组的旋转轴方向.
双馈发电机目前多采用矢量控制,其电磁转矩方程为
(14)
式中:Lm为定子等效两相绕组的自感;Lr为转子等效两相绕组的自感.
变桨距执行机构主要通过驱动变桨电机将叶片旋转到特定的角度,所以变桨控制过程可以被视为二阶延时动态模型,即
(15)
式中:Ω为带宽;ζ为阻尼因子.
2 桨距角鲁棒控制器设计
当风电机组运行状态偏离其稳定点时,普通的PID控制器性能会显著下降,甚至引起传动系统输出功率的不稳定.而大部分基于现代控制理论设计的桨距角控制器虽然在实际非线性模型上可以得到验证,但其实现难度较大.
风电机组的变桨控制主要目标之一是在高风速区控制其输出转速稳定在给定转速值,并且需要考虑系统传动模型的非线性、发电机转矩变化及风速检测信号偏差等扰动因素.
定量反馈理论是一种鲁棒控制器设计理论,它将系统中各种不确定参数取值范围和预设的输出特性值以量化给定的形式在Nichols图上设置成边界条件,并根据预期参考目标,在开环特性曲线条件内确定需要满足的边界条件区间.通过在特性曲线上对相应参量的选择,以图形量化的形式对系统性能进行设定,并计算出可以满足期望性能指标的鲁棒控制器[7-8].
由风电机组模型可以看出,在高风速工况下,风速扰动会引起风电机组转速波动.对于这一问题,可采用定量参数调节的方法,通过对桨距角的调节来实现对系统转速的稳定控制.变桨控制器设计采用如图2所示的结构,其中,G(s)为风电机组的桨距角控制器,用以抑制扰动风速;M(s)为描述变桨执行结构工作过程的传递函数;E(s)为具有参数不确定性的系统描述传递函数.

图2 线性系统定量反馈控制器Fig.2 Quantitative feedback controller of linear system
2.1 定量反馈控制器设计
在扰动风速的作用下,控制风电机组转速稳定是定量反馈变桨控制器的主要设计目的.风电机组传动模型为高阶非线性模型,其中随机风速扰动输入值范围、低速传动轴转速稳定性、控制器调节响应速度和稳定性等因素都会影响设计目标,可以通过分析这些因素,在Nichols图上确定控制目标的范围条件.由于定量反馈理论是频域设计方法,因此,要求将过程中时域特性跟踪曲线转换到对应的频域曲线图形中.设定范围适合可以使风电机组传动模型控制器输出不受参数不确定性影响,同时鲁棒稳定性设置可以保证传动模型闭环系统的输出稳定.式(4)确定了系统鲁棒性稳定输出范围.
频域分析过程中,通常根据具体频域点取值不同计算出相应的取值范围,并设置出一系列不确定点的频域响应区间,给出相应的对象模板和限制条件,计算出这些点所在位置不确定对象的频率响应集合.在Nichols图上沿垂直、水平轴方向移动对象模板,调节对象取值范围,可以得到系统开环传递函数的取值边界曲线,并且满足风电机组传动系统闭环响应频率要求.
通过在Nichols图上对系统的开环频域回路整形,调节其相应开环频域响应满足边界要求,计算出桨距角控制器.根据定量反馈理论设计特点,计算得到的控制器在满足系统频域规范要求的同时,还可以依据实际结果适当调整控制器相应参数取值.
2.2 系统控制指标
在风电机组系统模型线性化处理过程中,模型包含两种不确定扰动影响因素:随机输入风速值V的不确定性及系统传动模型线性化转换过程中过渡增益值a、b和c的不确定性.设计中选择的系统线性化点为额定风速作用下,风电机组模型在额定转速时的工作点.
对于风电机组系统的桨距角控制器,需要考虑其抗风速扰动情况和系统鲁棒稳定性.具体性能指标如下:
1) 系统稳定裕度指标表达式为
(16)
为了保证闭环系统的稳定性,其选取的稳定裕度取值为:最小相角54°,最小幅值裕度5.5 dB.
2) 扰动抑制指标表达式为
(17)
3) 系统抗干扰性能指标表达式为
(18)
根据设计的扰动抑制指标,在MATLAB计算结果中确定边界范围,并在Nichols图上设计出系统的桨距角鲁棒控制器.风力机桨距角鲁棒控制器的抗干扰性能设计主要考虑输入扰动和增益变化对风电机组系统稳定性的影响.通过分析式(9)中输入风速的随机变化作用,风力机转速稳定性要求和跟踪要求等,可以确定控制器设计目标,并在幅相特性曲线上定量设置上、下边界.不论风电机组参数在不确定的取值区间内如何变化,控制器鲁棒稳定性规范都能确保闭环系统的稳定性.
在具体设计过程中,系统频域特性由不同的频域点组成,通过计算对象频率响应可以得到对象模板以及限制条件.在幅相特性曲线上调整对象模板,使得系统闭环频率特性满足设计目标,再根据系统的闭环传递函数得到风电机组桨距角鲁棒控制器.
3 算例分析
采用某1.5 MW大型变桨控制的风电机组数据作为算例模型,其中主要参数取值为:叶片长度r=40.25 m;风场空气密度ρ=1.25 kg/m3;切入风速Va=3.5 m/s;切出风速Vb=25 m/s;额定风速VN=12.5 m/s;风电机组风轮转动惯量Jr=4.9×106kg·m2;风电机组额定转速ωe=17.5 r/min;齿轮箱近似变比N=104;高速轴(包括发电机)转动惯量Jg=107.87 kg·m2;高速轴额定转矩Te=9 000 N·m;发电机额定功率Pe=1.5 MW.在系统频率范围内选择关键频率序列为{0.05,0.1,0.3,0.6,1,10},依照各性能指标在MATLAB的定量反馈工具箱中进行设计,得到各种参数、条件约束下的性能边界.图3中曲线为系统稳定裕度指标拟合曲线,由于系统增益值改变不影响其幅相特性,所以在系统增益值变化时,水平(或者垂直)移动该曲线可作为定量反馈控制器回路的稳定性判据.
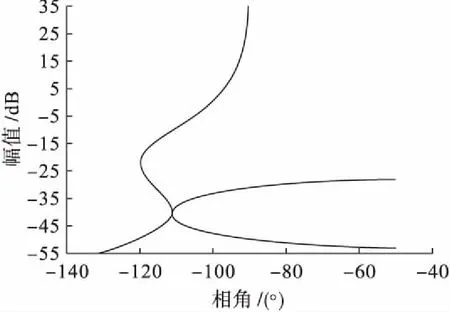
图3 整合边界的设计曲线Fig.3 Design curve of integrated boundary
通过反复仿真试验,根据图3计算出系统的定量反馈控制器表达式为
(19)
在满足风电机组传动模型要求的同时,还需要考虑变桨控制器设计的限制,准确的风速数学模型是评估变桨控制器性能的重要条件之一.风速动态模型可以反映风速动态随机变化过程,其由两个部分叠加而成,即
V(t)=Vc(t)+Vt(t)
(20)
式中:Vc(t)为相关地形气象条件下平均稳态风速值;Vt(t)为瞬时变化的湍流风速值.考虑风电机组风轮扫掠面不同时采样点风速的变化,有效风速模型需要体现平均风速模型和湍流两部分特点.
图4为对有效风速进行模拟的曲线.为准确验证设计的桨距角鲁棒控制器效果,仿真选取一段风轮处于高风速区的风速值进行模拟,其风速取值主要集中在12~26 m/s之间.
图5反映了风电机组系统在风速扰动作用下,经定量反馈控制的桨距角变化情况.结合图5可以看出,桨距角响应稳定跟随风速的变化,对作用在风电机组系统上的风速扰动进行了有效抑制.
图6为含定量反馈桨距角控制器的风电机组系统输出转速.测定区间内,风轮转速输出与额定转速相差不大,风轮转速基本在预定输出范围内.

图4 模拟风速信号Fig.4 Simulated wind speed signal
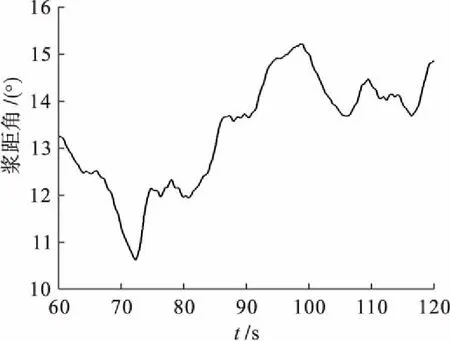
图5 桨距角响应曲线Fig.5 Response curve of pitch angle
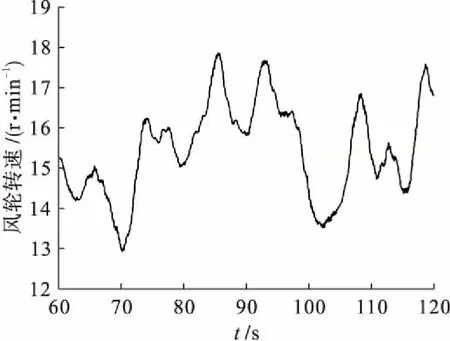
图6 风轮转速响应曲线Fig.6 Response curve of rotating speed for wind wheel
上述仿真结果表明,基于定量反馈理论设计的桨距角控制器在风电机组系统控制过程中可以有效消除随机风速扰动对系统输出的影响.
4 结 论
针对风能利用系数与桨叶尖速比、桨距角之间的复杂非线性关系,基于定量反馈理论设计出风电机组桨距角鲁棒控制器,以提高叶片在高风速区内的机组运行稳定性,减小同步误差.仿真结果表明:
1) 该控制器可以在高风速区实现风电机组的稳定控制,进而有助于提高系统输出功率的稳定性.
2) 由于采用扰动定量反馈,该控制器对风速扰动误差及风电机组转矩扰动不确定性具有较好的鲁棒性.
