基于船体三自由度井喷液柱高度测量方法*
2018-11-30刘书杰耿亚楠任美鹏胡乔波孙晓峰
刘书杰,耿亚楠,任美鹏,胡乔波,孙晓峰
(1.中海油研究总院有限责任公司,北京 100012;2.东北石油大学 高效钻井破岩技术国家工程研究室,黑龙江 大庆 163318)
0 引言
海洋石油资源[1]储量丰富,占全球石油资源总量的34%。随着海上油气勘探开发技术的发展,海洋油气产量稳步上升,已成为世界油气产量新的增长点。在海洋油气资源钻井过程中,由于地层压力掌握不准确、泥浆密度偏低、井内泥浆液位降低或起钻抽吸等原因,可导致钻井液压力小于地层油气压力,地层油气迅速侵入井筒,演变成不可控的井喷事故[2-3]。对于海洋钻井来说井喷失控是灾难性事故,由于远离陆地,很难迅速救援,井喷失控往往造成难以估计的经济和生态损失,如2010年墨西哥湾的深水地平线钻井平台井喷[4-5]爆炸沉没,历经83 d救援,泄漏的原油造成了墨西哥湾沿岸巨大的生态灾难。
海上钻井平台发生井喷事故后,需要第一时间获得井喷参数,如井口喷流压力、喷流流体性质等、根据井喷参数预测地层压力,制定压井方案。但当井喷失控后,为保障员工人身安全,需要工作人员立刻撤离海洋钻井平台,无法直接读取井口压力参数,此时平台井口井喷液柱高度是反应井口压力的可靠参数,可以依据井喷液柱高度计算井口压力[6]。井喷失控后,井喷液柱高度已经不能在平台上直接测量,通过救援船远程测量井喷液柱高度就成为可行的方法,但国内外文献中对这类测量方法却鲜有提及。目前,对于远程物体高度测量研究较多,一般有以下几种方法:刘劲彪、Teh等[7-8]提出激光电测法测量海上波浪高度;Bolanakis等[9]采用气压测量法测量物体海拔高度;Chulichkov、蒋李兵等[10-11]设计的图片像素法亦可以精确测量建筑物高度。上述测量方法中测量点是稳定的固定点,而救援船测量点受海洋环境影响是非稳定的测量点。
上述几种方法用于海上井喷高度测量弊端明显,一则器材昂贵不利于存放运输;再者受天气和环境干扰误差大,不符合现场实际应用。为解决恶劣环境下远距离井喷液柱高度测量问题,本文提出1种基于船体三自由度井喷液柱高度测量方法。该方法将难以直接测量的液柱高度转化为三倾角测量,应用三角函数变换,计算井喷液柱高度,然后对测量值进行卡尔曼滤波[12-13]处理,进一步提高测量精度。该方法克服了其他测量方法受环境影响大、误差严重的问题,
1 井喷液柱高度测量设备及测量方法
将难以直接测量的井喷液柱高度转化为三倾角测量,倾角测量将采用自设计的倾角测量装置,其结构如图1所示。这种倾角测量装置由望远镜、结构支架、镜片组、活动臂、角度测量传感器组成。镜片组包括高点观测镜、动镜及固定镜,其中,固定镜为半透明半反射的平面镜,动镜为凸透镜;高点观测镜与活动臂一端相连,置于结构支架顶端,可在1/6圆周内自由旋转;角度测量传感器镶嵌在活动臂上;固定镜与小型望远镜处于同一水平高度,全部组件按如图1所示的位置排列。
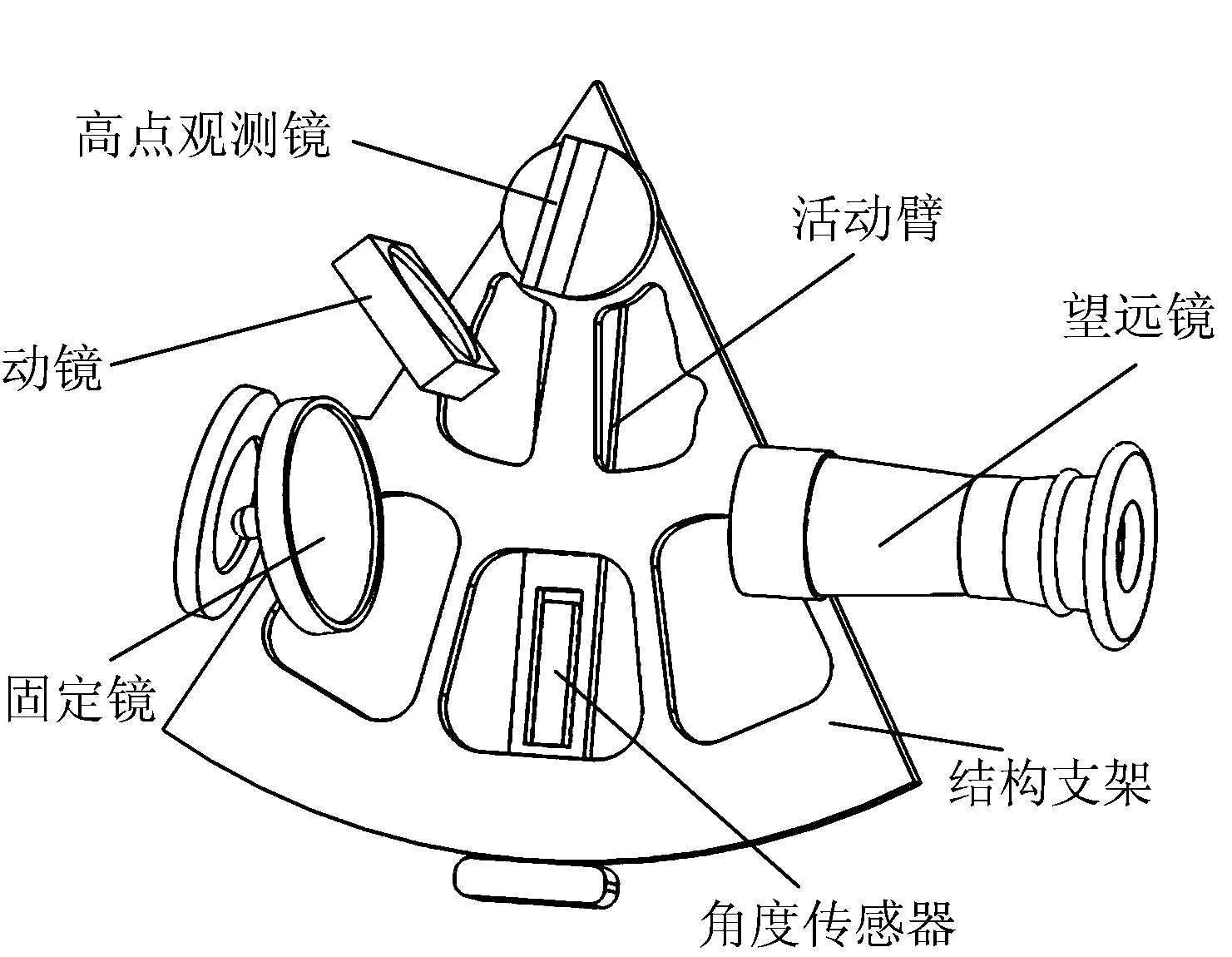
图1 倾角测量装置结构示意Fig.1 Schematic diagram of the inclination measuring device
倾角测量装置正常工作时,望远镜水平放置,对准井喷流体液柱,调节活动臂使高点观测镜对准井喷流体高点位置,转动固定镜使光线水平传入望远镜,记录角度传感器读数。倾角测量装置角度测量原理如图2所示。
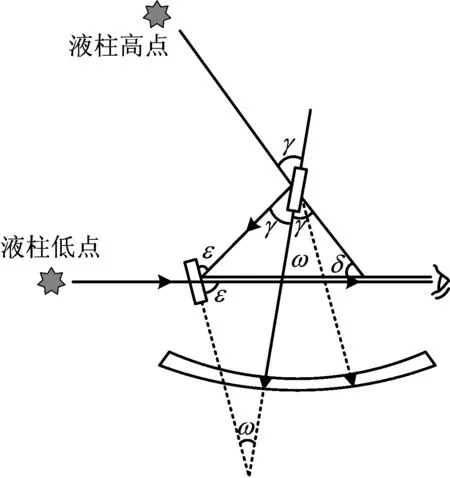
图2 角度测量仪器测量原理示意Fig.2 Angle measuring instrument measurement schematic
图2中,δ为液柱实际倾角,(°);ω为角度传感器示数。根据三角函数关系,在△DEG中存在角度变化规律为:
γ+(180°-ε)+ω=180°
(1)
同理,在三角形△ABO中亦存在以下角度关系:
2γ+(180°-2ε)+δ=180°
(2)
联立式(1)与式(2),求得:
δ=2ω
(3)
即测量示数为实际角度的一半,后文中,式(1)~(3)应代入实际角度参与计算。
2 船体处于平静海面时的井喷液柱高度测量
假定观测船航行在无限深广的静水中,船体为刚体,无浪无海流作用,船体平稳航行。角度测量装置置于甲板上,甲板平面平行于海平面。通过处于同一直线上3个角度传感器进行倾角测量,得到3测点A,B,C测量角度分别为α1,α2,α3。如图3所示。
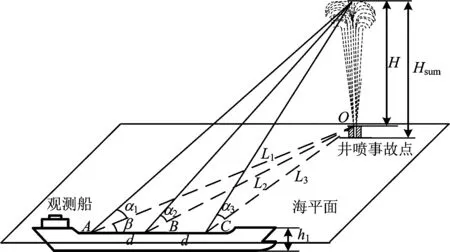
图3 高度测量方法示意Fig.3 Height measurement method diagram
如图3所示,设甲板高度为h1,m;吃水深度为h2,m。传感器距甲板高度为h3,m;两角度传感器间距为d,m。根据三角函数相关定理,求得观测点距井喷液柱平面距离分别为:
(4)
式中:L1,L2,L3分为A,B,C这3个观测点距事故井水平投影距离,m;H为传感器距井喷液柱最高点垂直距离,m;α1,α2,α3,分别为3个观测点测量角度,(°)。
分别在三角形△ABO与△ACO中分别应用余弦定理可得:
(5)
(6)
式中:β为水平投影面中L1与传感器连线所在直线夹角,(°);d为两角度传感器间距,m。
联立式(5)与式(6),得到三水平投影距离关系式为:
(7)
将式(4)中表达式代入式(7)中得到高度H的表达式为:
(8)
综上,井喷液柱总高度Hsum为:
(9)
3 船体处于波动海面时的井喷液柱高度测量
观测船在航行过程中,受风浪流载荷作用,船体会发生摇晃倾斜,对这种运动状态可以简化描述为三自由度[14]运动,即横摇,纵倾和垂荡,如图4所示。
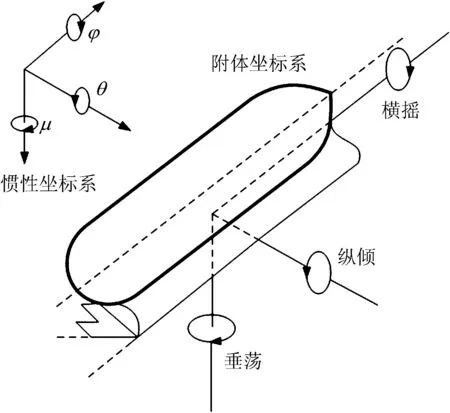
图4 船体三自由度示意Fig.4 Schematic three-degree of freedom diagram
船体发生摇晃后,甲板平面(测量传感器平面)与海平面不再平行,产生倾角,对高度测量计算造成影响。分别考虑3种倾斜状态给出修正后的高度计算公式。
第1种情况,仅考虑横摇状态对井喷液柱高度测量的影响。设横摇倾角为φ,(°)。发生横摇时,实际倾角为角度测量传感器所测角度与横摇倾角之差,即:
α实=αn-φ(n=1,2,3)
(10)
将实际角度表达式(10)代入式(9)中,得到横摇时井喷液柱修正高度H修1为:
H修1=(h-h1)+h2+

(11)
第2种情况,仅考虑纵倾状态对井喷液柱高度测量的影响。设纵倾倾角为θ,(°)。每个角度测量传感器不处于同一水平高度,导致传感器到井喷液柱最高点垂直距离出现差别,充分考虑纵倾状态对液柱高度测量的影响,得到修正后的计算公式为:

(12)
第3种情况,仅考虑垂荡状态对井喷液柱高度测量的影响,设垂荡高度为μ,m。船体处于垂荡状态仅改变传感器到井喷液柱最高点垂直距离,只需要在式(9)中增加垂荡高度相即可,得到修正后的高度计算公式为:
(13)
综合考虑以上3种因素,即横摇、纵倾和垂荡对井喷液柱高度测量的影响,得到修正后的高度计算公式为:
H修=(h-h1)+h2+

(14)
4 井喷液柱高度测量精度分析及改进
本研究中应用角度测量传感器对井喷液柱高度进行测量,影响高度测量精度的因素有以下几个方面:传感器测量精度、甲板振动和传感器布置位置。
首先分析传感器自身测量精度误差的影响。根据现场实际需要,假设观测船距井喷事故井400 m,井喷液柱高度大约40 m,要求井喷液柱高度测量误差小于5%(即测量结果误差小于2 m)。通过式(9)运算分析,对应角度误差小于0.57°。因此,选择光栅式角度传感器[15],光栅式传感器依据莫尔条纹现象,测量精度可达0.06°,测量输出信号易数字化处理,可进行动态监测。
在现场实际操作过程中,角度传感器不可避免地受甲板振动的影响,造成测量结果波动严重,影响测量精度。应采用滤波算法进行信号处理,提高测量精度。振动杂波信号一般为高斯白噪声,使用卡尔曼滤波方法对收集信号进行滤波处理。
离散卡尔曼滤波算法的相关公式如下:
1)系统方程
Xk=ΦXk-1+HWk
(15)

2)测量方程
Zk=CXk+Vk
(16)
式中:C=[1,0];Zk为测量输出;Vk为测量噪声。
Vk与Wk不相关,同时还要满足方程E[Vk]=0;E[Vk,VjT]=Rδkj;E[Wk]=0;E[Wk,WjT]=Qδkj。其中,Q为系统方差阵,R为测量方差阵。
3)1步预测阵
(17)
4)状态估计
(18)
5)增益
Kk=Pk/(k-1)CT(CPk/(k-1)CT+R)-1
(19)
6)1步预测方差估计
Pk/(k-1)=ΦPk-1ΦT+HQHT
(20)
7)方差估计
Pk=(1-KkC)Pk(k-1)
(21)
在实际操作中,传感器位置对测量结果有很大的影响,假设井喷液柱高度为40 m,观测船距事故井口400 m,分析传感器间距对测量精度的影响。为简化计算令式(9)中α1=α3,计算结果如图5所示。

图5 测点距离与传感器角度差关系Fig.5 Measuring point distance and sensor angle difference curve
从图5中可知,随测点间距的增加,两传感器测量值差值越大,差值越大分辨率越高,测量精度也就越高。换言之测点间距越大,测量结果越精准。为满足仪器精度(0.01°)的要求,最小间距应大于24 m,最大间距受船只尺寸限制,原则上距离越大,测量越精准。
5 实验验证
为了验证角度计算公式合理性与测量方法的准确性,设计模拟实验。分别针对水平、横摇、纵倾、垂荡以及多因素耦合作用情况进行分析验证。
实验参数设置如图6所示,观测场地为20 m×20 m方形场地,目标高度H=5.00 m,测点间距为d=5.00 m,测点连线与正西方向夹角为ρ=30°。
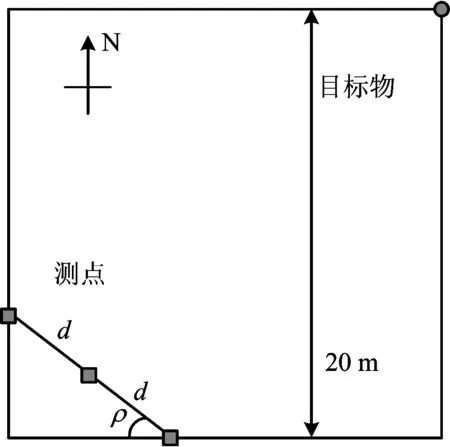
图6 实验布置示意Fig.6 Experimental layout
横摇角度为2°,纵倾角度为2°,垂荡高度为0.2 m,得到实验结果如表1所示。
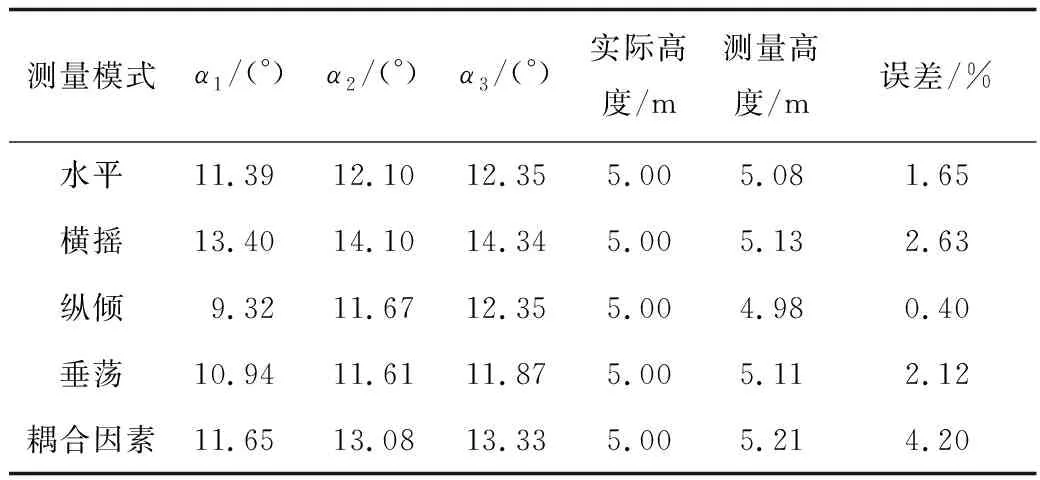
表1 实验结果统计Table 1 Statistics of experimental results
分析表1可知,在考虑三自由度对高度测量的影响的前提下,实验最大误差为4.2%,满足现场实际要求,本方法可以用于井喷液柱高度测量。
6 结论
1)为满足井喷液柱高度测量配套测试方法使用,研究提出了一种新型倾角测量装置,经实验验证,可以满足角度测量要求。
2)高度测量精度受倾角传感器测量精度影响大,可通过调节测点间距将其消除。在测量精度为0.01°,距离为400 m时,为保证测量精度两测点间距应大于24 m,同时测点间距越大,测量精度越高。
3)数据信号处理采用卡尔曼滤波法,较好地消除了甲板震动等因素的影响,可有效地提高测量稳定性与准确性。
4)模拟实验验证中,针对高度为5 m的目标物体,不同船体状态下的测量结果误差均控制在0.21 m以内,误差小于4.2%,能够满足海洋井喷救援测量应用需求。