基于模糊PID控制的大尺寸KDP晶体生长装置恒温控制
2018-11-05赵峥王永青杨强翟英汉
赵峥,王永青,杨强,翟英汉
(大连理工大学 机械工程学院,辽宁 大连 116024)
0 引言
光电非线性光学晶体磷酸二氢钾(KDP)晶体,具有光学性能好,非线性系数大,透光波段宽,相位匹配容易等优点,被广泛应用于激光变频、电光调制、光电开关等领域。四方相晶型与单斜相晶型是KDP晶体常温下常见的两种相态。其优良光学性能主要由四方相晶型体现。在大尺寸KDP晶体快速生长过程中,溶液温度均匀性差和温度调控慢等因素会导致四方相晶发生晶变使晶体出现单斜相,抑制四方相生长。且温度的不稳定性亦会导致晶体生长速度减慢,甚至产生开裂现象。因此,为提高晶体生长质量,国内外学者对大尺寸KDP晶体快速生长装置与生长控制技术进行了系列研究。美国LLNL实验室N.Zaitseva等[1-2]设计了一种基于循环过滤的晶体生长控制装置,并研究了晶体生长过程中自发形核的机理。王波、许心光等[3-4]指出“点籽晶”快速生长法优于传统降温法,可缩短大尺寸KDP单晶生长周期。鲁智宽等[5-6]研制了四槽循环流动生长装置,通过实验发现生长液控温精度对大尺寸KDP晶体生长质量的影响。其研究表明,温控精度控制在±0.1 ℃以内时,溶液浓度会因温度场不均产生波动,影响晶体的损伤阈值。传统小尺寸晶体生长装置温控手段大都采用PID控制,即通过温控仪连接测温元件和加热元件实现温控。但这种温控方式不能克服大尺寸晶体生长溶液的时变性强、滞后大、线性度差等缺点,对温控精度与响应速度二者难以兼顾。本文针对大尺寸KDP晶体生长过程中,溶液温度难以调控的问题,设计一套基于模糊PID的溶液温度控制系统,以满足大尺寸KDP晶体生长温度控制的要求。
1 温度控制对象的建模与分析
依据KDP晶体生长的温度控制精度要求,为实现生长尺寸达到500 mm×500 mm×800 mm的KDP单晶,并确保其高光学质量,采用改进的三槽溶液循环流动生长装置,以水浴箱加热方式替代传统生长装置中的空气浴加热方式,结合浆式搅拌器,以保证均匀的水浴温度。
基于热力学能量守恒原理,得到KDP晶体生长水浴温度控制系统的方程:
(1)
式中:C:水浴温度的比热容,常量,J/K;T:水浴温度,变量,K;Te:环境温度,常量,K;t:时间,变量,s;Q:单位时间加热热量(加热功率),变量,W;h1:表征单位时间水浴与周围环境的换热系数,常量,J/(Ks);h2:表征单位时间水浴与KDP晶体溶液的换热系数,常量,J/(Ks);h3:表征单位时间KDP晶体溶液与周围环境的换热系数,常量,J/(Ks);Ts:KDP晶体溶液的温度,变量,K。
令ΔT=T,ΔTs=Ts,ΔT1=T-Ts=ΔT-ΔTs,得:
(2)
由式(2)可见,KDP晶体生长加热系统可整体视为一阶惯性系统,而KDP晶体溶液温度与水浴温度之差,以该整体系统的外界干扰来处理,从而将式(2)经Laplace变换,获得KDP晶体溶液温度控制对象的模型。
控制对象的传递函数:
(3)
干扰输入对控制对象传递函数:
(4)
在KDP晶体生长中,生长槽、过热槽与溶解槽的控制目标是温度稳定在一个特定的值,将温度控制对象简化为惯性系统并串联大滞后环节,其控制输入量为热量,采用控制占空比的方法实现对输入热量功率的控制。
综上对温度控制系统的开环特性的分析,本文所述的大尺寸KDP晶体温度控制系统具有以下3个控制特点:
1) 温度控制对象存在滞后环节;
2) 温度控制对象具有较大的一阶时间常数,使得控制系统对输出的响应缓慢,系统的快速性能较差;
3) 环境温度的变化造成温度控制对象的时间常数的变化,使得温度控制对象具有时变性的特点。温度控制对象的框图如图1所示。
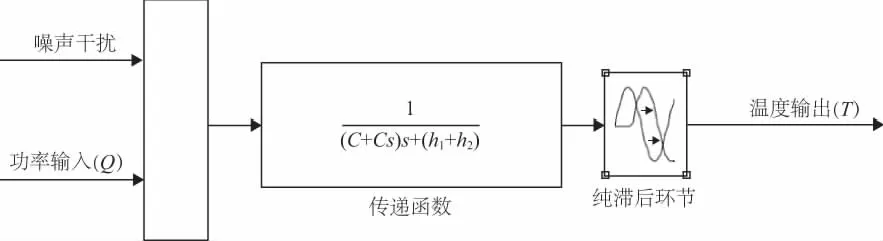
图1 温度控制对象框图
2 系统硬件设计
模糊PID温度控制系统的硬件系统由7部分组成:溶液温度采集模块、溶液温度传感器、工控机、控制量输出模块、固态继电器及加热棒。结构如图2所示。
在大尺寸KDP晶体生长过程中,生长溶液温度通过铂电阻温度传感器测量,测量数据通过铂电阻温度采集模块与串口转换器RS485传输到工控机中。设定目标溶液温度,通过模糊PID的控制算法,得到PWM数据,并通过数字量输出模块输出TTL电平控制信号,对固态继电器的进行控制,实现电阻丝加热器的通断,完成系统的温度控制。
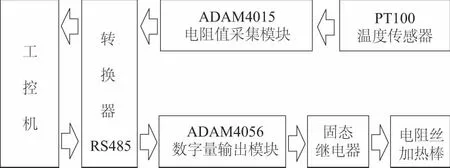
图2 控制系统结构图
3 系统软件设计
3.1 模糊PID控制方法
1) PID控制方法
模拟系统中PID算法为:
(5)
其中,u(t)为控制器输出量,e(t)为控制器输入量(本例为测得温度值与给定温度的差),kp为比例系数,Ti为积分时间常数,Td为微分时间常数。
基于计算机内采用数字量运算,将式(5)离散化得公式(6)。
(6)
其中,k=1,2,3,…,为采样序列。
2) PID参数模糊整定
根据模糊集合理论,采用二维模糊PID控制模型,将测量温度与目标温度偏差|E|及其偏差变化率|EC|作为控制模型的输入量,建立PID控制参数kp,Ti,Td与输入量间的二元连续函数关系:kp=f1(|E|,|EC|)、Ti=f2(|E|,|EC|)、Td=f3(|E|,|EC|),实现对PID控制器中的参数kp,Ti,Td进行在线自整定,最终输出相应的功率值进行溶液温度调控[7]。原理如图3所示。
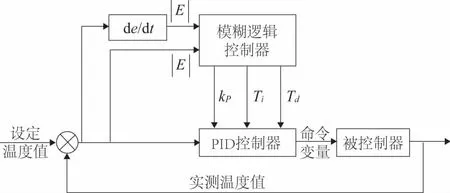
图3 模糊PID控制原理图
3.2 模糊PID控制器设计
通过采用Labview软件PID控制程序,将PID子VI中对应端子与所需参数模块相连[8],结果如图4所示。
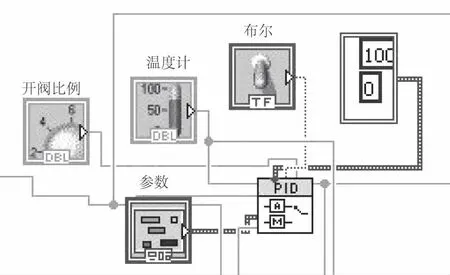
图4 PID控制程序
为建立输入量与输出量的关系,首先确定输入量与输出量的论域。由于输入量温度偏差|E|与偏差变化率|EC|均为正,输出参数kp,Ti,Td为正值。因此,对输入、输出量均采用正模糊化语言:正非常小(PVS),正小(PS),正中小(PMS),正中(PM),正中大(PMB),正大(PB),正非常大(PVB),论域均为{0,1,2,3,4,5,6}。
其次,确定输入、输出量的量化因子。由于晶体生长溶液目标温度预设为50℃,自然环境温度为20℃,温度差≤30℃,因此温度偏差|E|实际论域为[0,30],量化因子为5;当加热器全功率加热时,温度变化率为0.3℃/s,由系统采样周期为5s,|EC|的实际论域[0,0.03],量化因子为0.005。输出参数方面,由专家经验与实验测定可知,kp的实际论域为[0,9],量化因子为1.5;Ti实际论域为[0,0.006],量化因子为0.001;Td的实际论域为[0,0.018],量化因子为0.001 5[9]。
然后,选取相应隶属度函数。常见的隶属度函数有3种:三角形,钟形与梯形。由于3种隶属度函数对大溶液温控方面的控制效果并无显著差异,选择较为简单的三角形隶属度函数。其中,图5为Labview软件所编写的输入偏差|E|的隶属函数分布图。
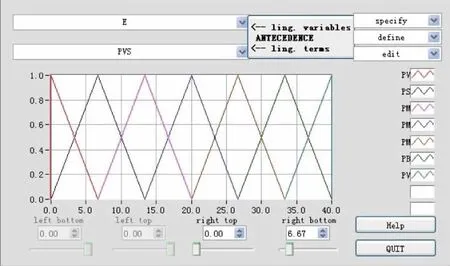
图5 输入偏差|E|的隶属度函数
同理编写|EC|,kp,Ti,Td的隶属度函数。
最后,由PID控制原理制定相应的模糊规则,比例系数kp使控制量朝偏差减小方向变化;积分时间常数Ti则使偏差累积,通过控制量输出从而消除偏差,Ti与积分作用强弱成反比例关系;微分时间常数Td决定微分部分的作用强弱,Td与抑制偏差变化程度成正相关。
当晶体生长时,较大的溶液温度偏差与偏差变化率表明溶液温度变化正处于初始阶段,为使温度迅速升高,需较大的kp量,较大的Ti,同时需要较小Td以保持系统的稳定与提高抗干扰能力;当溶液温度偏差较小且偏差变化率较大时,溶液温度正趋于目标温度阶段,此时需适中的kp,Ti,Td来减少超调量,消除偏差;当溶液温度偏差较大,而温度偏差变化率较小时,表明溶液温度正处于震荡阶段,需选择适中的kp,较小的Ti,适中的Td以减弱震荡,消除偏差及加快调节速度;当溶液温度偏差与偏差变化率均较小时,说明溶液温度接近稳定状态,需较小的kp,较小的Ti,较大的Td以保持系统的稳定性,缩短响应时间与提高温控精度。
由以上分析得出kp,Ti,Td规则库如表1-表3所示。

表1 kp的模糊规则表
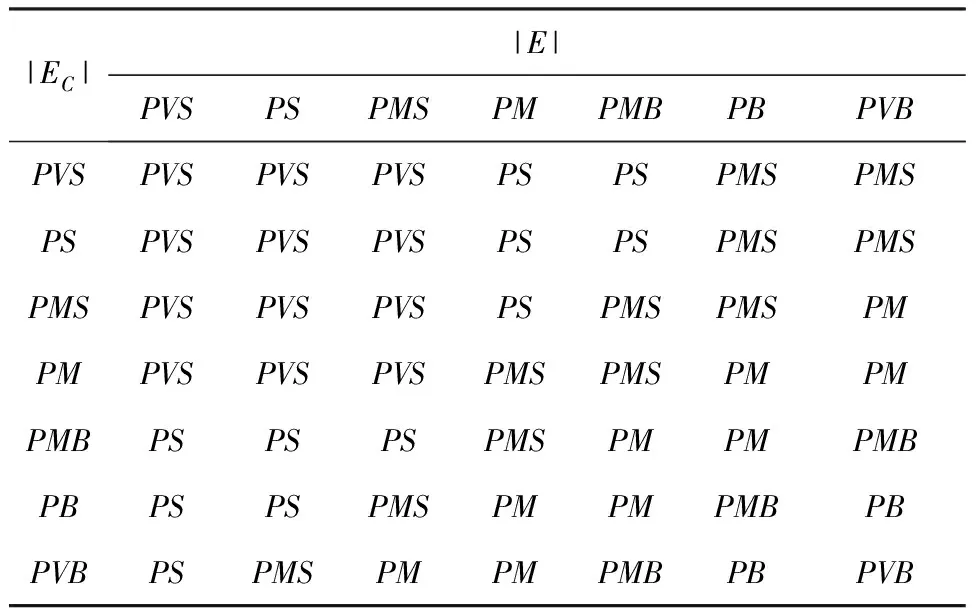
表2 Ti的模糊规则表
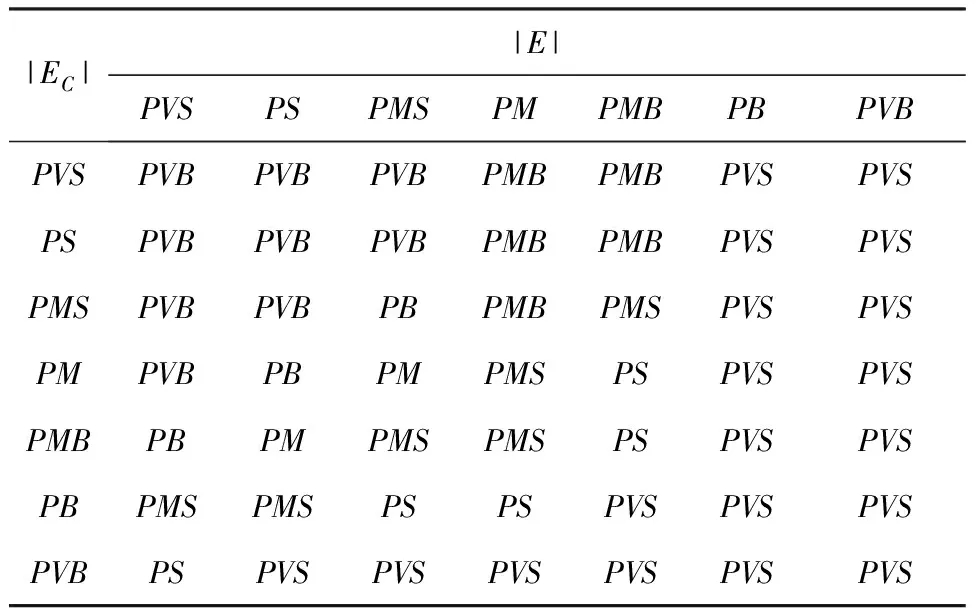
表3 Td的模糊规则表
3.3 温度采集及数据存储
1) 温度采集
为满足大尺寸KDP晶体生长溶液温度控制精度±0.1℃要求,结合铂电阻稳定性高、温度-阻值线性度较好、精度高等特点,温度传感器(铂电阻)选型为PT100型。当测量温度为0℃~800℃时,PT100阻值与温度满足二次函数关系:
Rt=R0×(1+A×t+B×t2)
(7)
其中,A、B为铂电阻本身性质决定的常数,R0为0℃该铂电阻的阻值,t为温度值,Rt为该温度下对应的铂电阻阻值。由最小二乘法拟合得:R0=99.990 62Ω,A=3.909 86×10-3,B=5.899 64×10-7。通过采集程序中设置所得参数R0、A、B即可获取实时温度值[10]。温度采集程序框图如图6所示。
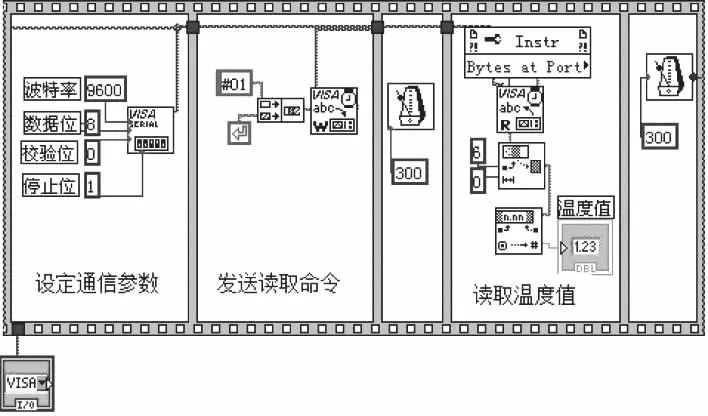
图6 温度采集程序
由于信号采集与数字量输出都需通过串口进行,为防止系统报错,在串口读写后设置300ms时间延迟量。
2) 数据存储
大尺寸KDP晶体生长周期一般为1~1.5年。由于生长周期较长,为保证KDP晶体的生长质量,需长期监控其生长过程。本装置采用实时监控方式,即每5 s采集一次温度。然而,晶体生长溶液温变过程缓慢,高频存储会产生大量冗余数据,且长期、大量数据储存需庞大的存储空间。因此,为精简数据提高存储效率,将采集周期设定为10次,即采集10次后,记录函数将被触发进而对温度进行记录和存储,存储周期为50 s。设计数据储存程序如图7所示。

图7 数据存储程序
3.4 脉宽调制的实现
为实现对固态继电器的控制,将溶液温度经模糊PID控制的输出量,即功率的百分比,转换成可调占空比的脉冲信号[11-13]。因此,采用脉冲宽度调制方法,通过Labview顺序执行一定周期占空比的高、低电平程序,使得微处理器产生数字输出,实现对模拟电路进行控制。脉宽调制程序如图8所示。
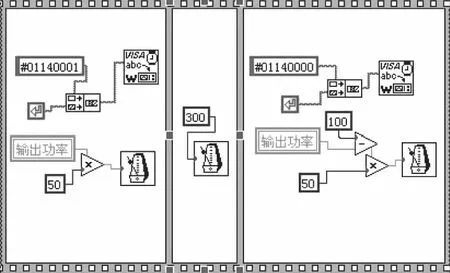
图8 脉宽调制程序
4 实验验证
为验证大尺寸KDP晶体生长溶液温度模糊PID控制方法的优越性,针对大尺寸KDP晶体生长溶液的温度控制方法,进行了传统PID温度控制与模糊PID温度控制对比试验研究。
采用传统PID控制方法和模糊PID控制方法对溶液分别进行升温实验。溶液初始温度值为20℃,加热目标温度值为40℃,且以50s为记录周期。整定PID相关参数为:kp=5,Ti=0.05,Td=0.08。采用传统PID控温时,晶体生长溶液温升曲线如图9所示,溶液温度稳态时间为2 500s,最大超调量为2.4℃,稳态下控温精度为±0.1℃;采用模糊PID控温时,晶体生长溶液温升曲线如图10所示,溶液温度稳态时间为1 000s,最大超调量为1.5℃,稳态下控温精度为±0.5℃。由此可知,采用模糊PID控制比传统的PID控制具有控温精度高、响应速度快、超调量小的优点。
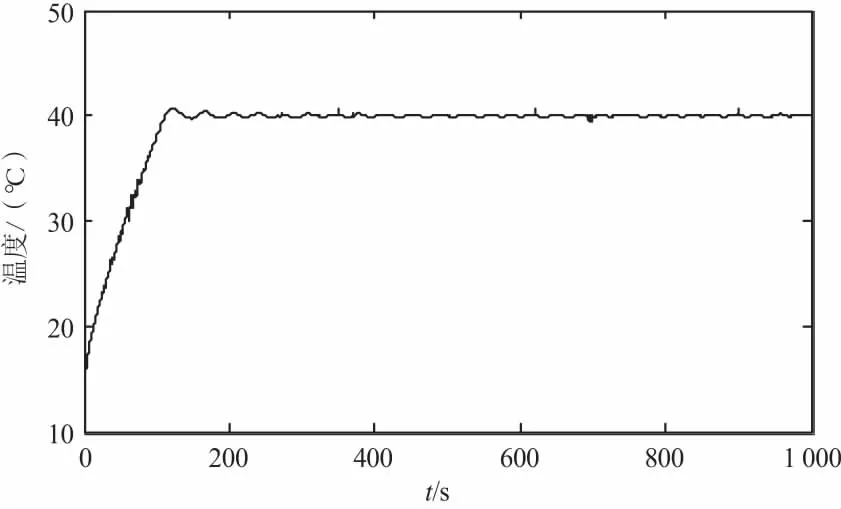
图9 传统PID控制温升曲线
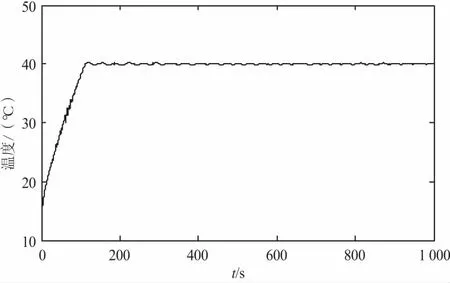
图10 模糊PID控制温升曲线
5 结语
结合离散控制系统的一般性特点,针对大尺寸KDP晶体快速生长的溶液温度难以精确、快速控制的问题,完成了基于Labview模糊PID控制器的设计,并加入参数实时在线整定模块,依托专家经验的在线调整技术解决了响应速度和超调量之间的悖论。通过实验验证模糊PID控制的控温精度为±0.5℃,超调量为1.5℃,提高了控制精度,满足了大尺寸KDP晶体生长的需要,为解决类似滞后性大、快速性能差、噪声干扰严重以及时变特性强的被控对象提供了可行性方案。
