一种内反馈控制器IFC的研究与应用
2018-10-15李军陈世和万文军王越超黄卫剑
李军 陈世和 万文军 王越超 黄卫剑
模型是现代先进控制理论的基础,经过数十年的发展,理论研究成果相当丰富和完善[1−3].然而,经典 PID(Proportion integration differentiation)[4−5]控制仍占据着工业过程控制的主导地位.不过PID抑制不确定性的能力至今还不是很好[6].长期以来,围绕改进PID的各种研究一直没有间断,如最优PID控制[7−9],在现代先进控制理论的研究中还融入了PID算法[10−11].
将PID用于高阶对象的控制,存在模型的降价[12−13]和参数整定[14−15]等问题.
随着各种高性能控制方法的提出,控制器的结构也更加趋于复杂化.
为了克服PID的缺点和摆脱对象模型的束缚,韩京清[16]提出了基于非线性最速跟踪(Nonlinear optimal tracking,NOT)的非线性跟踪微分器(Nonlinear tracking differentiator,NTD) 和非线性扩张状态观测器(Nonlinear extended state observation,NESO)等.在此基础上提出了以NESO为核心的非线性自抗扰控制器(Nonlinear active disturbance rejection controller,NADRC)[16].
NADRC包括NESO的参数较多和调整比较困难,不利于工程应用.Gao[17]在自抗扰控制器(Active disturbance rejection controller,ADRC)包括扩张状态观测器(Extended state observation,ESO)的线性化方面做了大量卓有成效的工作,实现了线性自抗扰控制器(Linear active disturbance rejection controller,LADRC)和线性扩张状态观测器(Linear extended state observation,LESO)等,简化了ADRC和ESO参数的调整等,为推广ADRC的工程应用奠定了一定的基础.今天,ADRC的研究和应用成果已较为丰富[17−20],ADRC的抗扰控制效果引起了业界的关注.目前ADRC仍然难以大规模进入工业应用,其中的原因值得思考.ADRC在抗扰控制上虽然有效,但ADRC的结构不一定合理,例如ADRC远比PID复杂.ADRC的最大问题在于不被工程人员普遍认可.
文献[18]给出了一种NADRC与LADRC切换的控制方法(Nonlinear/Linear active disturbance rejection controller,N/LADRC).根据给出的实验结果:在扰动幅值较小时,NADRC的性能优于LADRC;反之在在扰动幅值较大时,LADRC的性能又反优于NADRC.NADRC与LADRC的这种差异反映出了滤波问题的重要性,同时也反映出非线性滤波方法和线性滤波方法的各自不足.
理论上,ADRC的阶数需要与控制对象的阶数相适应.在控制工程实践中,跨阶控制又是普遍存在的.将低阶ADRC用于高阶对象的控制,存在抗扰性下降的问题.直接的解决方法就是增加ADRC的阶数.但是随着ADRC阶数的增加,ADRC的结构也更加趋于复杂化,超过3阶以上ADRC的结构已经非常复杂了.另一方面,高阶ADRC不一定具有工程意义,例如四阶ADRC的高频增益峰值高出二阶ADRC两个数量级.因此,将低阶ADRC用于高阶对象的控制同样存在对象模型的降价[12−13]等问题.
文献[6]指出:PID具有天生的抗扰性.PID在控制工程中的长盛不衰,说明PID的结构是符合客观规律的,是合理的.事实上,LADRC也是一种包含内部PID(Inside proportion integration differentiation,IPID)控制器的复合控制结构.
PID具有普遍的适应性,而如何能够在PID控制器的基础上发挥出较好的控制特性始终是人们追求的目标.笔者通过长期工程实践的探索,提出了一种内反馈控制器(Internal feedback controller,IFC).IFC具有简单的结构,较少的调整参数和较好的鲁棒性,较强的抗扰性和较强的工程适应性等,特别是用IFC容易构造出高阶控制器.目前IFC已取得了比较满意的仿真实验和实际应用效果.
文中变量包括名称的表达具有唯一性,可相互引用.
1 内反馈控制系统
内反馈控制系统(Internal feedback control system,IFCS)结构如图1所示.

图1 内反馈控制系统结构示意图Fig.1 Structure diagram of internal feedback control system
在图1中,IFCS由内反馈控制器(Internal feedback controller,IFC)、输入函数发生器(Input function generator,IFG)、标称模型(nominal model,NM)、正弦跟踪滤波器(Sinusoid tracking filter,STF)[21]、外扰模型 (External disturbance model,EDM)等构成.IFC由高增益PI控制器(High gain proportion integration,HGPI)、内反馈器(Internal feedback device,IFD)所构成.其中STF用于IFC的降价处理.
1.1 标称模型
定义标称模型NM的主要目的是为了方便IFC参数的设置.实际控制对象(Control object,CO)与NM之间可能存在很大的不确定性,IFCS对这种不确定性具有良好适应性.
笔者服务于电力系统,电力系统的火电厂的对象大都具有惯性的特点,例如高阶惯性、高阶惯性加纯滞后、惯性加纯积分等.定义NM:

式中,WNM(s)为NM的传递函数.n为NM的惯性阶数,无量纲.Tα为NM的惯性常数,单位s.Kα为NM的增益,无量纲.
NM不考虑一阶系统的情况,即n=1.
1.2 输入函数发生器
由于IFC内含理想微分器(TIFDs),在输入阶跃变化时的输出幅度较大,需要通过输入函数发生器IFG限制IFC输入变化的速率.可将IFG看成是一种简单的过程轨迹控制器.IFG采用一阶惯性环节:

式中,WIFG(s)为IFG的传递函数.TIFG为惯性常数,单位s.
1.3 内反馈控制器
内反馈控制器IFC是一种由HGPI和IFD构造的负反馈结构.IFC的实质是通过HGPI实现IFD的逆变换.简单理解,IFC是IFD的逆模型.
1.3.1 高增益PI控制器
运算放大器(Operational amplifier,OA)[22]在众多领域有广泛的应用.OA的输出特性主要是由OA的负反馈结构(Negative feedback structure,NFS)所决定的.OA的基本特性,即足够高的开环增益(例如高达106或120dB)和闭环稳定(已不成问题)的特性,使OA的闭环运算足以对抗OA自身的各种不确定因素的影响.OA加NFS能够实现各种高性能的运算特性,例如对数放大器[23].参考OA的基本特性,文中设计了HGPI.
HGPI的实质是IFD的一种逆变换器.HGPI表达为

式中,WHGPI(s)为HGPI的传递函数,KHGPI为HGPI的比例增益,无量纲.THGPI为HGPI的积分常数,单位s.
1.3.2 内反馈器
内反馈器IFD直接决定了IFC的控制特性.笔者通过长期的探索,提出了一种对应于NM的IFD结构.IFD 以一阶微分(First-order differential,FOD)环节和一阶惯性(First-order inertia,FOI)环节为基础,图2所示:

图2 内反馈器结构示意图Fig.2 Structure diagram of internal feedback device
IFD 由 FOD、 FOI(包 括 FOI-1、FOI-2、···、FOI-n,其中 FOD 内含 FOI-1)、比例环节(Proportion link,PL)等所组成.n为IFD的阶数.IFD传递函数为

式中,WIFD(s)为IFD的传递函数.KIFD为PL的增益,无量纲.TIFD为统一的时间常数,单位s.式中可知,在n=2,则IFD不含FOI-3之后的FOI环节.
1.3.3 参数设置原则
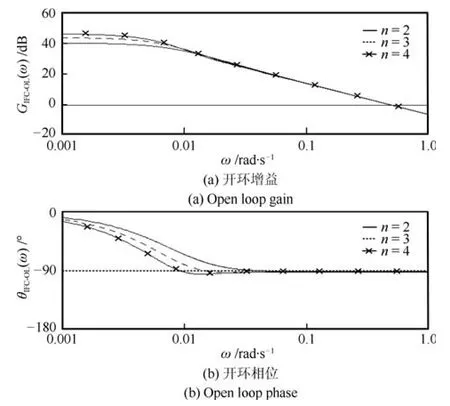
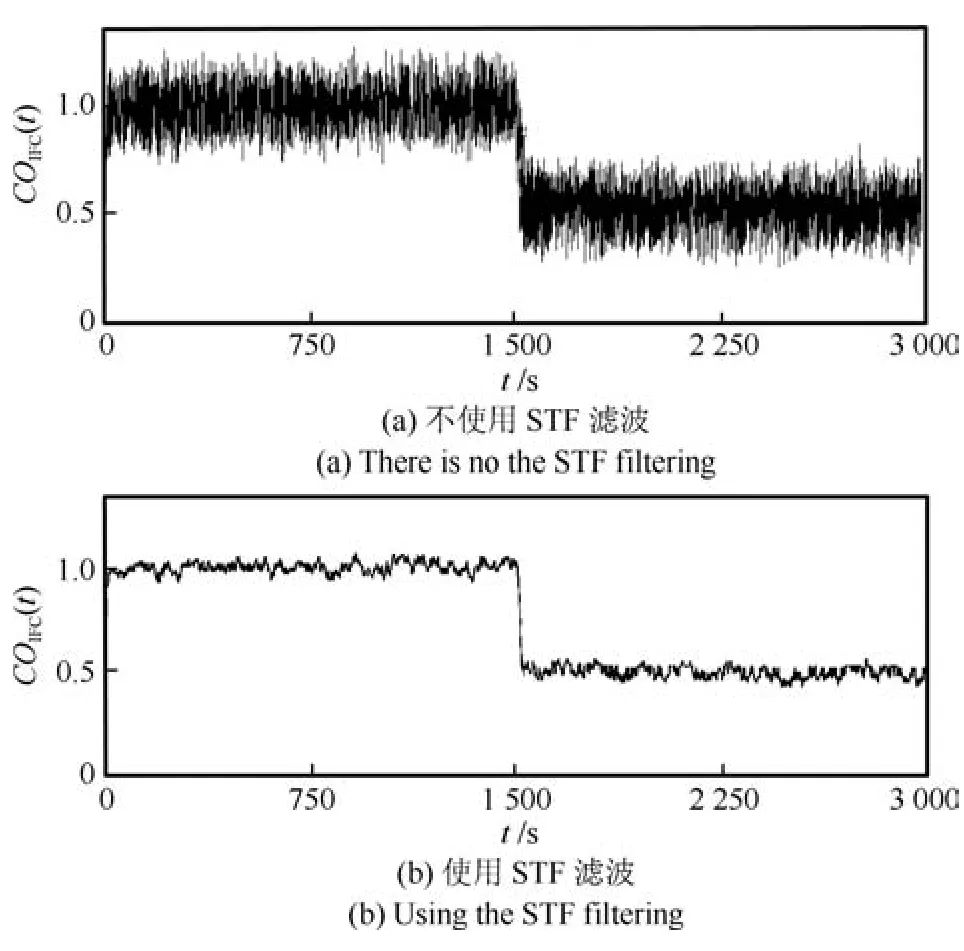
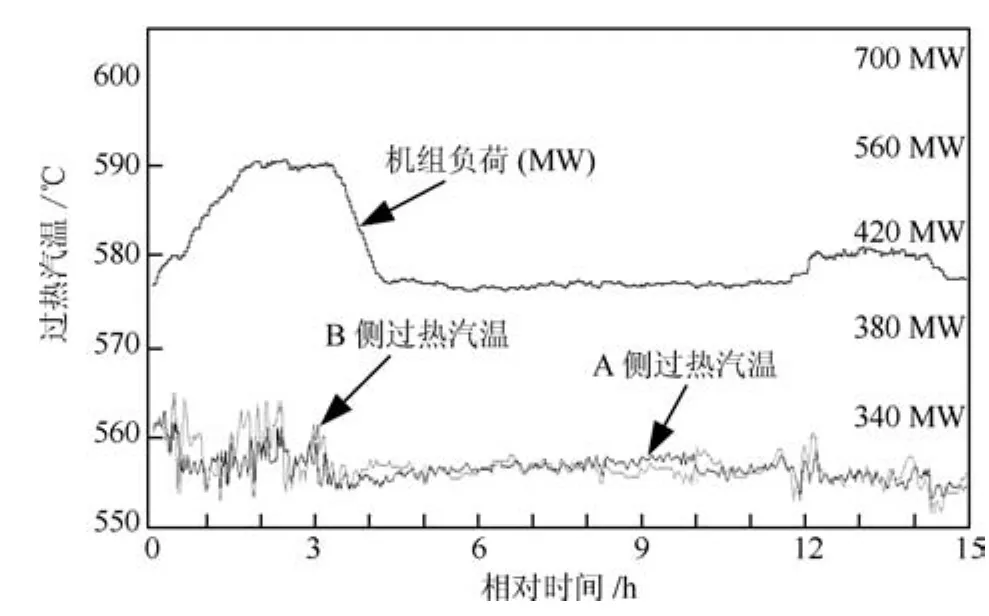
HGPI参数设置原则:在连续时间域实现HGPI,例如采用OA实现HGPI,则无需考虑KHGPI和THGPI的问题.如果在数字计算机中实现HGPI,则HGIP参数设置原则是:KHGPI>>1/KIFD,THGPI<<1/TIFD.但同时需要满足:KHGPI 原则上,IFD参数与NM 参数对等,包括:TIFD=Tα,KIFD=Kα,n相同. 对于FG,出于简单化考虑,如文中无特别说明,设置TIFG=TIFD. 理论上,系统的闭环稳定性是由开环系统的稳定裕度所决定的. 高增益PI控制器HGPI的频域函数: 式中,WHGPI(jω)为HGPI的频域函数.IFD 的频域函数: 式中,WIFD(jω)为IFD的频域函数.IFC的频域开环函数: 式中,WIFC-OL(jω)为IFC的频域开环函数.将式(7)转换为频域开环增益和开环相位的表达形式,为式(8). 式中,GIFC-OL(ω)为IFC的频域开环增益,无量纲.θIFC-OL(ω)为IFC 的频域开环相位,单位°. 省略推导过程,在KIFD=1,TIFD=100s,KP=50,TI=2s,得到GIFC-OL(ω) 和θIFC-OL(ω)的计算结果如图3所示: 图3 内反馈控制器开环频率特性示意图Fig.3 Frequency characteristic diagram of internal feedback controller of open loop 图3中,IFC开环系统的相位稳定裕度趋于90°,能够保证IFC闭环系统的高度稳定. 1.4.1 内反馈控制器闭环传递函数 内反馈控制器IFC的闭环传递函数,为式(9): 式中,WIFC(s)为IFC的闭环传递函数.WIFC(s)分子的s项阶次大于分母的s项阶次.但无论阶数n多少,分子仅比分母多1个s项阶次.因此在处理上相对简单,例如仅需要在IFC的外部增加一个二阶低通滤波器,文中采用了STF. 由式(9)可知,在IFD参数与NM参数对等的情况下,IFC内含了NM的逆模型. IFC还可以表达为一种包含内部PID控制器IPID的结构,为式(10): 式中,WIPID(s)为IPID的传递函数,内含理想微分器TIFDs.IFC的结构虽然包含IPID,但并不存在PID参数整定[14−15]的问题.这便是IFC区别于PID控制器的一个显著特点. IFCS闭环传递函数为 式中,WIFCS-CL(s)为IFCS闭环传递函数.在IFD参数与NM参数对等情况下,IFCS闭环传递函数相对NM的惯性阶数n降低了一阶,表明了IFCS具有较高的闭环响应速度.IFCS外扰抑制传递函数为 式中,WIFCS-EDI(s)为IFCS外扰抑制传递函数,WEDM(s)为EDM 传递函数.IFCS闭环响应速度越高,则消除外扰也越快.外扰幅值则与EDM有关,其中对于惯性传递,EDM 的惯性滞后越大,则外扰幅值也越小. 在参数设置原则上,要求IFD参数与NM参数对等.但在实际的运用中,完全可以用高阶的IFC去控制低阶的NM,可获得较好的鲁棒性.例如,根据一个四阶NM设计的四阶IFC不一定用于四阶NM的控制,而是用于二阶NM 或三阶NM 的控制.这也是IFC区别于其他类型控制器的显著优势所在. 四阶IFC的传递函数为 式中,WIFC-FO(s)为四阶IFC的传递函数. 四阶IFCS频域开环特性,为式(14): 式中,WIFCS-FO-OL(jω)为四阶IFCS的频域开环函数.GIFCS-FO-OL(ω)为四阶IFCS的频域开环增益,无量纲.θIFCS-FO-OL(ω)为四阶IFCS的频域开环相位,rad.PMIFCS-FO为四阶IFCS频域相位稳定裕度,单位°. 设IFC参数为:KIFD=1,TIFD=100s,n=4.NM参数为:n的范围在3~4,Kα的范围在0.5~2,Tα的范围在20~500s.得到四阶IFCS频域相位稳定裕度的计算结果,图4和图5所示: 图4 四阶内反馈控制系统频域相位稳定裕度(示意图1)Fig.4 Schematic diagram of frequency domain phase stability margin of four-order of internal feedback control system(NO.1) 图5 四阶内反馈控制系统频域相位稳定裕度(示意图2)Fig.5 Schematic diagram of frequency domain phase stability margin of four-order of internal feedback control system(NO.2) 图4中,PHIFCS-FO-FO代表四阶IFC控制四阶NM的频域相位稳定裕度,单位°. 图5中,PMIFCS-FO-TO代表四阶IFC控制三阶NM的频域相位稳定裕度. 图4和5说明,将高阶IFC用于低阶NM控制,具有更好的鲁棒性. 还可以将IFD看成是NM的一种并联降阶器.将IFD与NM并联,为式(15): 式中,WIFD+NM(s)为IFD与NM并联后的传递函数.在IFD参数与NM参数对等的情况下,无论n多少,IFD与NM 并联的结果得到一阶惯性环节.IFD的阶数与s项阶次不是一回事.无论IFD的阶数n多少,并不真正改变IFD分子和分母的s项阶次.这正是IFD与一些串级降阶器的本质区别所在.串级降阶器存在明显的缺陷,例如二阶串级降阶(二阶逆模型)带来的白噪声干扰放大问题较难处理. 由于内反馈控制器IFC传递函数的分子比分母多1个s项阶次,需要通过低通滤波器进行降阶.较好的降阶方法是采用二阶低通滤波器,例如二阶惯性滤波器(Second-order inertial filter,SOIF).但SOIF滤波的滞后较大,反过来对IFC的控制特性产生了明显不利的负面影响. 在控制理论的研究中,对滤波方法的研究始终是一个重要的问题.韩京清[16]提出了一种采用非线性最速跟踪的“高效”非线性二阶滤波方法,具有较小的滤波滞后特性.但是,非线性滤波方法也存在明显的不足,文献[24]指出,非线性的最速跟踪方法存在稳态跟踪误差,显然非线性滤波方法并不适合于IFC的降价处理. 文献[25]提出的正弦跟踪微分器(Sinusoid tracking differentiator,STD)包括文献[21]提出的正弦跟踪滤波器STF等,是一种基于正交混频方法[26]的“高效”线性二阶滤波方法.显著特点是:STD跟踪输入微分信号和STF跟踪输入信号的滞后较小,对白噪声干扰的滤波特性较好,滤波特性与输入幅值无关等.文中将STF用于IFC的降价处理. STF的基础是SOIF的变形结构[21],STF的内容读者可参考文献[21],文中仅给出STF与SOIF滤波特性的实验结果供参考. SOIF表达为式(16): 式中,WSOIF(s)为SOIF的传递函数.TSOIF为惯性常数,单位s.TSOIF也代表STF的滤波时间常数. 以输入单位阶跃激励为例,对二阶NM的过程输出信号进行STF滤波,在Tα=100s,Kα=1,得到的实验结果,图6所示: 图6 正弦跟踪滤波器特性示意图Fig.6 The trend of sinusoid tracking filter features 图6中,Y1-NM(t)为二阶NM 在单位阶跃激励下的过程输出信号.Y1-NM-STF(t)为STF在Y1-NM(t)激励下的输出信号.可见,STF的输出Y1-NM-STF(t)较好跟踪了Y1-NM(t)).实验结果表明,STF对IFC的控制特性基本没有影响. 出于对比,文中同时给出SOIF的滤波特性.在Tα=100s,Kα=1,得到的实验结果,图7所示: 图7 二阶惯性滤波器特性示意图Fig.7 The trend of second-order inertial filter features 图7中,Y1-NM-SOIF(t)为SOIF在Y1-NM(t)激励下的输出信号.可见SOIF的输出Y1-NM-SOIF(t)跟踪Y1-NM(t)的滞后较大. 仿真实验的数值计算由数字计算机完成,数值离散计算间隔为1s.IFCS的输入和外扰采用阶跃激励信号.EDM 采用一阶惯性环节,惯性常数为TEDM,单位s.HGPI参数为:KHGPI=30,THGPI=1s.出于对比,文中同时给出PID或PI(Proportion integration)控制的实验结果.其中PID中的微分作用采用一阶微分器. 用PVPI(t)表达PI控制的过程输出信号,用COPI(t)表达PI控制器的输出信号.用PVIFC(t)表达IFC控制的过程输出信号,用COIFC(t)表达IFC控制器的输出信号. 双积分对象(Two integral object,TIO)为式(17): 式中,WTIO(s)为TIO的传递函数.TA和TB为TIO的2个积分时间,单位s. 设置n=4,KIFD=0.25,TSOIF=10s,TIFG=TEDM=TA=TB=KIFD=100s,外扰量0.5,得到的实验结果,图8所示: 图8 双积分对象控制特性仿真实验结果Fig.8 The diagram of control characteristic simulation results of two integral object 图8所示,IFC控制TIO的特性较好.文中未给出PID或PD控制TIO的实验结果.原因是:PID控制TIO的特性相对不理想,PD(Proportion differentiation)虽然对TIO 有较好的控制特性,但存在较大的缺陷,对初始零点没有抑制作用,具体表现为对设定值之外的内扰(图1所示的内扰)没有抑制作用,例如在过程未稳定时投入了自动或进行了手动—自动的切换. 图9 低阶惯性对象控制特性仿真实验结果(示意图1)Fig.9 The diagram of control characteristic simulationresults of low order inertia object(NO.1) 图10 低阶惯性对象控制特性仿真实验结果(示意图2)Fig.10 The diagram of control characteristic simulation results of low order inertia object(NO.2) 低阶惯性对象(Low order inertia object,LOIO)为式(18): 式中,WLOIO(s)为LOIO的传递函数. 设置n=2,KIFD=Kα=1,TSOIF=10s,TEMD=Tα=TIFD=100s,TIFG=0s,外扰量0.5,得到的实验结果,图9所示. 在图13实验结果基础上,增加50s纯滞后,得到的仿真实验结果,图10所示. 图14所示,相对PID,IFC提高了抑制对象不确定性的能力.实验结果表明,一阶微分器的微分作用不完全,在实际控制实践中,应慎重地使用或不使用一阶微分器.之后仿真实验仅与PI控制对比. 图11 高阶惯性对象控制特性仿真实验结果(示意图1)Fig.11 The diagram of control characteristic simulation results of high order inertia object(NO.1) 图12 高阶惯性对象控制特性仿真实验结果(示意图2)Fig.12 The diagram of control characteristic simulation results of high order inertia object(NO.2) 图13 高阶惯性对象控制特性仿真实验结果(示意图3)Fig.13 The diagram of control characteristic simulation results of high order inertia object(NO.3) 图14 高阶惯性对象控制特性仿真实验结果(示意图4)Fig.14 The diagram of control characteristic simulation results of high order inertia object(NO.4) 高阶惯性对象(High order inertia object,HOIO)为式(19): 式中,WHOIO(s)为HOIO的传递函数. 设置n=3,KIFD=Kα=1,TSOIF=10s,TIFG=TEDM=Tα=TIFD=100s,外扰量0.5,得到的实验结果,图11所示. 在图11实验结果基础上,增加60s纯滞后,得到的仿真实验结果,图12所示. 在图11实验结果基础上,将Kα由1改为2,得到的仿真实验结果,图13所示. 图12和13所示,相对PI,IFC提高了抑制对象不确定性的能力. 在图11实验结果基础上,改变KIFD,得到的仿真实验结果,图14所示: 图14所示,通过减小KIFD,进一步提高了IFCS的闭环响应速度和外扰抑制特性. 文中还对STF的滤波特性进行了实验.在图11实验结果基础上,在IFC的过程输出信号PVIFC(t)中加入相对幅值0.02的白噪声干扰,得到的实验结果,图15所示. 图15 滤波特性仿真实验结果Fig.15 The diagram of filter characteristic simulation results 图15可见,STF对白噪声干扰具有显著的抑制作用. 将文中IFC运用于某电厂的某600MW燃煤机组的过热汽温调节系统的优化.出于对比,仅对A侧的过热汽温调节系统进行优化. 火电厂的过热汽温调节系统通常由主调节和副调节所构成,由于常用微分环节(一阶微分器)的微分作用不完全,一般均采用PI调节器.优化主要是将主调节PI回路改为IFC,如图16所示. 图16 过热气温调节系统优化示意图Fig.16 The optimization diagram of the superheated steam temperature regulation system 图16所示,负荷修正函数用于在不同的负荷下,修正内反馈器IFD和正弦跟踪滤波器STF的参数.其中在机组负荷405MW到565MW的变负荷过程,得到A侧过热汽温调节系统优化的效果,图17所示. 图17 优化后机组过热汽温度调节系统特性示意图Fig.17 The adjust properties of the superheated steam temperature regulation system after optimization 图17所示,在机组变负荷过程,A侧过热汽温波动的最大值减最小值为7.1°C,而B侧高达14.9°C.可见,IFC显著改善了A侧过热汽温调节系统的调节品质. 通过高增益PI控制器HGPI进行内反馈器IFD的逆变换,实现了内反馈控制器IFC.IFC带来了诸多的好处,再不用关心对象的阶数和降价问题,类似PID参数整定的问题等.正弦跟踪滤波器STF较好解决了白噪声干扰滤波和滤波滞后的矛盾,较好保证了IFC的控制特性.文中给出了IFC参数设置的简单原则.IFD还是一种对象的并联降阶器.IFC具有简单的结构,整定参数较少,较好的工程适应性,较好的鲁棒性和较强的抗扰性.此外,笔者所在的科研团队,还进一步开展了IFC工程参数整定方法的研究实践.文中提出的IFC是对控制理论的有益发展,具有重要的工程应用价值.数学分析、仿真实验和实际应用结果,验证了IFC的正确性和有效性.1.4 内反馈控制器开环频率特性



1.5 内部PID控制器

1.6 内反馈控制系统闭环特性分析


1.7 内反馈控制系统频域稳定预度分析
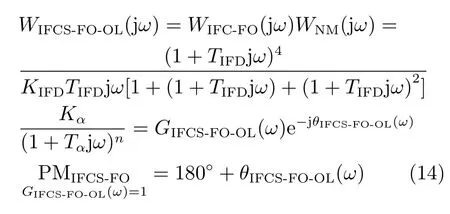


1.8 内反馈器的并联降阶作用

1.9 正弦跟踪滤波器



2 仿真实验
2.1 双积分对象控制




2.2 低阶惯性对象控制

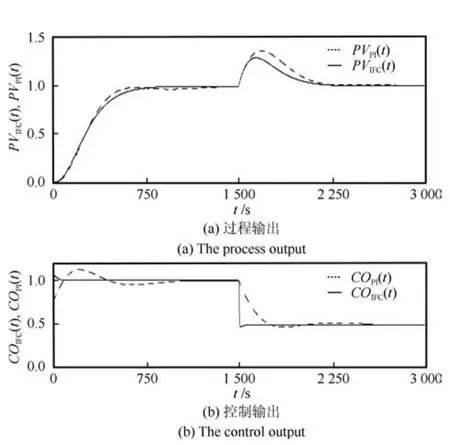
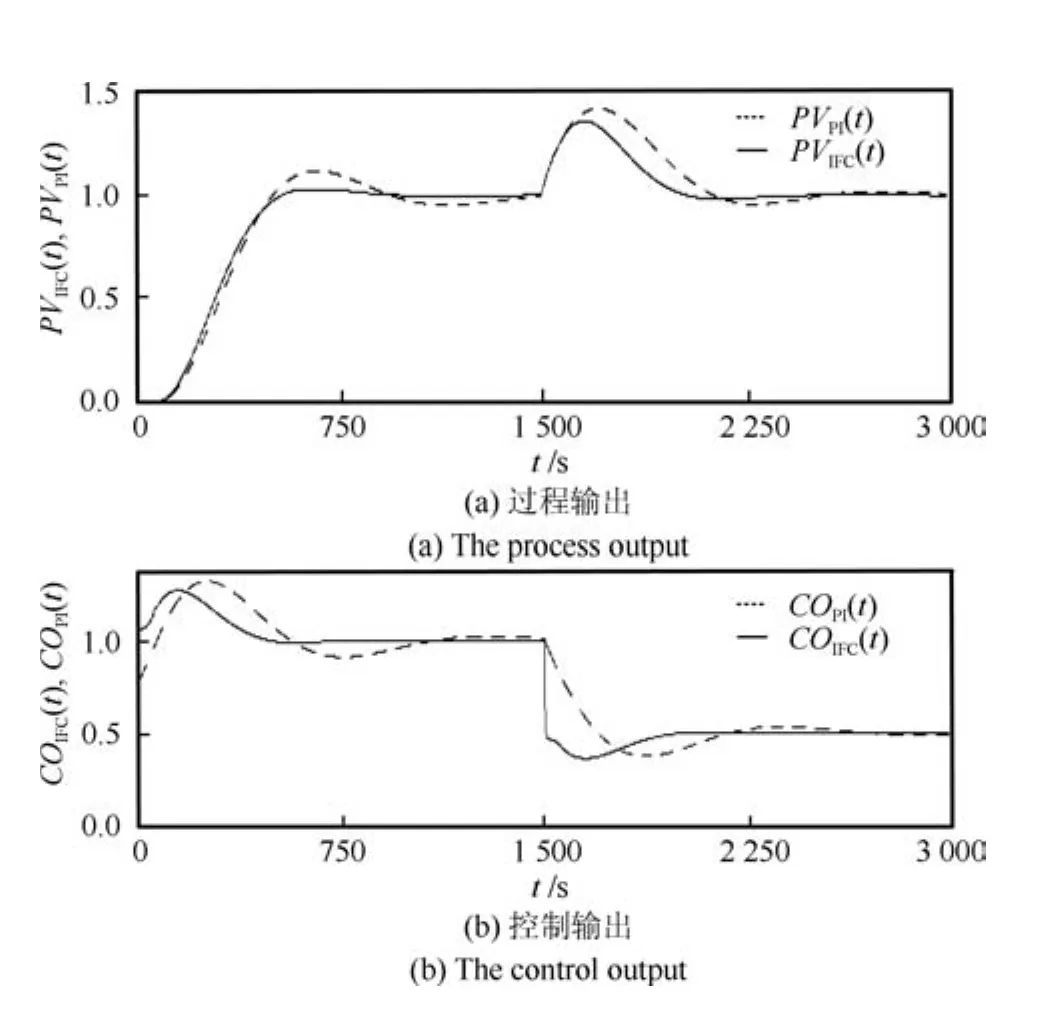
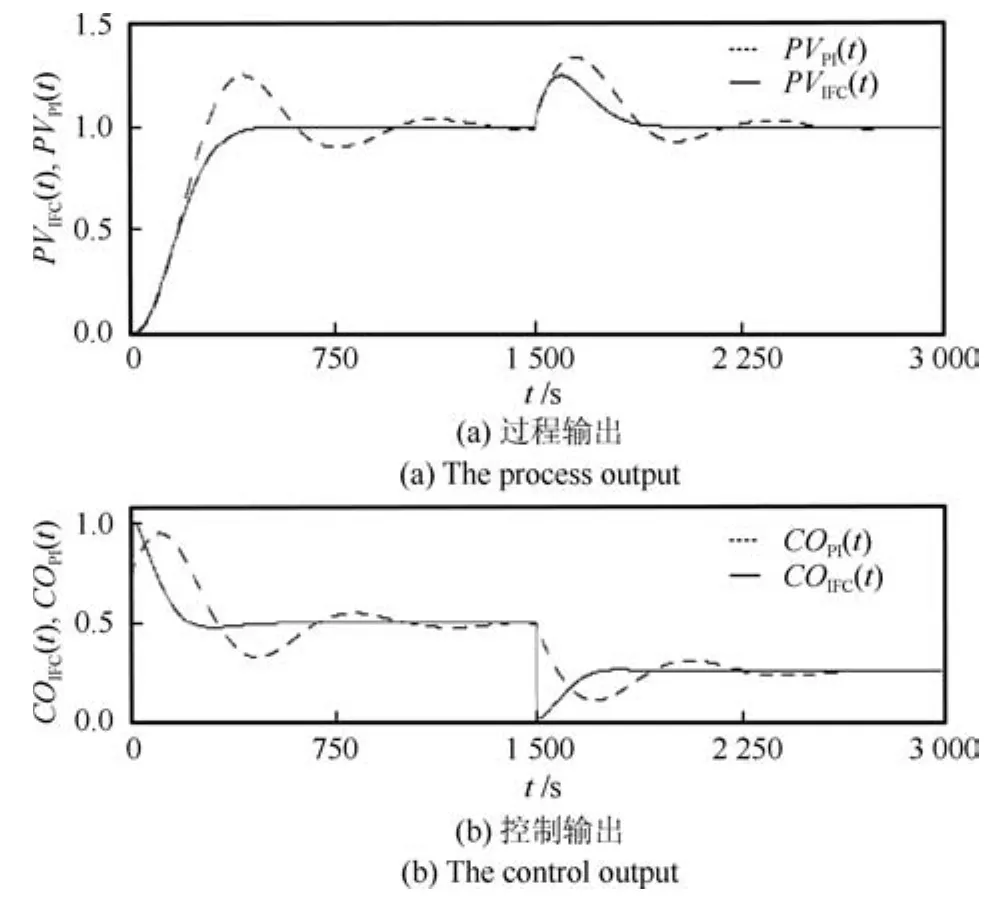

2.3 高阶惯性对象控制

2.4 正弦跟踪滤波特性
3 实际应用

4 结论
