二阶系统线性自抗扰控制的稳定性条件
2018-10-15金辉宇刘丽丽兰维瑶
金辉宇 刘丽丽 兰维瑶
自抗扰控制(Active disturbance rejection control,ADRC)[1−3]是韩京清研究员提出的一种通用控制器,具有结构简单、参数调节方便、无需精确建模等优点.线性自抗扰控制(Linear active disturbance rejection control,LADRC)[4]是ADRC的改进版本,它将ADRC中的扩张状态观测器(Extended state observer,ESO)和反馈控制改为线性,为理论研究带来便利,同时减少了待调参数数目.目前,LADRC已在机电系统、飞行控制、化工过程等领域得到广泛应用,并受到控制理论界的高度关注[5−8].
与其他方法相比,ADRC更重视低阶系统的研究,原因有二.1)ADRC强调面向控制工程实践,因而重视工程中大量存在的低阶系统.2)ADRC具有方法上的优越性,能有效处理各种未建模动态.在ADRC理论中,系统未建模动态被看作“内扰”,和外扰对应,并与外扰共同构成总扰动.通过使用ESO,ADRC能实时、准确地估计总扰动,并通过反馈加以抑制.在ADRC看来,与其费时费力地建立复杂系统的高阶模型,不如将其简化为低阶系统.控制好该低阶系统,也就能控制好原系统.
秉承ADRC的上述观点,LADRC也同样重视低阶系统,尤其是二阶系统的研究.在文献[4]中针对二阶系统提出了“控制器带宽”和“观测器带宽”的概念,并提出了确定LADRC参数的带宽法.在文献[9−10]中,发现增加观测器带宽能改善LADRC的鲁棒性,并给出了参数取值的建议范围.文献[11]从频域探讨了三阶线性扩张状态观测器(Linear extended state observer,LESO)对总扰动的估计能力和LADRC镇定二阶系统的能力.文献[12]则在分析二阶系统的基础上建议通过线性/非线性ADRC的切换来进一步改善控制效果.这些二阶系统的研究发展出LADRC的主流研究方法,并指导了成百上千的工程实践.美中不足的是,至今尚未找到LADRC镇定二阶系统的充要条件.
本文研究二阶系统的LADRC.针对无外扰和线性内扰的情况,发现LADRC可以分解成状态反馈和LESO误差两个子系统的反馈互联.扩张状态的导数既是状态反馈子系统的输出又是LESO误差子系统的输入,而LESO误差的某个线性组合则既是LESO误差子系统的输出又是状态反馈子系统的输入.在此分解的基础上导出了LADRC镇定二阶系统的充要条件,并用该条件证明了,仅使用“内扰为线性”这一信息,文献[4]的带宽法就能克服对象的参数不确定性,找到一个合适的观测器带宽保证LADRC系统稳定.
1 理论结果
1.1 问题描述和LADRC
考虑以下线性定常二阶系统

其中,x1,x2是系统状态,而u和y分别是输入和输出.系数b>0且已知,a1,a2未知但不全为0.要求设计输出反馈控制器,将状态镇定到原点.
由于系数a1,a2未知,LADRC将不确定项(−a2x1−a1x2)看做“内扰”,并引入扩张状态

再将式(1)和式(2)改写为

然后为式(3)和式(4)建立LESO

其中,k1,k2,k3是待定系数.最后再以LESO的输出构成控制器

其中,系数l1,l2待定.被控对象式(1)和式(2)、LESO(5)和控制器(6)就组成了LADRC系统.
1.2 LADRC 稳定的充要条件
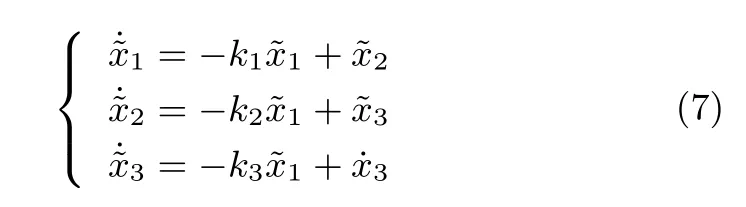
令

将控制器(6)代入(3),有
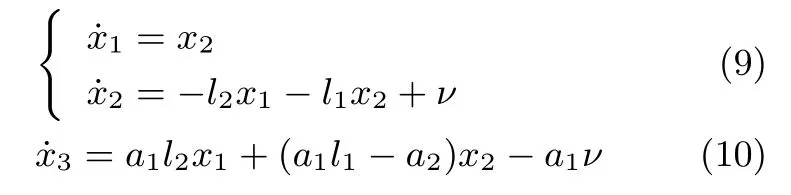
将式(9)和式(10)看做以ν为输入、以为输出的一个子系统,记该子系统为H1.同时将式(7)和式(8)看做以为输入、以ν为输出的另一个子系统,记为H2.这两个系统存在如图1所示的反馈互联结构.
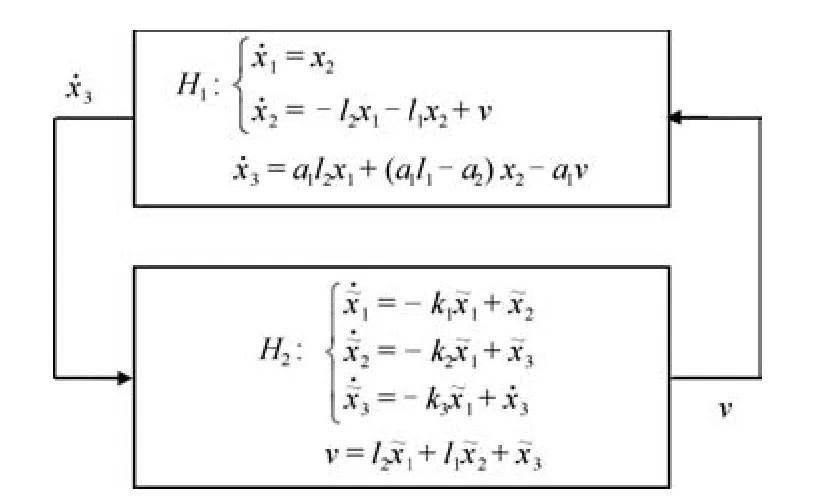
图1 LADRC的反馈互联结构,其中子系统用状态空间形式Fig.1 Feedback interconnection structure of LADRC,in which subsystems are described in state space
再考虑到H1、H2分别有传递函数

于是图1又可以画成图2的负反馈形式.
现在考虑整个LADRC系统的稳定性.约定当且仅当对象状态x1,x2和LESO误差都稳定时称原LADRC系统稳定.于是有以下定理.
定理1.由被控对象(1)和(2)、LESO(5)和控制器(6)组成的LADRC系统稳定,当且仅当图2中的负反馈系统稳定,即方程

的根都在左开半平面.
证明.图1是以为状态变量描述原LADRC系统的反馈机理,而图2又是图1的传递函数描述,三者的稳定性等价.因此,当且仅当图2系统特征方程

的根都在左开半平面时,原LADRC系统稳定.而特征方程(12)的根就是方程(11)的根.□
定理1为LADRC镇定二阶系统这一问题提供了一个古典控制的研究框架.在这一框架下,各种古典控制方法,包括罗斯判据、奈奎斯特图、波特图等,都可以用来分析和设计LADRC.既能在系数a1,a2已知或范围已知时,分析给定LADRC控制器的稳定性和稳定裕量,又能用来设计LADRC控制器的参数l1,l2,k1,k2,k3.在下一节,我们就用定理1的充分性和奈奎斯特图证明,即使a1,a2完全未知,文献[4]的带宽法也能找到一组合适的参数,保证LADRC镇定二阶系统.

图2 LADRC的反馈互联结构,其中子系统用传递函数形式Fig.2 Feedback interconnection structure of LADRC,in which subsystems are described with transfer functions
注1.由于被控对象(1)和(2)和整个LADRC系统都为线性,定理1中的稳定其实是指数稳定.
注2.定理1对被控对象状态和LESO误差的初值均未作要求.这是自然的,因为本文中的LADRC是一个线性系统,其稳定性与初值无关.考虑到对象(1)的内扰就是其总扰动,这意味着对象的总扰动及其导数都不必有界.与文献[13]假定总扰动的导数全局有界相比,这是一个改进.
1.3 带宽法有效性的新证明
文献[4]提出的带宽法建议通过调整三个正参数来镇定二阶系统.这三个参数分别是控制器带宽ωc,控制器阻尼比ξc和观测器带宽ωo.先根据对控制系统性能的要求选定ωc和ξc,然后令

再由ωo的当前取值,按照

产生余下的参数.如果得到的LADRC性能不够好,就调整ωo,直至找到一个合适的值.下面的定理表明,仅使用“内扰为线性”这一定性信息,带宽法就能找到ωo保证LADRC系统稳定.
定理 2.考虑由被控对象(1)和(2)、LESO(5)和反馈控制(6)组成的LADRC系统,假定l1,l2已按照(13)选定.那么,存在一个ω∗o,当ωo>ω∗o时,按照(14)生成的参数k1,k2,k3可以保证由(1)、(2)、(5)和(6)组成的LADRC系统稳定.
证明.因为

所以−H1(s)H2(s)的奈奎斯特曲线始于原点又终于原点.j表示虚数单位.下面我们证明存在ωo∗>0,当ωo> ωo∗时,对任意ω∈[0,+∞),有|H1(jω)H2(jω)|<1.
先考虑|H1(jω)|.因为连续性以及|H1(j0)|=0,|H1(j+∞)|=|a2|,可以断言|H1(jω)|在ω∈[0,+∞)上有界,即存在γ>0满足:

再考虑传递函数

将其中的ωo看作参数.令于是有.再令

当ωo>max{0,ωo1∗}时,有

此时由于

和

有

又因为

所以存在常数ωo2∗>0,当ωo>ωo2∗时,有


也就是说,−H1(s)H2(s)的奈奎斯特曲线的幅值始终小于1,该曲线不包围−1点.再考虑到−H1(s)H2(s)在右半平面无极点,于是图2中的反馈系统稳定.由定理1,整个LADRC系统稳定.
注3.定理2的证明过程从频域角度提出了带宽法工作原理的一种新解释.它将增大ωo看作以不等式(15)减小子系统H2的增益.当增益小到不等式(17)成立时,无论a1,a2的符号、取值如何,都能保证LADRC系统稳定,这就是带宽法和LADRC鲁棒于内扰参数不确定性的原因.这一解释为LADRC研究提供了一条处理对象不确定性的新思路,并可以推广到更复杂的情况[14].需要说明的是,不等式(17)不是稳定的必要条件,在ωo大到使它成立以前LADRC系统可能已经稳定了.
注4.定理2表明增大ωo有助于LADRC系统的稳定性和鲁棒性.但大的ωo可能导致LESO系数k2,k3和控制器输出过大,不利工程应用,实际调参时需要折中.
2 仿真算例
考虑二阶系统

用带宽法设计LADRC,取l1=2,l2=1,即

而LESO是

分析上述LADRC,可知子系统H1有传递函数

而LESO误差子系统H2有传递函数

让ωo分别等于5.0和7.0.当ωo=5.0时,特征方程(11)的根为

而当ωo=7.0时,特征方程(11)的根为

由定理1,LADRC系统在ωo=5.0时不稳定,而在ωo=7.0时稳定.
选对象状态初值 [x1,x2]=[1,−2],观测器初值,用MATLAB 2013进行仿真,结果如图3和图4.由图可知,LADRC系统在ωo=5.0时确实不稳定,而在ωo=7.0时稳定,与定理1的结论一致.
3 结论
通过将LADRC控制系统分解为状态反馈和LESO误差两个子系统,得到了LADRC镇定二阶线性系统的一个充要条件和一个充分条件.充要条件可以在系统参数已知或范围已知时,检验给定控制器能否镇定系统,还可以用来指导控制器设计.而充分条件保证了即使内扰参数完全未知,文献[4]的带宽法也能够找到合适的观测器带宽,保证LADRC镇定二阶系统.上述结果和方法有望为LADRC的稳定性和鲁棒性研究提供新的途径.

图3 系统状态和控制量Fig.3 States of the plant and the control signal

图4 LESO的误差Fig.4 Errors of LESO
