近空间高超声速飞行器输入饱和抑制模糊自适应控制
2018-10-13路坤锋张世健
路 遥,孙 友,路坤锋,张世健
(1. 北京航天自动控制研究所,北京 100854;2. 中国人民解放军第四八零一工厂虎门军械修理厂,东莞 523938)
0 引 言
近空间高超声速飞行器(Near-space Hypersonic Vehicle,NSHV)是航空工程与航天工程紧密结合的产物。它集中了传统的航空器与航天器的优点,是当前世界各主要强国广泛关注的焦点[1-2]。NSHV具有飞行包络范围大、模型高度非线性以及参数不确定等特点,这些因素为其控制器设计工作带来很大的困难[3-4]。
目前针对NSHV三通道六自由度动力学模型的控制器设计研究大都基于由美国NASA Langley中心开发的一类锥形体构型飞行器模型[5]。该模型具备一套较完整的运动方程以及气动数据,因而受到广大学者的关注。针对该类飞行器模型,文献[6]提出了一种单向辅助面滑模控制方法,并基于该方法设计了鲁棒姿态控制方案,解决了一类含时变未知干扰的飞行器姿态跟踪控制问题。文献[7]设计了一种基于扩展状态观测器的动态面姿态控制方案,该方案能够保证飞行器快速跟踪参考指令,且结构较为简单,易于工程实现。文献[8]考虑了执行机构可能的故障情况,设计了容错控制器,能够保证飞行器在出现作动器故障或舵面损坏的情况下仍具有稳定性。文献[9]针对纵向通道跟踪控制问题,设计了非奇异Terminal滑模控制器,该控制器能够保证系统具有良好的瞬态响应且跟踪误差快速收敛至足够小的区间中。文献[10]同样针对该模型的纵向通道动力学模型设计了非线性模型预测控制方法,并设计了非线性干扰观测器估计系统中的不确定干扰项,所提出的控制方案不仅能保证系统的跟踪性能,且能满足一定的优化指标。以上研究均取得了较好的跟踪控制效果,但它们都没有考虑到飞行器执行机构的饱和问题。实际中,由于NHSV飞行高度的跨越以及气动参数的不确定性均比较大,因此飞行器飞行时动态特性变化较快,容易导致控制量出现饱和的情况,这是实际工程应用中需要尽量避免的问题。控制增益的大小是影响控制量大小的关键因素[11]:选取较大的控制增益有利于提高系统的控制精度,但容易导致控制量饱和以及系统状态振荡发散等问题;而当控制增益较小时,虽然有利于避免控制量达到饱和,但不利于快速消除跟踪误差。因此,设计合理的、能够根据实际飞行情况变化的控制增益,是保证飞行器的控制量不超过幅值限制的同时实现高性能稳定飞行的关键。
本文针对含参数不确定性的NHSV三通道非线性动力学模型,研究其无动力飞行姿态跟踪控制问题。基于反步法和非奇异快速Terminal滑模控制方法设计非线性控制器,引入非线性增益函数调节固定增益控制量的大小,设计了模糊系统估计系统中干扰项的大小,并通过自适应鲁棒项补偿估计误差,保证闭环系统的跟踪性能。
1 NHSV姿态控制系统非线性模型
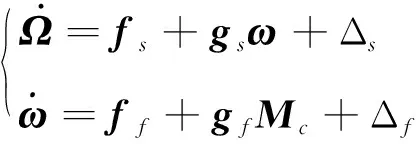
NHSV姿态控制系统的非线性模型可描述为:
(1)
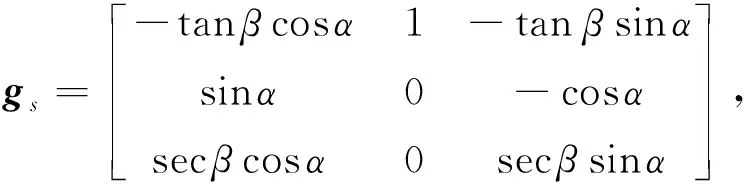
式中,Ω=[α,β,μ]T,ω=[p,q,r]T,α,β,μ分别表示飞行器的攻角、侧滑角和航迹滚转角,p,q,r分别表示滚转角速度、俯仰角速度和偏航角速度;fs=[fα,fβ,fμ]T,ff=[fp,fq,fr]T为光滑向量场,gs,gf为输入系数矩阵,飞行器无动力飞行时其具体表达式为
(tanγsinμ+tanβ)+
2 非线性模糊自适应滑模控制器设计
2.1 问题描述
本文研究NHSV的姿态跟踪控制问题。控制器的设计目标是当飞行器总体参数和气动参数存在较大偏差的情况下,控制器能够实现对姿态角参考信号Ωref的稳定跟踪控制,并具有一定的抗饱和能力。控制器设计需基于以下假设:
假设1.系统的所有状态是可测量的,参考跟踪
信号Ωref光滑连续;

控制系统结构如图1所示:

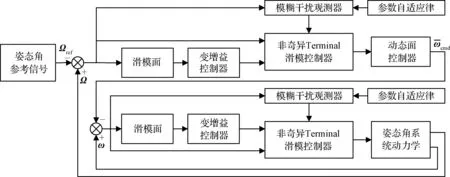
图1 控制器结构框图Fig.1 The structure diagram of the controller
2.2 非线性增益函数
为防止控制量过大引起舵面偏转饱和,本文在控制器设计中引入如下连续可导非线性增益函数[13]:
F(x,a,δ)=
(2)
式中,a>0, 0<δ≤2/a, sgn(·)表示符号函数。F(x,a,δ)具有如下性质:
性质1.F(x,a,δ)连续可导,其导数表达式为
(3)
F(x,a,δ)对于x严格单调递增。
性质2.定义
(4)
G(x,a,δ)是x的单调递增函数[13]。
取δ=0.1,当a=5和a=10时,F(x,a,δ)的曲线如下2图所示:
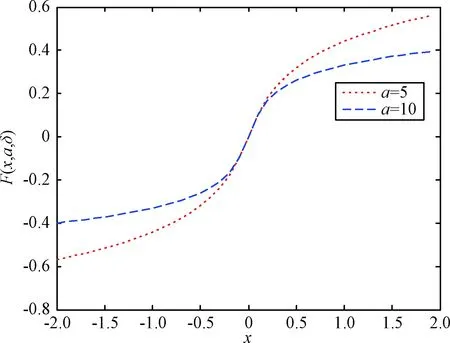
图2 δ=0.1时F(x,a,δ)曲线图Fig.2 The curve of F(x,a,δ) when δ=0.1
2.3 控制器设计的数学基础
本节介绍后文控制器设计以及稳定性分析部分使用到的引理。
引理1对于任意实数b1,b2,有如下不等式成立:
(5)
引理2对于维数相同的行向量b3和列向量b4,有如下不等式成立:
(6)

引理3[14]对于维数相同的行向量b5和列向量b6,b7,有如下等式成立:
(7)
式中,符号“*”表示Hadamard乘法运算。
引理4[14]对于维数相同的列向量b8,b9,有如下不等式成立:
(8)
引理5对于适当维数的矩阵D和列向量b10,有如下不等式成立:
(9)

引理6[15]对于任意的c>0和z∈Rm,有如下不等式成立
(10)
式中,ζ=0.2785是常数,满足ζ=e-(ζ+1)。
2.4 模糊自适应滑模控制器设计
本文基于反步法设计模糊自适应滑模控制器,具体过程为:
Step1: 定义姿态角误差量e1=Ω-Ωref,由式(1)可得:
(11)
对于干扰项Δs,通过以下模糊系统进行逼近:
(12)

(13)

选取滑模面:
(14)


(15)
式中,

(16)

(17)
(18)
式中,kθ1>0,kψ1>0,hθ1>0,hψ1>0为设计参数。
为简化虚拟控制量的求导运算,采用动态面方法获得实际的虚拟控制指令,引入如下低通滤波器:
(19)

(20)

(21)
将上式代入式(20)得
(22)

(23)
对其求导可得:
考虑以下等式和不等式:

根据引理3可得
根据引理2和引理4可得
根据以上等式和不等式可得:
再考虑以下等式和不等式:
根据引理5可得
根据引理3可得
根据引理6、引理4和式(16)可得
根据以上等式和不等式可得:
(24)

(25)
对于干扰项Δf,由以下模糊系统进行逼近:
(26)

(27)

选取滑模面:
(28)
控制律Mc设计为


(29)
(30)

(31)
(32)

(33)
参考Step 1中W1的求导过程,对W2求导可得:
(34)
为保证滑模控制律平滑,采用反正切形式的切换项arctan(·)代替饱和函数sgn(·)以削弱抖振。此时式(15)和式(29)形式的控制律改写为:

(35)
(36)
3 稳定性分析
定理1. 对于存在参数不确定的NSHV姿态动力学系统(1),存在控制器(16)~(19)、(30)~(32)、(35)、(36),使得闭环系统的姿态跟踪误差信号、自适应参数误差量以及动态面滤波器滤波误差量最终有界。
证. 考虑以下李雅普诺夫函数:
(37)
综合式(22)、(24)和(34),可得:
(38)
(39)

(G(S1))TE1Γ1G(S1)
(40)

证毕。
4 仿真校验
本章通过对比仿真实验验证所设计非线性控制器的有效性。仿真模型采用式(1)描述的三通道非线性模型。飞行器的总体和气动参数取自文献[18],飞行器的初始状态设置为:高度H0=30 km,速度V0=1500 m/s,姿态角α0=β0=μ0=1°,角速率p0=q0=r0= 0 (°)/s。参考指令设置为αcmd=5°,βcmd=μcmd=0°通过滤波器1/(s+1)。模糊自适应控制参数设置为:kθ1=10,hθ1=1,kψ1=10,hψ1=1,kθ2=15,hθ 2=1.5,kψ 2=15,hψ 2=1.5。动态面方法中一阶低通滤波器参数取τ=diag(0.02,0.02,0.02)。控制增益设置为Γ1=diag(6,6,6),Γ2=diag(15,15,15)。变增益控制参数设置为a1i=a2i=10,δ1i=0.5,δ2i=1,i=1,2,3。考虑参数不确定性的影响,仿真时飞行器的总体参数偏差取+15%,大气密度偏差取+50%,气动参数偏差取+30%。在t=5.5 s时刻加入+2°的迎角偏差干扰量。控制舵偏角的幅值约束为-20°≤δa,δe,δr≤20°。
首先进行不采用变增益策略的固定增益控制器仿真实验,即控制器中不含非线性增益函数,即将式(16)~(18)、(30)~(32)、(35)和(36)中的G(S*)用S*代替。仿真结果如图3-图4所示:
图3为姿态角跟踪曲线,图4为控制舵面偏转量曲线。可以看出,虽然系统对参考信号的跟踪性能良好,但左、右升降副翼舵控制量均出现了饱和情况。虽然未影响到闭环系统的稳定性,但这种情况在实际工程实践中仍是要尽量避免的。
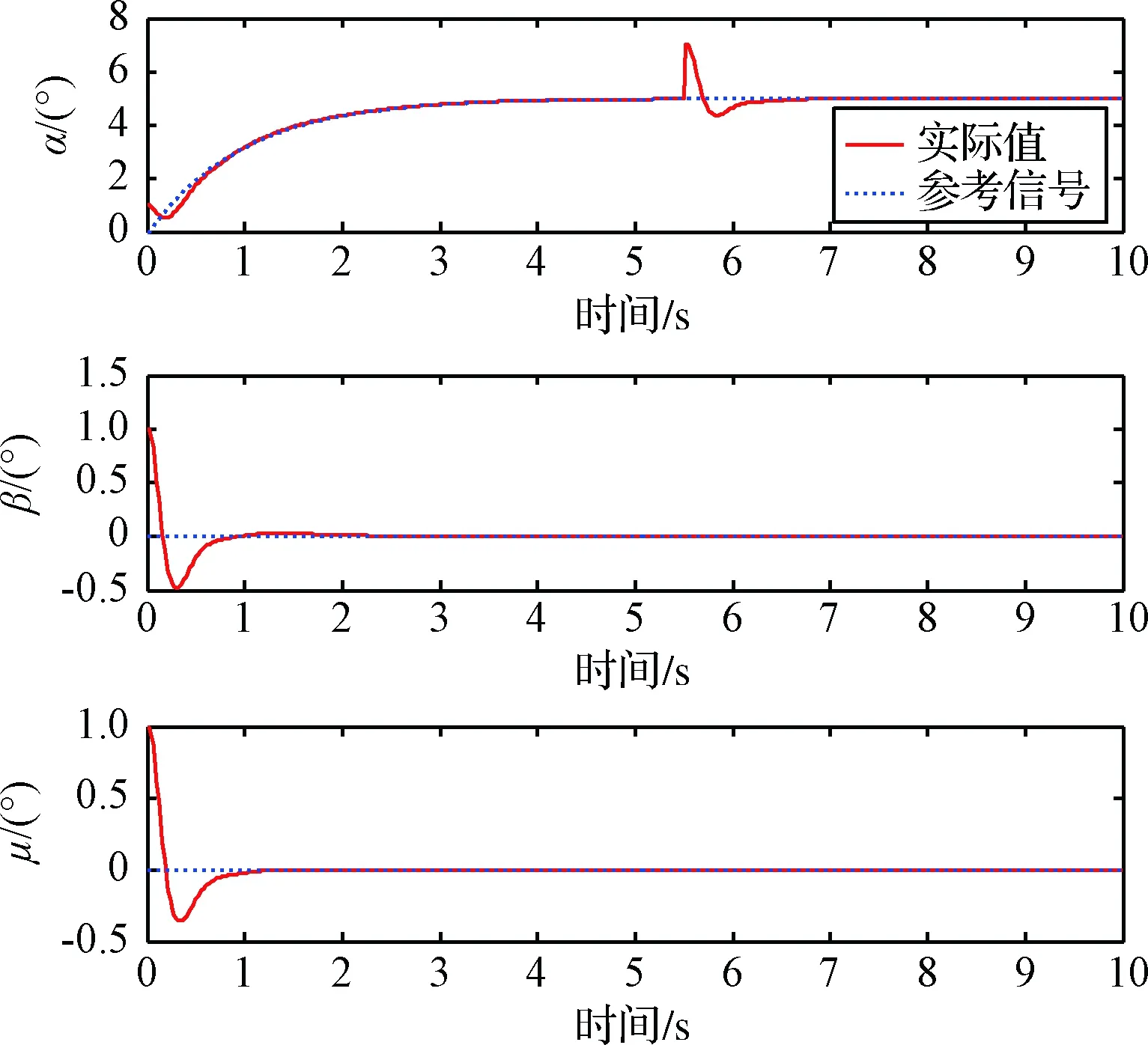
图3 固定增益策略下姿态角曲线Fig.3 The curves of attitude angles under fixed-gain strategy
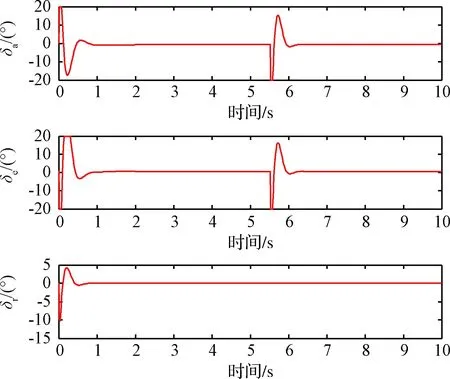
图4 固定增益策略下控制量曲线Fig.4 The curves of control variables under fixed-gain strategy
接下来进行采用变增益控制策略的控制器仿真试验,仿真结果如图5-图7所示:
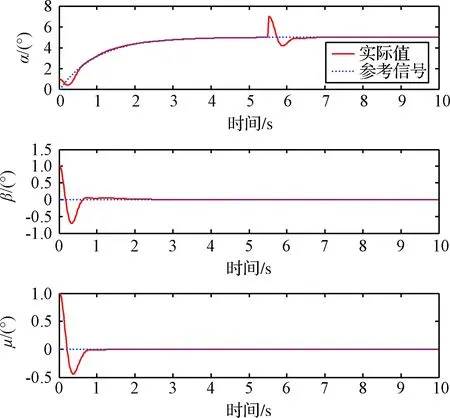
图5 变增益策略下姿态角曲线Fig.5 The curves of attitude angles under variable-gain strategy
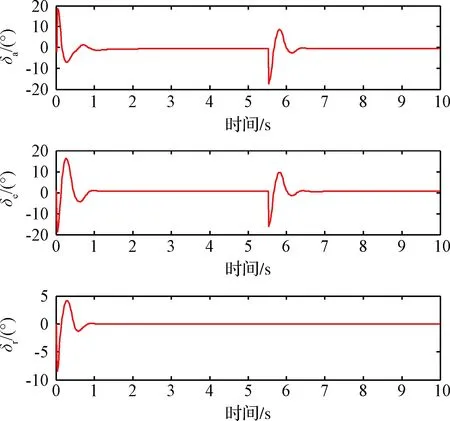
图6 变增益策略下控制量曲线Fig.6 The curves of control variables under variable-gain strategy
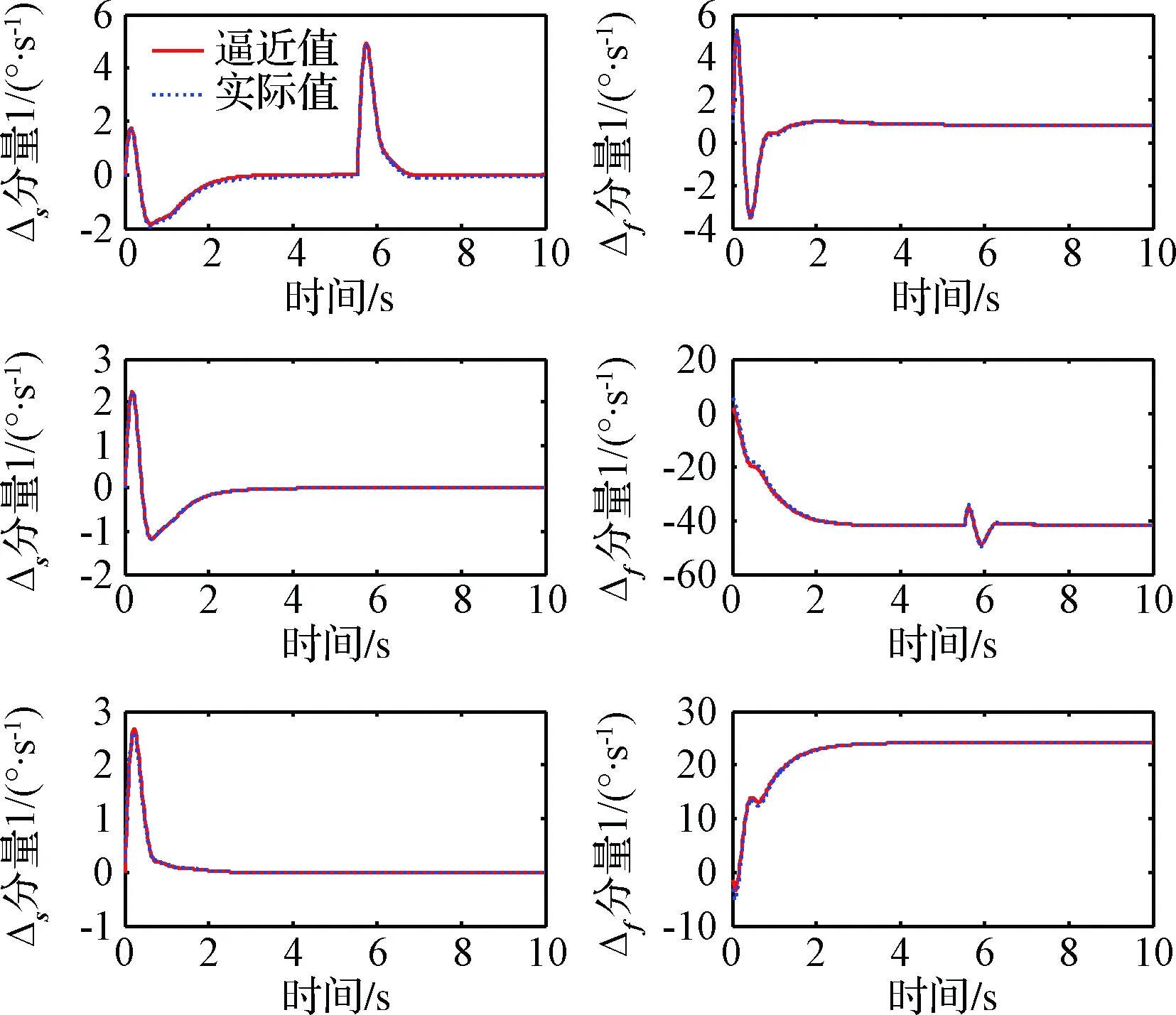
图7 干扰项Δs,Δf估计曲线Fig.7 The estimated curves of disturbance Δs,Δf
图5为姿态角跟踪曲线,图6为控制舵面偏转量曲线。将仿真结果与之前采用固定增益的控制器仿真结果相比,可以看出,两种控制器作用下系统跟踪误差相差不大,而采用变增益策略控制器的控制舵面偏转量始终未达到预先设定的临界值,说明该种方法具有一定的控制量抗饱和能力。图7为干扰项Δs, Δf的估计曲线,可以看出,所设计的模糊系统能够有效估计模型中的干扰项。
综合两组仿真实验结果可得,所设计的变增益模糊自适应滑模控制器不仅能够保证闭环系统的稳定跟踪性能,而且能够有效提高控制输入饱和抑制能力,具有更好的工程应用前景。
5 结 论
针对一类近空间高超声速飞行器的姿态跟踪控制问题,本文设计了输入饱和抑制模糊自适应控制器。该控制器能够保证飞行器在存在参数不确定性的情况下闭环系统具有稳定跟踪性能;且其中的变增益控制策略能够有效提高系统的输入饱和抑制能力。仿真实例说明了所提出方法的有效性。
