北斗卫星导航系统测量误差指标体系
2018-10-13张建军
谢 军,张建军,王 岗
(1. 北京空间飞行器总体设计部,北京100094;2. 中国空间技术研究院,北京100094;3. 中国空间技术研究院西安分院,西安710000)
0 引 言
北斗卫星导航系统是我国自主发展、独立运行的全球卫星导航系统,是我国重要的空间信息基础设施。按照“质量、安全、应用、效益”的总要求,以及“自主、开放、兼容、渐进”的发展原则,北斗卫星导航系统的发展战略和工程建设稳步推进,提供亚太地区全天候的位置、速度和时间信息,在军事和民用上显现出越来越重要的用途,其应用前景远远超出人们的想象[1-2]。
北斗系统主要包括空间星座部分、地面控制部分和用户终端部分,定位基本原理是用户同时接收不少于4颗卫星的导航信号,从而测得4个以上伪距观测量,在卫星坐标、卫星钟差和卫星不同频点间相对设备时延偏差已知的情况下,计算自己的三维坐标和钟差[3-5]。
伪距是通过将接收到的信号与接收机自身产生的信号进行比较,得到时间差或相位差,进一步计算而得到的。因此,从概念上讲,伪距是北斗卫星导航系统最基本的观测量,测量精度直接决定了系统的导航定位精度。当前,北斗卫星导航系统已成为高精度的导航定位系统,但在伪距测量仍存在一些误差源[6-10],需要全面研究和深刻理解这些误差,在北斗全球系统研制,以及未来卫星导航系统论证中有针对性的削弱这些误差影响,进一步提升系统的能力。
本文围绕北斗卫星导航系统中的伪距测量误差,全面分析了系统的测量原理,从系统误差指标体系的构建流程、原始核心指标筛选、系统误差结构设计等方面构建北斗卫星导航系统测量误差指标。结合实例,从导航卫星下行链路绝对时延的测试需求,引出了绝对时延的测试问题,根据导航卫星的特点,为了完成通道绝对时延的测试,必须确定卫星时间的零点,因此,定义星载导航任务处理单元对外1PPS信号的输出口作为卫星的时间零点,作为导航卫星下行链路绝对时延指标的测试开始,给出需要测试的绝对时延的路径组成。同时,根据每一段路径的测试误差,求出整个通道绝对时延的测量误差。
1 北斗卫星导航系统测量原理
卫星导航系统定位的原理主要是根据空间几何以及物理知识的相关原理,利用卫星在空间的分布以及卫星与地球表面之间的距离交会坐标,算出地面点的具体位置。
与地面光电测距法不同,北斗卫星导航系统实现伪距测量,原理上需要两个时钟,一个称为卫星钟,一个称为用户接收机钟(本地时钟)。由于卫星钟与用户接收机钟存在时钟误差,因而距离测量值称为伪距。为了方便分析各种误差对测量精度的影响,通常将误差源都归属于卫星的伪距参数测量中,并可以看成是伪距值的等效误差。
本文从码伪距的物理定义和梳理出来的各种误差源参数着手,围绕测量误差重新进行分析,北斗卫星导航系统信号码伪距的测量原理如图1所示。假设卫星发射信号的时刻ts称为发射时间,用户接收信号的时刻tu称为接收时间。
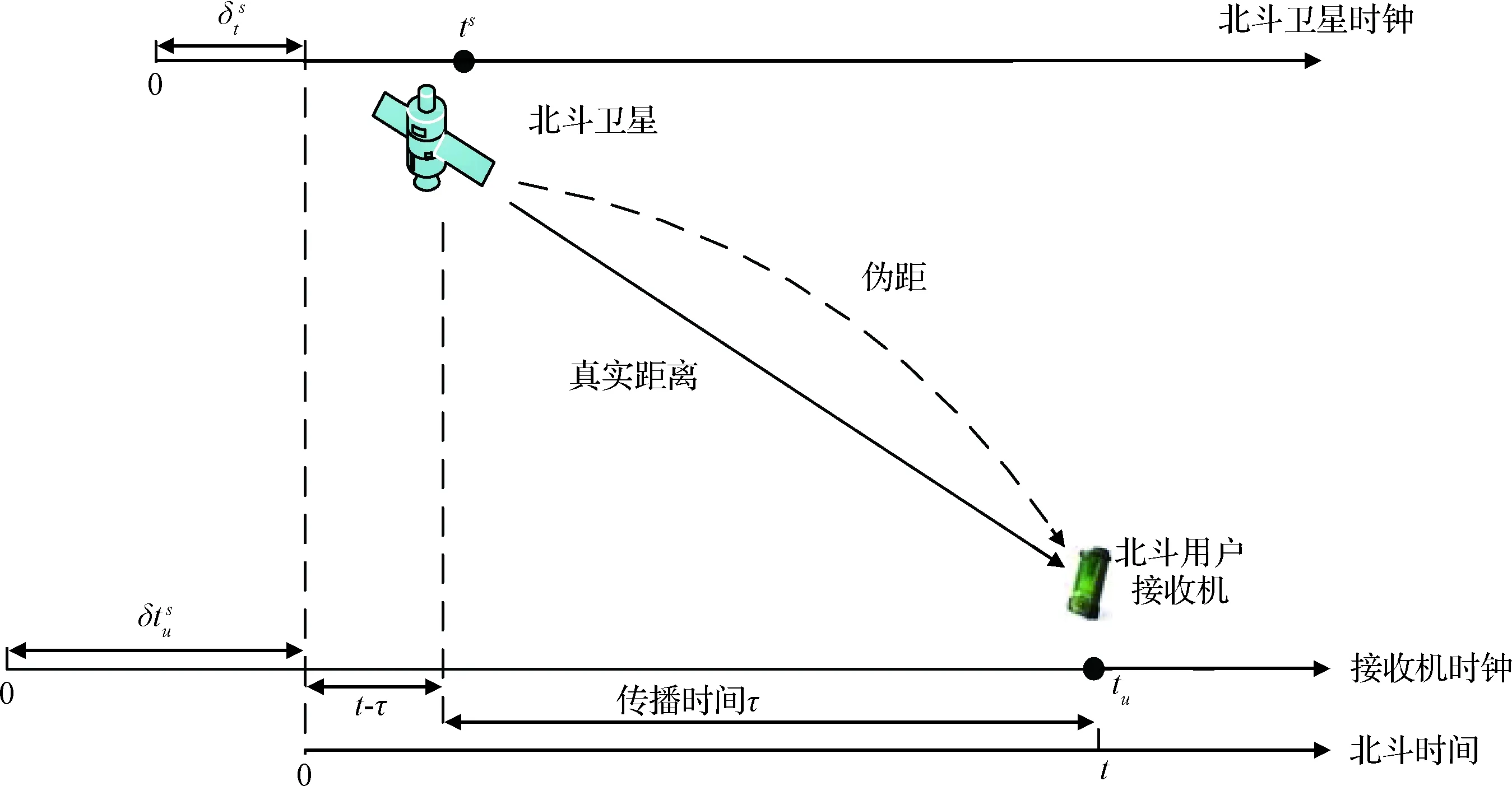
图1 北斗卫星导航系统码伪距的测量原理Fig.1 Measurement principle of Beidou satellite navigation system code pseudorange
通常,用户时钟与北斗卫星时钟不完全同步,假设北斗导航系统时间(BDT)实际上等于t,那么t时刻用户接收机时间为tu(t),并将此刻用户接收机时间和北斗导航系统时间的差值记为δtu(t),即
tu(t)=t+δtu(t)
(1)
同理,
ts(t)=t+δts(t)
(2)
伪距ρ(t)定义为信号接收时刻与发射时刻之间所经过的距离,即
ρ(t)=c(tu(t)-ts(t-τ))
(3)
其中,τ表示信号从卫星发射到接收机接收所需的实际传播时间
将式(1)代入式(3),得
ρ(t)=cτ+c(δtu(t)-δts(t-τ))
(4)
导航信号实际传播时间由两部分组成:一部分为信号传播几何距离的时间,另一部分为由大气层引起的传播延迟,即
(5)
其中,大气传播延时又可以分解成电离层延时I(t)和对流层延时T(t)两部分,将式(5)代入式(4),得
ρ(t)=r(t-τ,t)+c(δtu(t)-δts(t-τ))+
cI(t)+cT(t)+ερ(t)
(6)
式中:ρ(t)表示伪距观测值,r(t-τ,t)为卫星到接收机的真实距离,ερ(t)表示噪声误差。式(6)就是常说的伪距观测方程式,它是用户接收机利用伪距实现单点绝对定位的基本方程式。
如果北斗用户接收机能够同时接收到不少于四颗卫星,那么式(4)便可求得此时用户接收机的坐标,即可实现北斗卫星导航系统提供的定位服务,如图2所示。
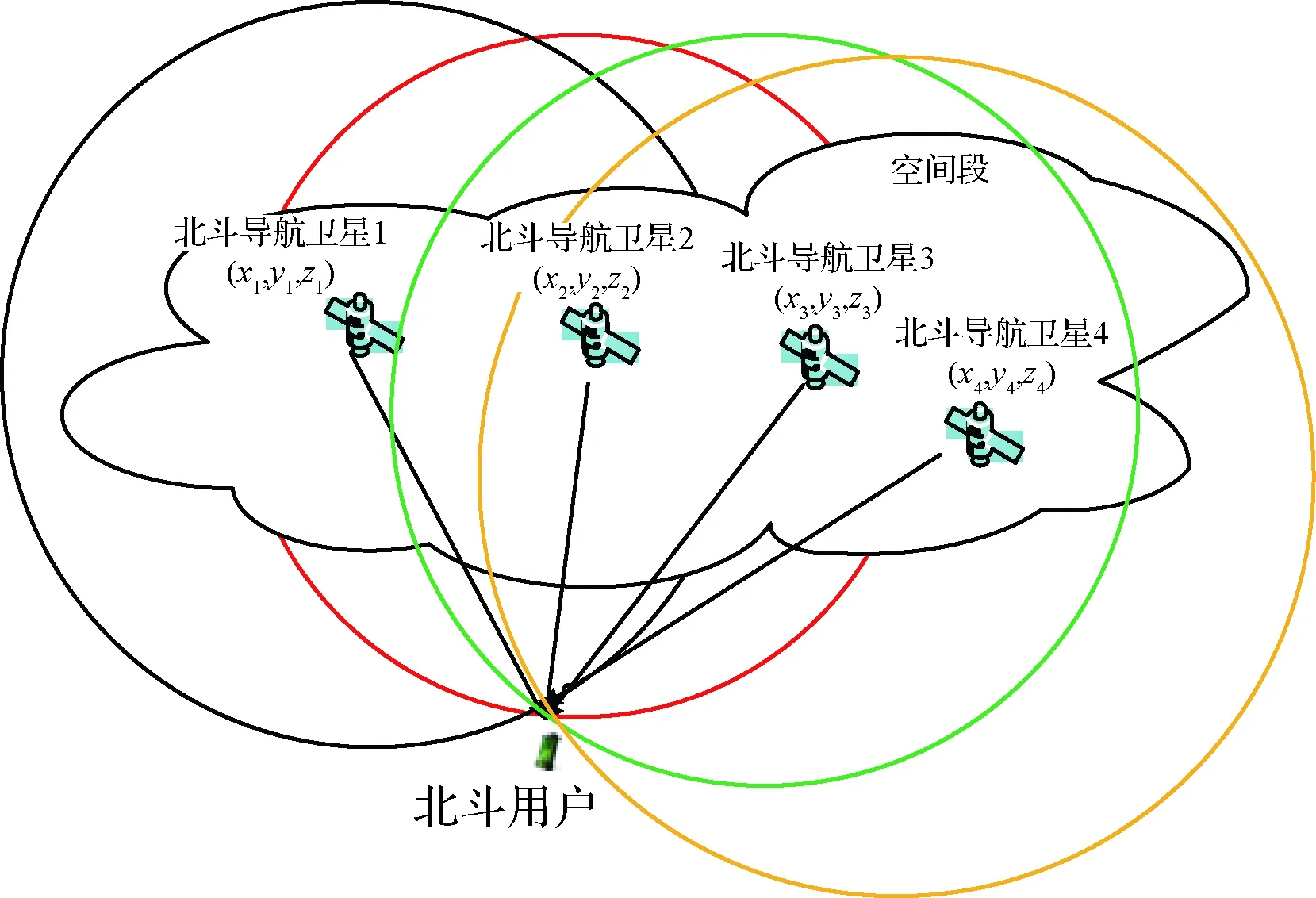
图2 北斗用户接收机实现卫星导航定位解算示意图Fig.2 Schematic diagram of satellite navigation and positioning solution by Beidou user receiver
北斗卫星导航定位是基于被动式测距原理。即北斗用户接收机终端不需要发出信号,仅被动地接收信号,测得接收机天线相位中心和北斗卫星发射天线相位中心之间的距离,进而将它和北斗卫星在轨位置进行联合解算,即可得出北斗用户接收机的三维位置坐标。
北斗卫星导航系统误差定位精度与空间位置几何精度因子和测量误差因子相关:
Mp=PDOP×Up
(7)
式中:PDOP为空间位置几何精度因子,Up为测量误差因子。
2 北斗系统测量误差指标体系设计
2.1 系统测量误差指标体系构建流程
为了精确地构建北斗卫星导航系统测量误差指标体系,需要建立一套全面严格的评估规范、评估程序、评估标准,为卫星导航系统在卫星星座、介质传播、用户接收机以及大系统地面运控和测控系统等方面提供测试依据和保障。北斗卫星导航系统测量误差指标体系构建流程包括从设计到结果确认的全过程,其过程模型如图3所示,即为指标设计→测试→评估→完善修改→确认的全过程。测量误差指标的最终确认,一般需要经过以下四个验证过程:原始核心指标的筛选、指标层次架构设计、实物模拟仿真测试和试验卫星测试。
北斗卫星导航系统伪距观测量的测量数据中包含的多种误差,按其产生的来源、性质、大小及对测量值的影响等进行原始核心指标的筛选。在构建指标层次架构设计要体现其多因素性、完整性以及科学合理性、可控可测量等特点,即在综合考虑影响北斗卫星导航系统测量误差所有因素的前提下,科学合理地选择具有代表性的各因素指标,使所选择的指标参数能够系统地、完整地反映被评价系统的误差水平。
实物模拟测试是在室内用导航信号发生模拟器和用户接收机来模拟卫星导航系统测量误差产生、接收和处理过程,实现评估测量误差的方法。试验卫星验证是通过发射试验卫星,由试验卫星播发导航信号,在地面用实际接收机来接收处理导航信号,从而验证系统测量与服务性能的方法。
在这四种验证手段中,后期的验证手段可信度更高,但验证周期也越长,资源代价较大。
卫星导航系统各个环节的实际工作环境复杂,而且有些因素是不可重复和预见的,一方面包括卫星播发信号的实际特征(如信号调制偏差和发射天线增益变化),信号在空间的传播方式(包括多径影响)和各种不同形式的RF干扰等因素;另一方面用户接收机包含不同的应用模式,其在不同的时间和地点时接收与测试特性可能有所不同。除非是在导航卫星星座实际运行中,否则北斗卫星导航系统测量误差在上述情景中是不能一一被用户接收机验证的,这自然限制了系统设计中其权衡和评价的效用。
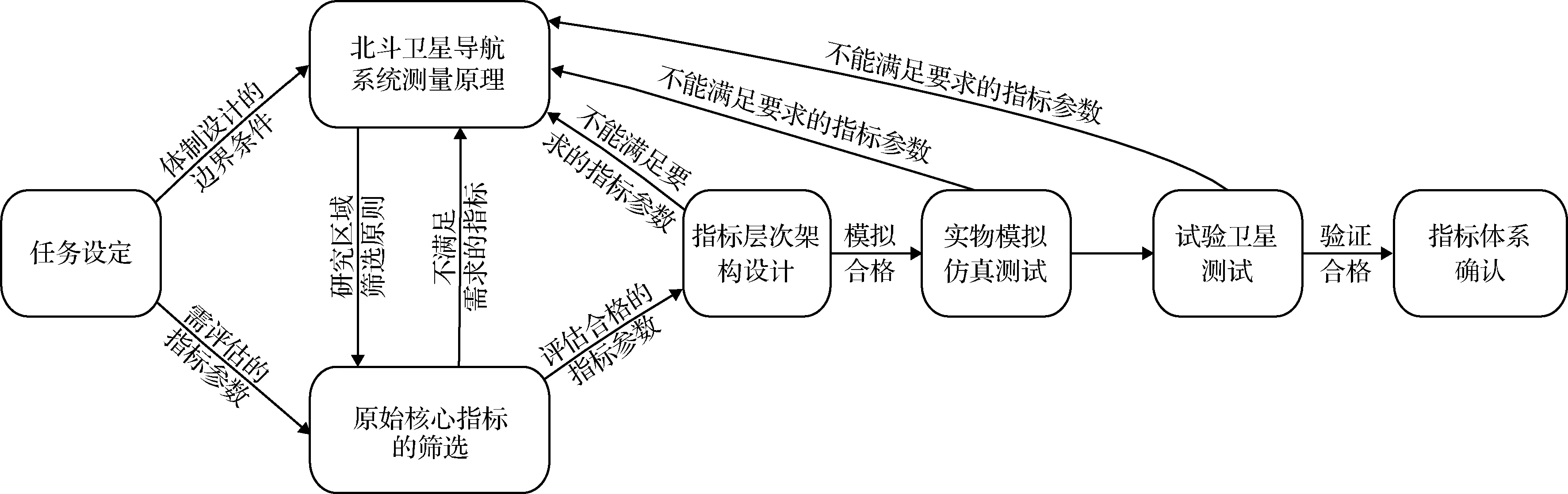
图3 北斗卫星导航系统测量误差设计到确认的过程Fig.3 The process of designing and confirming the measurement error of the Beidou satellite navigation system
在未确定最终指标和状态之前,必须按照图3构建过程,完成参数指标设计,进行测试评估,完善修改和最终确认,同时进行误差控制。一般来讲误差指标的变化都将会带来卫星导航系统产品软硬件上较大的影响,需要修改相应的设计。
因此,系统误差指标测试通常是在地面实物仿真测试的环境下进行,根据需要模拟出真实工作环境,以实现并达到科学准确的评估各项性能指标的目的。在此前提下,依据规范的测试方法,科学合理且可重复使用和各种因素影响可控制的测试场景,提供有用的设计结果。
地面试验强调在接近实际工作场景的条件下开展,指标体系的建立要在研究未来系统构建问题基础上,综合考虑系统空间段、传输段和地面段的使命任务,不同应用需求,以及使用环境等多种因素。因此,需要明确指标体系建立方法,使不同的设计人员围绕关键问题开展试验,避免设计偏差,同时试验使空间试验既能满足实战化要求,同时又能降低实现的复杂度。
2.2 系统测量误差层次分解方法
1)系统测量误差原始核心指标筛选
根据北斗卫星导航系统测量原理,依据卫星导航系统各个组成部分及其相互关系,可知伪距测量中存在着接收机钟差、卫星钟差、电离层延时、对流层延时、多径效应以及噪声干扰等误差,为了使误差分析的层次和角度保持一致,主要从卫星、信号传播介质和地面接收段等三个角度进行测量误差指标的筛选,其角度划分定义和内涵如表1所示。
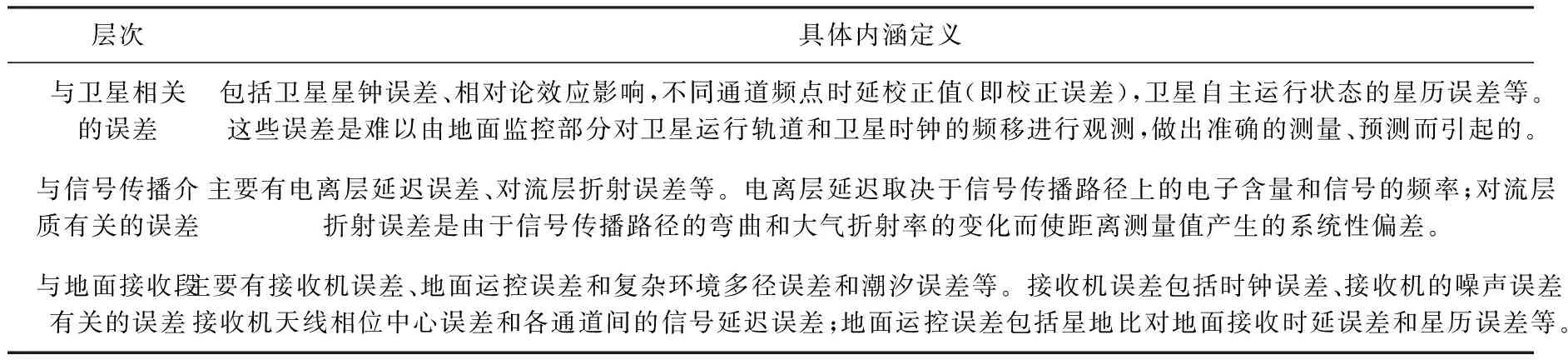
表1 北斗卫星导航系统测量误差指标筛选Table 1 Selection of measurement error indicators for Beidou satellite navigation system
2)层次分析法
层次分析法是将要评价系统的各种指标分解成若干层次,并比较同一层次的多种关联因素,为分析和预测事物的发展提供定量依据。根据层次分析法,将北斗卫星导航系统的测量误差元素分解成系统目标、准则、要素和方案等层次,在此基础之上进行定性和定量分析。把复杂系统测量误差问题表示为一个有序的递阶层次结构,层次分析结构如图4所示。最上层为系统目标层,最下层为方案层,中间有一个或几个层次为指标层,同一层的因素对上层因素有影响,同时又支配着下一层的因素。
导航卫星、信号传播环境、地面接收设备的能效状态直接反映整个系统测量误差的来源和能效水平。因此,将导航卫星、信号传播环境、地面接收设备(包括北斗用户接收机和地面运控北斗接收装置),以及上述三者(导航卫星、信号传播环境、地面接收设备)不同段耦合难以界定清楚的误差作为第2层,即作为准则层指标。
同时,卫星时延误差、卫星钟误差、其电离层、对流层,以及北斗用户接收机噪声误差、多径误差等诸多要素状况对测量误差能效有很大的影响,将其按准则层细分到第3层,即作为要素指标层,伪距偏差为导航卫星、信号传播环境和地面接收设备不同段的耦合误差,此类误差不再单独列出,逐步分解在要素层内。
3)系统误差测量指标体系层次结构根据卫星导航系统测距性能的分析,在层次分解方法基础上,结合测量误差分类,构建卫星导航系统测距性能,从纵向角度按照目标层→系统层→准则层→要素层→基础指标层等5个层次进行分类,如表2所示。
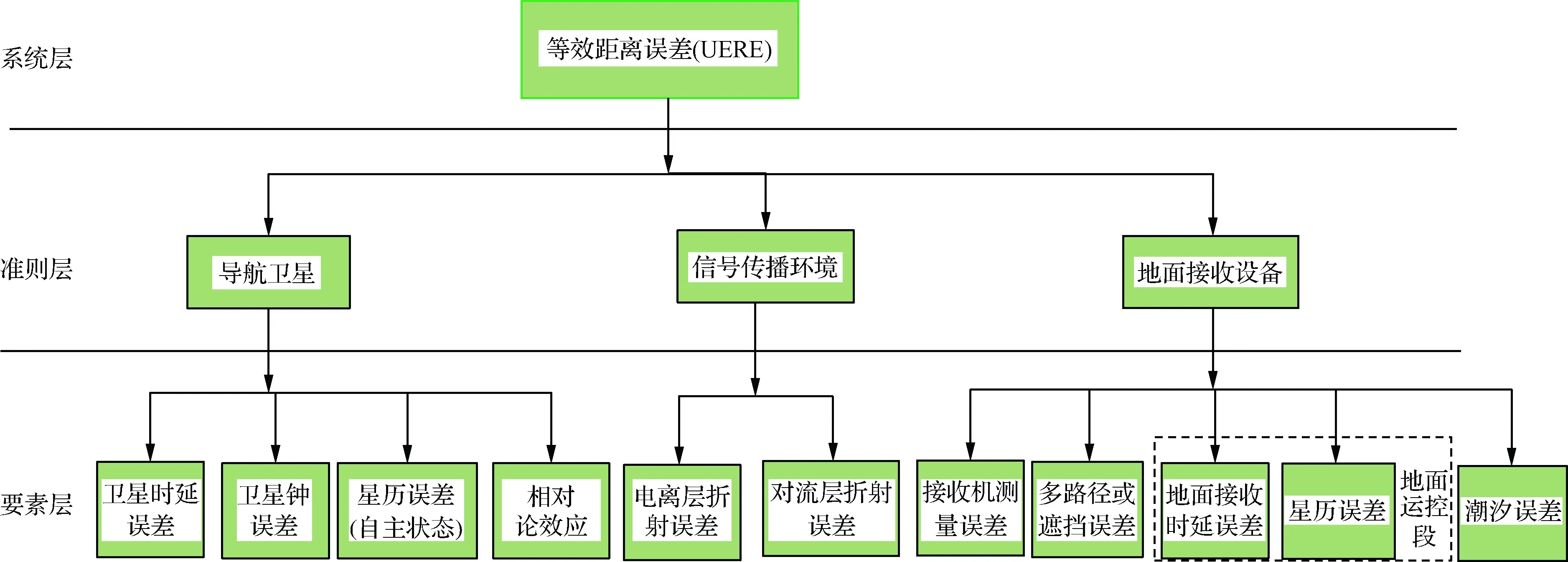
图4 层次分析法确定测量误差指标示意图Fig.4 The measurement error indicator determined by analytic hierarchy process
(1)北斗卫星导航系统测量误差指标体系构建的总体目标是通过测量误差指标体系的设计与管理,根据北斗卫星导航系统的测量原理,将工程误差的不利影响降到最低程度,实现高精度伪距测量。
(2)系统层是从北斗卫星导航系统空间段、地面控制段和用户段整体角度考虑,根据码相位伪距测量公式分析可知,实际应用中观测值不可避免的存在各种误差。为了分析与控制各种误差对观测精度的影响,假设可以将这些误差源归属到各颗卫星的伪距中,并看成是伪距值中的等效距离误差,把等效距离误差定义为全球卫星导航系统的系统层次误差。
(3)准则层表征实现预期目标所涉及的中间环节,在此从与卫星相关的误差、与信号传播介质有关的误差、与地面接收段有关的误差三个角度设计。
(4)要素层相对准则层的客观要素,每个要素包含若干具体指标。
(5)基础指标层为可解决问题的直接可度量因子,在此主要指单机设备中的主要指标参数。
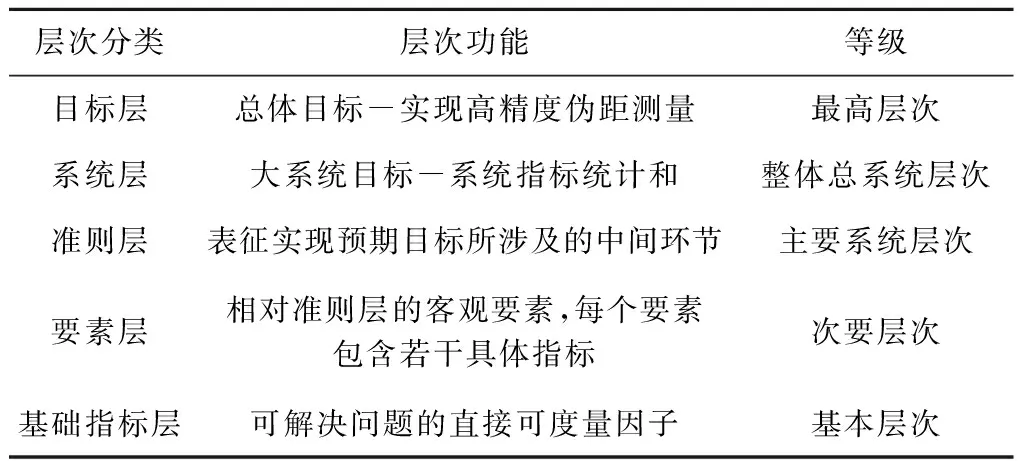
表2 北斗卫星导航系统误差测量指标体系层次结构Table 2 Hierarchy structure of Beidou satellite navigation system error measurement index system
2.3 北斗卫星导航系统测量误差指标体系构建
按照系统测量误差指标体系构建流程,结合层次分析法,北斗卫星导航系统测量误差指标体系准则层包括北斗导航卫星、信号传播环境和地面接收段三部分,北斗卫星导航系统测量误差指标体系如图5所示。
1)导航卫星的要素层主要包括卫星时延误差、卫星钟误差、星历误差和相对论效应。从卫星系统时间零点到信号变换电路输出端的时延、从信号变换电路输出端到微波调制器输出端的时延、从微波调制器输出端到功率放大器输出端时延、从功率放大器输出端到天线相位中心点时延,以及信号间误差、发射天线相位中心偏差和星地双向时间比对星上误差属于导航卫星时延误差。卫星钟误差包括星钟参数更新率、钟差预报模型精度、频率准确度、频率稳定度和频率漂移率等。星历误差主要从广播星历和精密星历两方面体现。
2)信号传播环境主要有电离层延迟误差、对流层折射误差两方面。电离层延迟误差包括码延迟、载波相位超前、多普勒频移、信号波衰减、相位闪烁效应和磁暴效应。对流层折射误差包括干燥天气附件延迟、湿润大气或水蒸气效应。
3)地面接收段分为接收机误差、多路径或遮挡误差和地面运控误差等。用户接收机测量误差包括接收机钟差和各部分电子器件的热噪声、信号量化误差、伪距测量误差、信号互相关误差、软件计算误差、接收天线相位中心偏差。地面运控系统误差包括地面接收时延误差、星历误差和潮汐误差。地面运控系统时延误差体现在星地双向时间比对地面误差,星历误差一般为地面产生的,来源为地面运控系统;如果为自主运行状态,星历误差来自星上和地面运控共同产生,潮汐误差包括固体潮、海潮和极潮对台站误差等。
图5 北斗卫星导航系统测量误差指标体系Fig.5 The measurement error index system of the Beidou satellite navigation system
3 实物模拟测试研究
导航卫星播发的导航信号,从产生、调制放大、滤波、最后从天线口面发射送出形成,供地面用户使用的单频或多频导航信号。地面利用至少4颗卫星发射的导航信号实时获取星地之间的距离,完成地面用户的定位等功能。地面接收机测得的卫星到地面之间的距离测量值包含卫星下行链路的绝对时延、星地之间距离、地面接收设备的接收通道时延。
为了得到准确的星地距离,需要从距离测量值中扣除卫星下行链路的绝对时延和地面接收设备的接收通道时延。卫星下行链路的绝对时延必须在卫星发射之前测量获取;地面接收设备的接收通道时延由地面接收设备自行获取。同时,也可以在星地距离确定已知(精度达到要求)的情况下,通过地面接收机得到卫星发射通道和地面接收通道的组合绝对时延,这样比单独测试各自时延方便许多。但是由于每颗卫星面对的地面接收设备很多,很难也不可能测试出各种组合情况下的组合时延。从地面接收机得到的组合时延中扣除地面接收设备时延和星地实际距离(可以通过激光测距得到)得到卫星下行链路的绝对时延,此种方法受电离层和对流层的影响比较大,精度难以达到纳秒级。
3.1 卫星时延零点确定
卫星下行链路的绝对时延是指从卫星系统时间基准零点到发射天线口面相位中心点的路径时延。不同卫星系统的时间基准零点的位置各不相同,有的卫星把整个卫星的基准时钟输出口作为零点,有的把下行天线相位中心点作为零点,有的把卫星下行信号对应的秒信号作为零点。在北斗导航卫星系统中,卫星时间基准零点定义为:导航任务处理单元产生的1PPS信号作为整个卫星的时间零点。
3.2下行链路绝对时延的定义及组成
在早期的导航卫星中,整个下行链路由导航任务处理单元、导航信号的信号变换、微波调制器、滤波器、功率放大器、发射天线以及它们之间的高低频电缆组成。
本文以早期的下行链路为例,分析卫星下行绝对时延的测试方法,对下行链路的时延构成,进行清晰的描述,下行发射链路绝对时延测试流程如图6所示。当前的新一代导航卫星下行链路的数字化程度得到很大提高,与图6相比微波调制器改为变频器,前端全用数字实现,时延测量采用高速采样接收机解调时标信号的原理进行标定,测试误差更小。
下行链路的绝对时延指:从卫星系统时间基准零点到下行发射天线相位中心点的信号路径时延,即从图6中的Z点到V点的时延。图6中,Z为卫星系统零点,1PPS信号输出点;S为六路导航信号的双极性输出点;T为微波QPSK调制器的信号输出点;U为行波管放过大器的输出点;V为下行发射天线相位中心点。
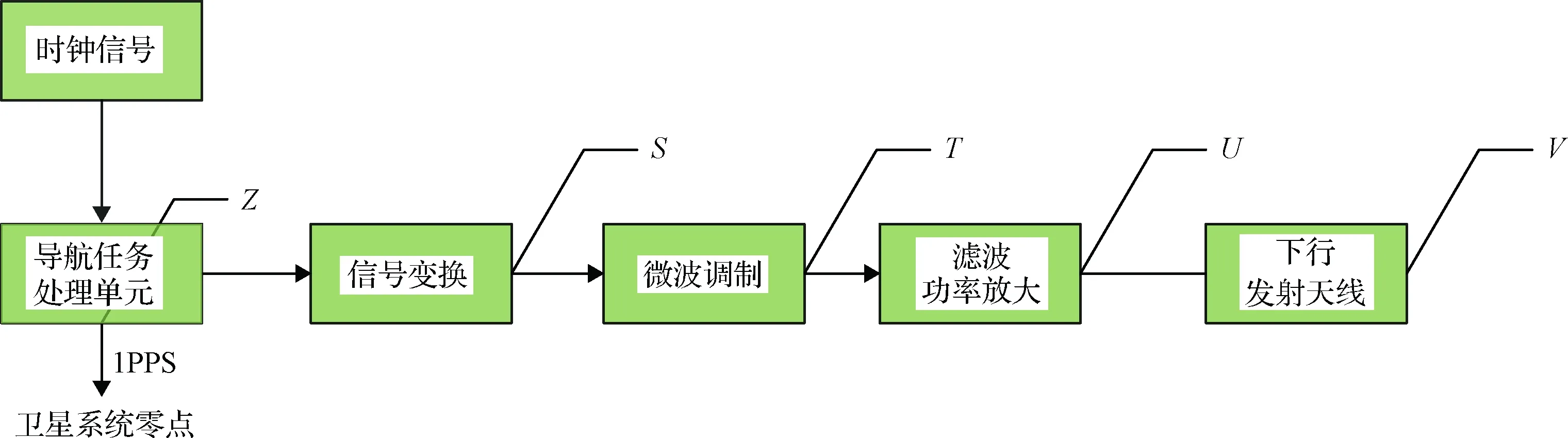
图6 下行发射链路绝对时延测试框图Fig.6 Block diagram of absolute delay for downlink transmission links
3.3 下行链路的测量方法
根据导航卫星下行链路的特点,把下行时延的绝对时延的测量组成,分为四个部分进行测量。这四部分分别为:从卫星系统时间零点到信号变换电路输出端的时延(Z→S),从极性变换电路输出端到微波调制器输出端的时延(S→T),从微波调制器输出端到功率放大器输出端时延(T→U),从功率放大器输出端到天线相位中心点时延(U→V)。
1)从卫星系统时间零点到信号变换电路输出端的时延(Z→S)
这一段的电路以数字电路为主,在信号变换电路之前,所有的信号(含1PPS信号)为3.3 V的CMOS电平,信号变换电路也是把单极性的CMOS数字信号变为双极性的数字信号。
数字信号的时延可以用数字示波器精确测量,现有的数字示波器的采样率可以到20 GHz。具体测量连接如图7所示。系统时间零值Z点1PPS信号上升沿对应的极性变换后输出的信号为导航电文的引导段巴克码(11100011010)的第一个信息所对应的在其上调制的扩频码初相(1111111111)第一位的上升沿。用示波器测量这两个信号上升沿之间的相差(扣除示波器两个探头间的零值)即为Z→S间的绝对时延,由于示波器的测量精度为(20 GHz/4):0.2 ns,示波器零值的测量精度为0.2 ns,则Z→S间的绝对时延的测量精度为:0.283 ns。
2)从信号极性变换电路输出端到微波调制器输出端的时延(S→T)
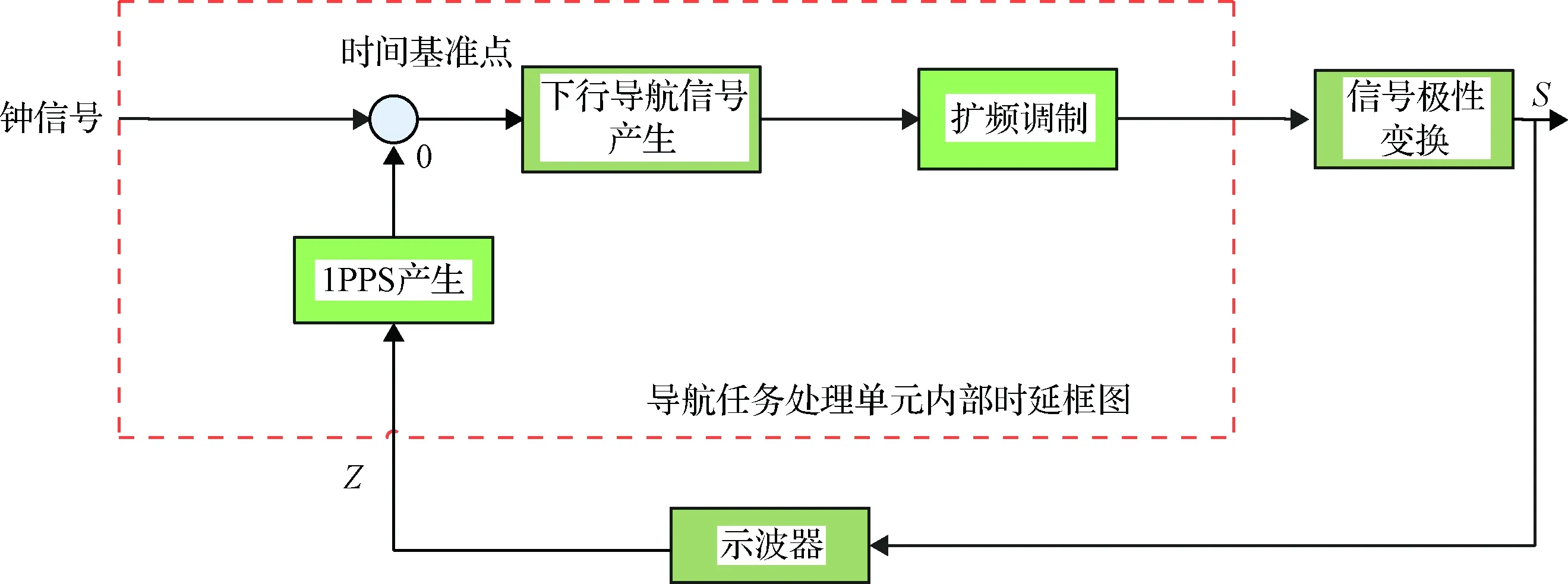
图7 Z-S间的绝对时延测试框图Fig.7 Block diagram of absolute delay between Z-S
这一段的电路以调制器为主,数字双极性信号与射频载波进行混频,产生导航卫星发送给所有用户的无线电信号。假设微波调制器为QPSK调制,I支路和Q支路的信号在混频器中所走的路径不同,因此它们在调制器中的时延也有差异,因此在测试方法中,分别单独测量I支路和Q支路的时延,调制器时延的测量方法可使用矢量网络分析仪,测量方法如图8所示。
用矢量网络分析仪测试时,I支路的信号和Q支路的信号时延分别进行测试。在作I支路测试时,Q支路的输入端加50 Ω负载,反之亦然。调制器1为上变频器,调制器2为下变频器,两个调制器采用同一种同一批次器件,测试时默认两个调制器的时延一致。用矢量网络分析仪根据各自的频点,测出:1′,2′,3′之间的时延,从1′的时延中减去2′和3′的时延除以2,即得到调制器S→T间的绝对时延,由于矢量网络分析仪的测量精度为:0.1 ns,则采用矢量网络分析仪S→T间的绝对时延的测量精度为:0.173 ns。
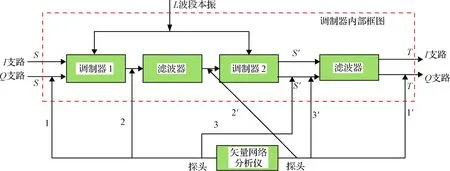
图8 矢量网络分析仪法测量S-T间的绝对时延的测试框图Fig.8 Test block diagram for measuring the absolute delay between S and T by the vector network analyzer method
3)从微波调制器输出端到功率放大器输出端时延(T→U)
这一段的电路没有频率变化环节,整个电路信号在一个频率上工作,可以用矢量网络分析仪测得整个链路的时延。测量精度为0.1 ns,
4)从功率放大器输出端到天线相位中心点时延(U→V)
这一段时延为馈电网络输入端口到天线相位中心传输所需的时延。测试时延时,测试场地需要满足天线远场测试条件,测试环境无电磁干扰(减小环境引起的时延测试误差),在测试过程中应特别注意测试电缆的连接可靠性与系统稳定性,采用力矩扳手保证每次连接的一致性。测试步骤如下:
(1)Tf为自由空间的电磁波传播时延为已知量,Tf=d/c,d为天线相位中心间的距离(可以精确测量),c为光速;T1为状态一测试的总时延;由此推算出标准天线的绝对时延Ts=(T1-Tf)/2。
(2)T2表示状态二测试的总时延;由此推算出U→V的绝对时延Ta,Ta=T2-Tf-Ts。
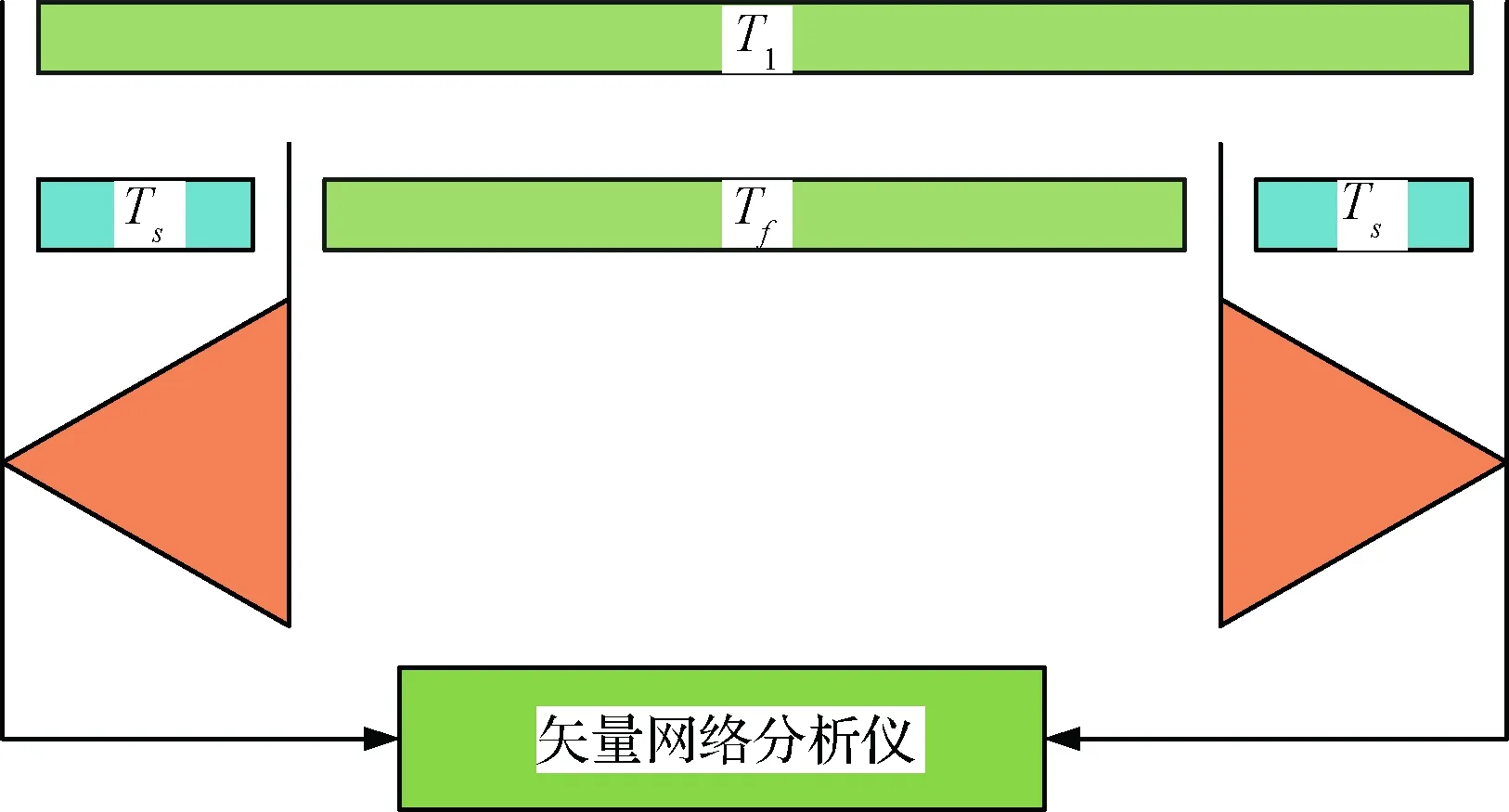
图9 天线时延测试示意图Fig.9 Antenna delay test
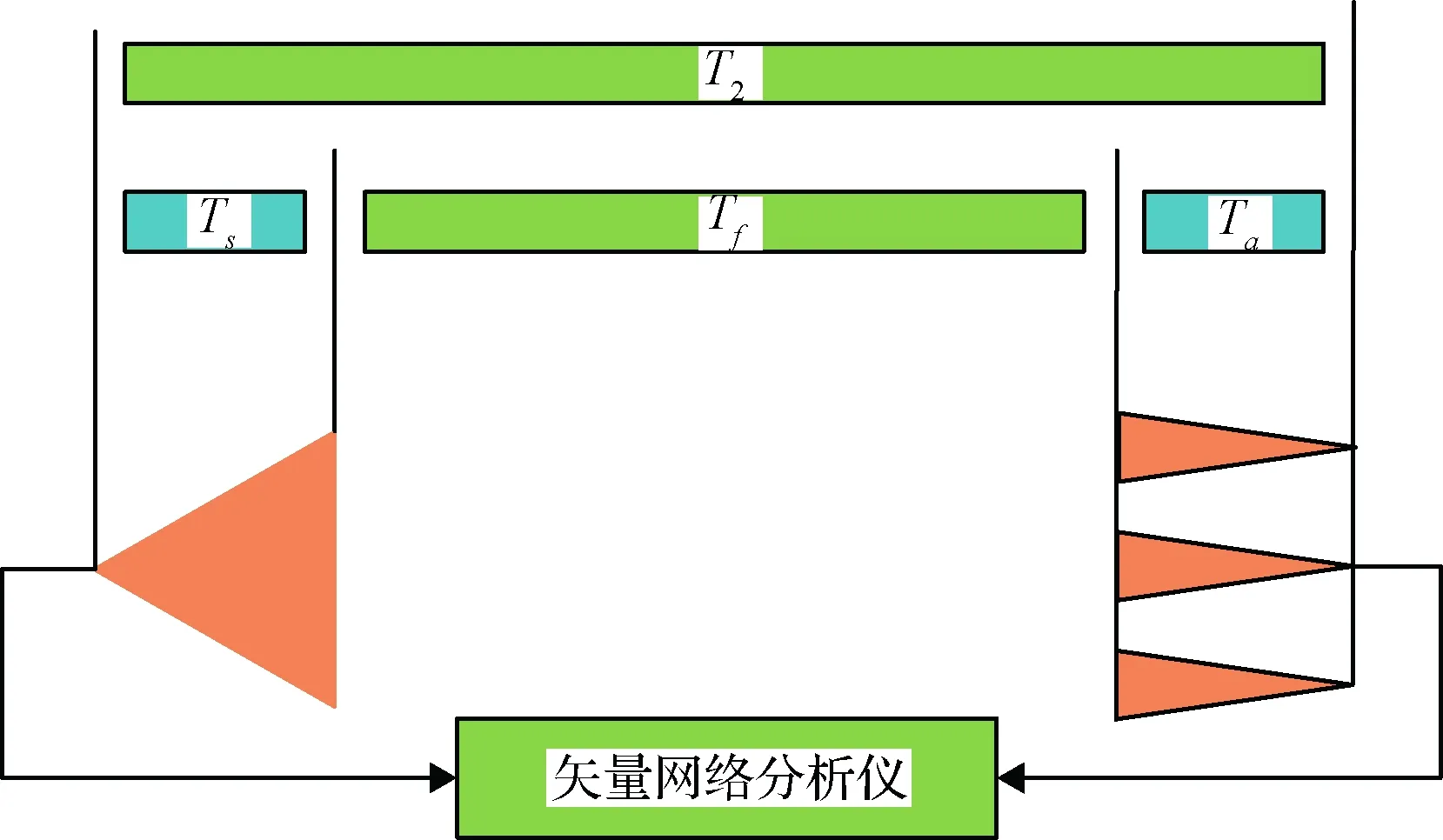
图10 天线时延测试示意图二Fig.10 Antenna delay test schematic II
采用矢量网络分析仪E8362B进行时延测试,时延测试精度见表3。
对于L频段信号,矢量网络分析仪相位测量随温度变化约为±0.2°/℃,测试带宽为4 MHz时,时延测试随温度变化根据±0.2°/[360×带宽(Hz)],计算约为0.14 ns。
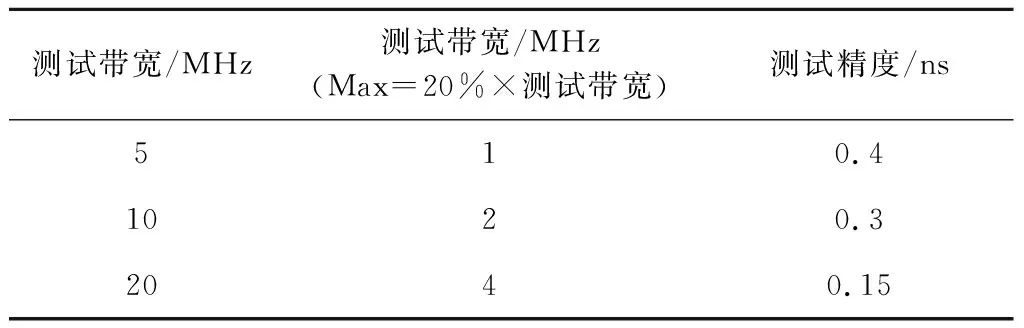
表3 时延测试精度Table 3 Delay test accuracy
5)下行时延测量精度分析
把测得的上述四段时延值方差平方相加、开根号计算,其结果即为导航信号下行链路的绝对时延。20 G示波器测试的为小数部分,一般示波器测试的为整数部分,为1/10.23 MHz的整数倍(见图11)。示波器的通道1测试结果为1PPS,通道2测试结果为巴格码的上升沿,时间差值为1/10.23 M。数字开关矩阵对数字信号的延迟为:2*1/10.23 M。信号波形同上,为输入和输出巴克码上升沿的时间差。
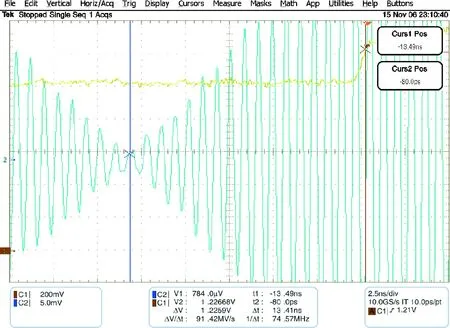
图11 20 G示波器测试示意图Fig.11 20 G oscilloscope test schematic
20 G示波器测试的为小数部分是整个测试方法的主要误差来源,在实际的测试中:加上天线的测量误差。此测试方法的测试精度为:0.374 ns。
4 结 论
在卫星导航系统的系统设计中,需要根据系统的服务精度要求,对各项误差进行反复的调整并仿真计算系统定位精度,最终给出在满足精度指标条件下符合当前技术发展水平的各项误差的指标分配,并以此指导工程研制过程中各环节的误差控制。由于在卫星导航系统的各组成部分中,测量误差大小直接影响着卫星导航定位的精度,指标关系的复杂性和交叉性影响制约定量分析测量误差指标关系。本文围绕约束卫星导航系统测量性能实现的指标要素,提出系统误差指标体系的构建流程,构建基于误差层次分解方法的北斗卫星导航系统测量误差指标体系,在下一步的研究工作中,拟结合系统实施情况,对指标体系合理性进一步深化论证,为卫星导航系统未来发展提供更为方便的支撑作用。
