A Situation-Aware Collision Avoidance Strategy for Car-Following
2018-09-28LiLiFellowIEEEXinyuPengFeiYueWangFellowIEEEDongpuCaoMemberIEEEandLingxiLiSeniorMemberIEEE
Li Li,Fellow,IEEE,Xinyu Peng,Fei-Yue Wang,Fellow,IEEE,Dongpu Cao,Member,IEEE,and Lingxi Li,Senior Member,IEEE
Abstract—In this paper,we discuss how to develop an appropriate collision avoidance strategy for car-following.This strategy aims to keep a good balance between traffic safety and efficiency while also taking into consideration the unavoidable uncertainty of position/speed perception/measurement of vehicles and other drivers.Both theoretical analysis and numerical testing results are provided to show the effectiveness of the proposed strategy.
I.INTRODUCTION
COLLISION avoidance is a basic function of advanced driver assistant systems(ADAS)and automated vehicles[1],[2].Different collision avoidance strategies have been designed over the last 30 years.However,no strategy is currently guaranteed to be collision free due to several difficulties in producing these strategies.
In many situations,driving safety and traffic efficiency do not coincide with each other.If we want to ensure 100%collision-free conditions,the gaps between two consecutive vehicles should be sufficiently large.However,to increase traffic efficiency,we are required to reduce the gap between vehicles.So,we need to design appropriate strategies to handle such a dilemma.
Unidealposition/speed perception/measurementneeds to be considered too.The failure probability of the derived strategy should also be estimated in advance.
Recently,researchers in Mobileye proposed a new concept of Responsibility-Sensitive Safety(RSS)to derive the collision avoidance condition for automated vehicles[3].Different driving scenarios,including car-following and ramp merging,were analyzed.Specially,the collision avoidance condition for car-following scenarios are quite similarto the classic collision avoidance car-following model NETSIM which was originally released in 1971 and was updated in late 1970s[4]-[6].However,NETSIM model does not well consider traffic efficiency and received less attention in the new century[7].
Following these ideas,we focus on car-following scenario and discuss how to design a more efficientcollision avoidance strategy to solve the aforementioned problems.We summarize the assumptions made in different papers for these problems and propose a more reasonable multi-state collision avoidance strategy which allows us to cope with uncertainty in position/speed perception/measurement of vehicles.Both theoreticalanalysis and numericaltesting results are provided to show the effectiveness of the proposed strategy.
The rest of this paper is arranged as follows.Section II presents the problem and reviews the RSS strategy.Section III proposed the new strategy and give theoretical comparison analysis.Section IV provides numericalstudy results.Finally,Section V concludes the paper.
II.PROBLEM PRESENTATION AND THE RSS STRATEGY
The nomenclatures used in this paper are given in Table I and are also illustrated in Fig.1.

TABLE I THE NOMENCLATURE LIST
In[3],the following collision avoidance rule is set as follows.

Fig.1. An illustration of the car-following scenarios.
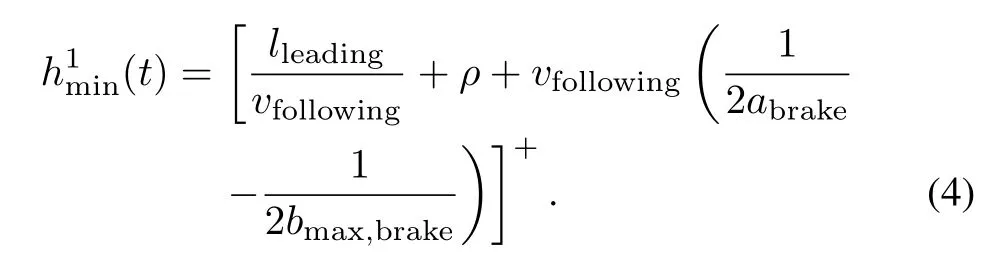
Lemma 1:Suppose two consecutive vehicles are moving on the same lane in the same direction.The minimal safe longitudinalgap between the front-mostpointofthe following vehicle and the rear-most point of the leading vehicle should be

which means two vehicles will not collide,if the leading vehicle brake by at mostuntil a full stop,and the following vehicle accelerate by at mostusing the response timeρ,and then brake by at leastuntil a full stop.
Remark 1:Similar collision avoidance rules(e.g.the one used in NETSIM model)had been adopted in literatures and researchers directly replacewithin models[4]-[6].
Remark 2:The originalRSS modelassumes thatthe leading vehicle and the following vehicle have the same deceleration capability[3];that is,=.However,this may not be true.The maximum deceleration rates of some heavy goods vehicles are significantly smallerthan some sports cars,for example[7],[8].
Remark 3:The response timeρimplicitly characterizes the updating time interval length of the car-following models,though the two variables may be considered individually.In this paper,we assume thatthey are equal.In other words,the vehicle willcheck and possible update its ac/deceleration rate everyρseconds.
III.THE NEW COLLISION AVOIDANCE STRATEGY
A.The New Strategy
As pointed outin[7],one major shortcoming of the above collision avoidance rule is its conservation in the determination of safety gap.It was shown in[9]-[13]that human drivers keep a much smaller gap in many practical situations.
One widely used measure of empirical gap is the so called headway,which is defined as“the time,in seconds,between two successive vehicles as they pass a point on the roadway,measured from the same common feature of both vehicles”(on page 48 of[13]).In other words,we have

Fig.2 shows the distributions of empirical headway collected from the NGSIM trajectory data[14].We can see that headways kept by human drivers are usually small than 3s when driving with fast speeds.The headways kept by RSS strategy are usually much larger than empirical ones;see discussions in Section IV.
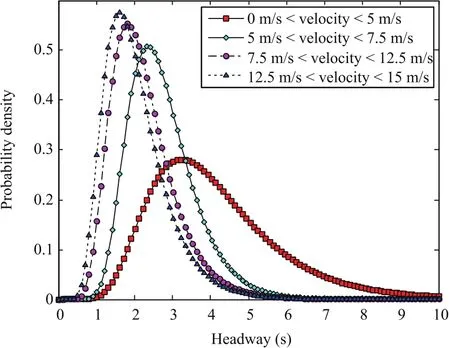
Fig.2. The smoothed empirical headway distributions collected from the NGSIM trajectory data(reproduced with courtesy from[11]).
As suggested in[6],[15],[16],one improving method for collision avoidance is to adopt multi-state rules that capture the characteristics of human drivers’car-following behaviors.
In this paper,we categorize the possible states of carfollowing into the following three kinds:
1)Following State:the following vehicle has already maintained a close gap from the leading vehicle.The speeds between two vehicles should be nearly identicalat time t;i.e.,=.There is no reason to accelerate during the time range(t,t+ρ].So,the safety gap at time t should be

Correspondingly,the safety time headway between these two vehicles can be defined and calculated as
Empirical observations indicate that human drivers tend to adopt large deceleration rate when braking if their speeds are large.As a result,the empiricalmean time headway observed for a high speed range is larger than the empirical mean time headway observed for a slow speed range[8],[12].So,in this paper,we set the deceleration rate when braking as

2)Departing State:the following vehicle slows down to departfrom the leading vehicle and usually changes lane soon after.In such situations,the following vehicle willimmediately brake with the minimum decelerating rate to complete the departure.No collision will occur if the following safety gap is satisfied at time t

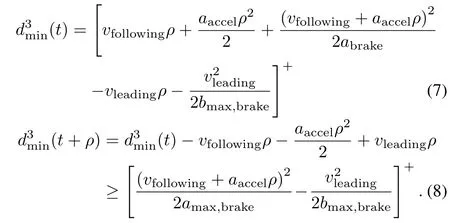
3)Approaching States:the following vehicle accelerates to catch up with the leading vehicle before itenters the Following state.This is a transition state.Empirical observations show that human drivers prefer to keep a special gap toward their leaders.When the following vehicle has a gap larger than the desired gap,it will accelerates to reduce the gap.However,differentdrivers take differentactions to reduce the gap.Some human drivers willtake a certain risk to approach their leaders by hypothesizing that the leading vehicle will not decelerate during the time range(t,t+ρ].The accelerating rate aaccelshould guarantee thatthe corresponding following safety gaps both be satisfied at time t and t+ρ
B.A Comparison between Two Models
To compare the difference between the RSS modeland the new model,we discuss three kinds of states respectively.
1)Following State.We obtain that

2)Departing State.We obtain that
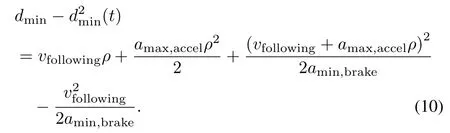
3)Approaching State.We obtain that

Clearly,the safety gap required by the new model will be smaller than that required by the original RSS model.This is mainly because the new model further analyzes the driving scenarios and make more reasonable assumptions.In the following Section IV,we will numerically show that the new model helps to improve traffic efficiency noticeably.
C.Considering Uncertainty
The major uncertainty of collision avoidance problems lie in the incorrectposition/speed perception/measurement.Here,we can divide the uncertainty into two groups.
First,the underestimate of the maximum deceleration rate of the leading vehicle and the overestimate of the speed of the leading vehicle may lead to an increase of desired safety gap.To solve this problem,we can replacebyin the above calculations with a pre-selected scale coefficient λ1< 1,and replacebyin the above calculations with a pre-selected scale coefficientλ2> 1.
Second,the underestimate of an existing gap may lead to an increase in the desired safety gap.As suggested in[17],we can directly add a positive coefficientµto the calculated minimal safe gap to counteract the effect.
IV.NUMERICAL TESTING RESULTS
To check the difference between the RSS modeland the new model,we design the following two experiments.Particularly,we set a max,accel=a max,brake=b max,brake=2 m/s2,=2 m/s2,ρ=1 s,=30 m/s,=5 m in the rest tests.
The first experiment calculates the required safety gaps by different models,when two vehicles are already in following state.Here,we setλ1=0.95,λ2=1.05,µ =5 m.
As shown in Fig.3(a),the original RSS model requires much larger safety gaps then the new model when the speed is large,even when the uncertainty of position/speed measurement are considered.Fig.3(b)shows that the resulting headways when we apply the RSS model and the new model.Noticing that flow rate is reciprocal to the headway,the road capacity could be boosted when we use the new modelinstead of the RSS model.
The second experimentsimulates a specialapproaching case for two vehicles.The speed of the leading vehicle is kept as 15 m/s.The initial speed of the following vehicle is set as 30 m/s and the initialgap is setas 550 m.We use the following rules to adjust the speed of the following vehicle for both the RSS model and the new model.
If the current gap is larger than the require safety gap,we accelerate according to the following rules

Otherwise,we decelerate by

Fig.4 shows the trajectories of the following vehicle obtained from different models,and the trajectories of virtual vehicles which are assumed to follow the leading vehicle(with ideal safety gaps calculated by different models)from the beginning.We can see that the new model can make the following vehicle quickly approach the leading vehicle and appropriately switch from Approaching State to Following State.
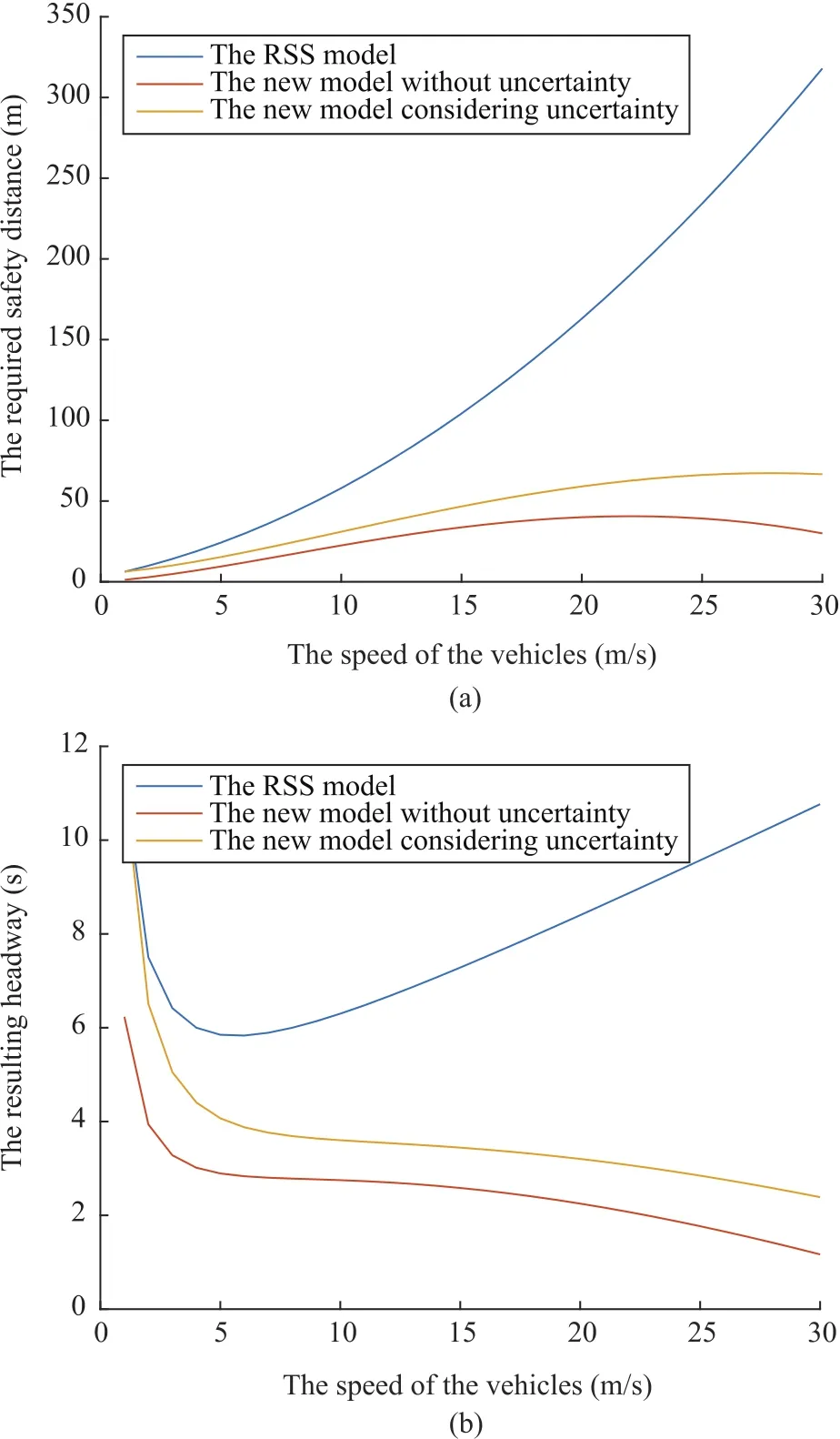
Fig.3. An illustration of(a)the required safety gaps and(b)the resulting headways by different models for following state.

Fig.4. The trajectories of the following vehicle calculated by different models for a special approaching case.
The RSS model is too conservative and leaves a larger gap than needed.The safety gap required by the RSS model is 104.25 m;while the safety gap required by the new model is 33.75 m.Since the speed is setas 15 m/s,the flow rate derived by the RSS model is around 518 veh/hour and the flow rate derived by the new model is 1600 veh/hour(which is over 3 times larger than 518 veh/hour).Thus,we can conclude that the conservation property of the RSS model leads to a significant waste of limited road capacity.
V.CONCLUSION
In this paper,we propose a new collision avoidance strategy for car-following,aiming to keep a good balance between traffic safety and efficiency.We discuss how to handle the unavoidable uncertainty of vehicles’position/speed perception in decision.Theoretical analysis and numerical tests show that a better categorization of the driving state could help reduce the required safety gap and thus make a better of road resources.
It should be pointed out that researchers show increasing interests in cooperatively organization of vehicles’movements[17]-[20].The required safety gap can be further reduced in such settings.
杂志排行

IEEE/CAA Journal of Automatica Sinica的其它文章
- Iterative Learning Control With Incomplete Information:A Survey
- Fundamental Issues in Networked Control Systems
- Adaptive Neural Network-Based Control for a Class of Nonlinear Pure-Feedback Systems With Time-Varying Full State Constraints
- A Dynamic Road Incident Information Delivery Strategy to Reduce Urban Traffic Congestion
- Feed-Forward Active Noise Control System Using Microphone Array
- Energy Efficient Predictive Control for Vapor Compression Refrigeration Cycle Systems