Feed-Forward Active Noise Control System Using Microphone Array
2018-09-28LichuanLiuSeniorMemberIEEEYangLiandSenKuoSeniorMemberIEEE
Lichuan Liu,Senior Member,IEEE,Yang Li,and Sen M.Kuo,Senior Member,IEEE
Abstract—Feedforward active noise control(ANC)system are widely used to reduce the wide-band noise in different application.In feedforward ANC systems,when the noise source is unknown,the misplacement of the reference microphone may violate the causality constraint.We present a performance analysis of the feedforward ANC system under a noncausal condition.The ANC system performance degrades when the degree ofnoncausality increases.This research applies the microphone array technique to feedforward ANC systems to solve the unknown noise source problem.The generalized cross-correlation(GCC)and steering response power(SRP)methods based on microphone array are used to estimate the noise source location.Then,the ANC system selects the proper reference microphone for a noise control algorithm.The simulation and experiment results show that the SRP method can estimate the noise source direction with 84%%%accuracy.The proposed microphone array integrated ANC system can dramatically improve the system performance.
I.INTRODUCTION
N OISE pollution becomes a pressing problem due to the developmentofindustrialapplications[1],[2].Reducing noise continues to be a challenge to maintaining and increasing the quality of life.Feedforward active noise control(ANC)systems are based on adaptive system identification,thus,are able to control both broadband and narrowband noises.Therefore,ANC systems are widely used in many practical applications,such as heating,ventilation,and air-conditioning systems[3],[4];engine exhaust systems[5],[6];and ANC headphones[7],[8].However,when the acoustic/electric delays in the ANC systems exceed the acoustic delay of the primary path,the causality constraint will be violated[9].The performance of the feedforward ANC system dramatically degrades as the degree of noncausality increases.Thus,the positions of the noise source and the reference microphone are critical for feedforward ANC system’s performance.
In some ANC applications,the noise source position is known in advance,for example,electronic mufflers.Therefore,the reference microphone can be placed atthe proper upstream position to make the ANC filter casual.However,in many other applications,the noise source is unknown or moving,such as the ANC system for infantincubators[10].The ANC system may work with a degraded performance or is unable to cancel the primary noise,as shown in Section IV.Therefore,there is an increased demand for ANC systems to estimate the noise source location or direction,then one can select the reference signalto cancelunwanted noise from unknown noise source or moving noise source environment,for example,a noisy street.
Microphone array is widely used in speech signalprocessing for speaker direction detection[11]-[15].However,the noise sound signal,especially broadband noise,is highly uncorrelated which is different from speech signal.Therefore,the conventional localization methods designed for speech signal are difficult to utilize in noise signal situations.
In this paper,we propose to integrate a microphone array technique with the feedforward ANC system.The microphone array is used to estimate the noise source location or direction by using generalized cross-correlation(GCC)and steering response power(SRP)methods[16],[17].The ANC system selects the microphone close to the noise source as the reference microphone,using the filtered-X least mean square(FXLMS)algorithm to reduce the unwanted noise level.
The paper is organized as follows,Section II presents the causality problem of the feedforward ANC system and analyzes the system performance.Section III proposes the microphone array integrated ANC system and noise source localization algorithm.Section IV shows the simulation and experiment results,and Section V concludes the paper.
II.PROBLEM STATEMENT
In the feedforward ANC system configuration illustrated in Fig.1,the primary noise is sensed by a reference microphone.The anti-noise,which is the output of the adaptive filter,is played by the secondary loudspeaker and it passes through the acoustic path,then reaches the error sensor.The acoustic delay AD1from the reference microphone to the error sensor is proportional to the distance from the reference sensor to the error sensor.AD2represents another delay between the secondary loudspeaker and the error sensor.Since the adaptive filter necessarily has a causal response,we must ensure that the acoustic delay between the reference and the error microphones is greater than the electric delay ED,plus the acoustic delay from the secondary loudspeaker[9].Thatis:AD1>AD2+E D,and this condition is called the causality constraint.When this constraint is violated,the response of the ANC system is noncausal,and hence not realizable for broadband noise control.

Fig.1.The block diagram of a single channel feedforward ANC system.
Fig.1 shows the block diagram of a single channel feedforward ANC system.The primary path P(z)models the propagation path between the reference sensor and error sensor(including AD1),while S(z)is the secondary path between the anti-noise loudspeaker and the error sensor(including a partof ED and AD2).(z)is the estimation of the secondary path’s transferfunction.In orderto analyze the causality effect,we simplify P(z)and S(z)as pure delays with their impulse response functions,p(n)=δ(n-Δp)and s(n)=δ(n-Δs).Whenτ=Δp-Δs>0,the system is causal.The Z domain signal can be expressed as

and whenτ= Δp-Δs< 0,the causality constraint is violated,therefore we have

In this case,adaptive filter W(z)works as a predicator to minimize the residual error:W(z)=zτ.
The primary broadband noise can be modeled as an autoregressive(AR)model[18],[19]

where n(n)is a white noise with 0 mean and varianceσ2,andαirepresents the constant coefficients for the AR model.
We assume thatΔp=0 without loss of generality,so the primary noise at the error sensor becomes
with w(k)as the desired coefficient for this moving average(MA)model[20].Meanwhile,the anti-noise generated from the adaptive filter W(z)is


Therefore,the MSE is related withτand the desired modelcoefficients w(k).For the same model w(k),MSE will increase while the degree of causality is increased.
There are many factors related to causality,and the most criticalone is to selectthe reference sensor thatis close to the noise source.
III.MICROPHONE ARRAY INTEGRATED ANC SYSTEM
In this section,we use an infantincubator ANC application as an example.We combine the microphone array technique with a feedforward ANC system.For an ANC application with unknown noise source/sources,The microphone array is used to estimate the noise sources’direction or location,then the proper reference sensor is selected and the ANC algorithm is conducted.
The ANC system contains K secondary sources and M error sensors,as shown in Fig.2.The microphone array contains J(J=4)microphones,and m1-m4are deployed at the edge orcorners ofthe system.The noise source location or direction is estimated by the microphone array.The reference microphone is selected based on the noise source position for conducting the FXLMS algorithm.
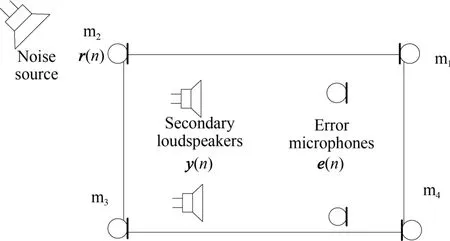
Fig.2.Integrated ANC system(m1-m4 are the sensors in the microphone array).
The primary noise is sensed by a reference microphone(m2)close to the noise source[1,2].The adaptive filters use the sensed reference signal rrr(n)=[r(n)...r(n-L+1)]Tto generate the cancelling signal yyy(n)=[y1(n) ... yk(n)]Twith K channels;which is fed to secondary loudspeakers to cancel the primary noise.The M error microphones measure the residualnoise eee(n)=[e1(n)...em(n)]Tand use them to update the filter coefficients.
The noise source direction or position can be estimated by processing the signals received by the microphone array,as shown in Fig.3.

Fig.3.Microphone array with 4 sensors.
Assume that S is a noise source with unknown coordinate(x,y,z),the noise signalis picked up by microphones:m1,...,m4simultaneously.Assume m1is at the coordinate system origin and the position of the i th microphone in the array is(xi,yi,zi)with i=2,3 and 4.Based on the geometry of the microphone array,the coherence and time difference among multiple copies of the same signal can be used to estimate the noise direction or location.
A.Noise Source Direction Detection
The time difference of arrival(TDOA)method is widely used in acoustic event localization.The TDOA estimation problem is to measure the time difference between the signals received at different microphones[11],[12].
Consider an unknown noise source S at(x,y,z),and the sound travel time between S and i th microphone is

where vsis the speed of sound,and i=1,2,3,4.
Then,the TDOA between miand m1can be expressed as

Equation set(7)contains three hyperboloid equations with three unknowns(x,y,z).By solving(7),we can obtain the position of the noise source.
1)Generalized Cross-Correlation:The generalized crosscorrelation(GCC)algorithm is one of the most popular methods for TDOA estimation[17],which is defined as the expectation of two observed signals

where F-1[·]is the inverse discrete-time Fourier transform,(f)is the cross spectrum density.v(f)is a frequencydomain weighting function,and(f)is cross-spectrum for two observed signals as

The maximum possible delay willbe given where r(k)achieves its maximum atτ=k,so the TDOA between mi(t)and mj(t)is obtained as

where k ∈ [-τmax,τmax],and the τmaxis the maximum possible delay of microphone array.
The frequency-domain weighting function v(f)is calculated straightforwardly using the norm of(f),because the TDOA information is conveyed in the phase rather than the amplitude of the cross-spectrum[15].We choose frequencydomain weighting function as

The amplitude has been normalized since it is not related with TDOA,the phase information which is used for calculating TDOA is left.Thus the GCC can be calculated efficiently.
2)Steered Response Power:In our system,since the noise signal is highly uncorrelated,the accuracy of TDOA we obtained from GCC is low.Therefore,the estimation accuracy of the GCC phase transform(PHAT)algorithm is notacceptable,as shown in Section IV.Therefore,in this subsection,we use the SRP[13],[14]algorithm to improve the estimation accuracy.
The signal picked up by the i th microphone is denoted as mi(t),the SRP of a finite signal frame is defined as[13]

where xxx is the 3-D spatial vector of noise source,ωiis the weight of signal mi(t),andτ(xxx,i)is the time delay from the noise source directly to the i th microphone.
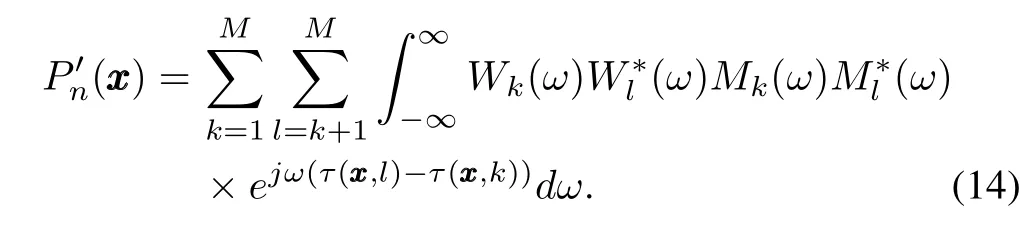
SRP can be calculated by summing the generalized crosscorrelations of all possible microphone pairs of the microphone array[13].Based on Parseval’s theorem,the totalenergy contained in a waveform mi(t)summed across all time t is equalto the totalenergy ofthe waveform’s Fourier Transform,M(f)summed across all of its frequency components f[14].We transfer(12)into frequency domain as follows[13],

where Wk(ω)and Wl(ω)are frequency-dependent weights,andτ(xxx,l)-τ(xxx,k)is the TDOA for microphones k and l.
The maximum of Pn(xxx)willbe obtained atthe noise source position xxx;
Pn(xxx)is a symmetric matrix with fixed energy terms on the diagonal[8],therefore,we only consider(xxx)which contains the lower triangular part of Pn(xxx)and changes with xxx.and changes with xxx needs to be concerned as
The TDOA information is conveyed in the phase instead of the amplitude of the cross-spectrum[11].Performing phase transform(PHAT),frequency-dependent weights choose inverse of the magnitude of the cross-spectrum as

andτ(xxx,l)-τ(xxx,k)is the TDOA for microphones k and l.
Searching in a restricted 3-D spatial area for maximum(xxx),one will get the estimated location of the noise source.The computationalcomplexity is significantly high for searching for the maximumin the whole space when the physical space is large.In order to reduce the computational complexity,a suboptimal stochastic region contraction(SRC)searching algorithm is utilized[13].
The basic idea of the SRC algorithm is,given an initial rectangular search volume containing the desired number of global optima and gradually,in an iterative process,decrease the search volume until a sufficiently small sub-volume is reached in which the optimal(xxx)is trapped[13].
Defi ne i as the iteration counter,N as the number of random points need to be evaluated in original search volume,P(P<<N)as the number of optimal points in volume Vi,as the sufficiently smallsub-volume in which the optimal(xxx)is trapped,andas the maximum numberof(xxx)evaluation allowed in sub volume Vi.The SRC algorithm is illustrated in Fig.4.

Fig.4.3-D SRC search region example.
The SRC search algorithm can be implemented by following steps:
1)For the initial iteration i= 0,in original volume V0=,randomly choose N points.
4)Contract the search region to a smaller volume with boundarywhich is determined by the locations of the biggest P points,and compute new region volume Vi.
5)If Vi<Vminstop search and find the optimum locationas:=argmaxxxx(xxx)
6)Else,calculate the mean valueµiof(xxx)for those P points,save m good points at which(xxx)> µi.
7)Continue searching for other n=P-m points in the same region B i,till sufficient n points have been found or the evaluation times for i th iteration ci<
8)i=i+1,go to Step 4.
3)Reference Microphone Selection and ANC Algorithm:In this paper,we simply choose the microphone close to the noise source as the reference microphone expressed as

Then,the FXLMS algorithm can be utilized to reduce the noise level,the secondary sources are driven by the adaptive filters output signals,

where AAAk,iis the adaptive filter matrix from i th reference microphone to k th secondary source.
The error signal vector measured by the error microphones is

where ddd(n)is the primary noise vector and yyy′(n)is the canceling signal vector at the error sensors.

whereµis the step size,

and SSS(n)is the secondary paths matrix among the secondary loudspeakers and error microphones.
IV.CASE STUDY AND EXPERIMENT RESULTS
In this paper,an ANC application for an infantincubator is used as an example of the proposed integrated system.In this system,the microphone array consists of four omnidirectional microphones and is placed at the four corners outside of incubator,as shown in Fig.5.Recorded neonatalintensive care unit(NICU)noise is used as the noise source is played by a loudspeaker.The TASCAM HS-P82 multi-track recorder is used to record the 4-channel noise signals from the 4 microphones,sampling frequency is 48 kH,which is down sampled to 6.4 kHz.

Fig.5. The experimental set up of noise source direction detection.

Fig.6.Searching result(2-D)for maximum.
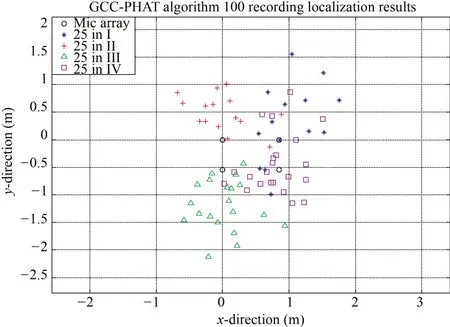
Fig.7.Estimation of 100 noise source positions by using GCC-PHAT method.
The position of microphone m2is assigned as the origin of the coordinate system,and the microphone array locates at[(0.85,0,0);(0,0,0);(0,-0.55,0);(0.85,-0.55,0)].In every quadrant,we randomly change noise source location 25 times and record 4-channel synchronous signals.These recorded signals are processed using GCC-PHAT and SRPPHAT algorithms.
Fig.6 shows 2-D searching result for maximum(xxx).It is shown that the SRP achieves the highest value at the noise source position.The location of peak SRP’s value is the position of the noise source.
In each quadrant,the estimated position for unknown noise sources are plotted in 2-D plane using different color marks as shown in Fig.7.We find that 16 points are misestimated.For example,some green points fall in quadrant IV and some estimated locations of the noise sources are inside the range of the microphone array.
The detailed localization estimation results of the GCCPHAT algorithm are tabulated in Table I.In the computer simulation,29 of 100 recordings have no realsolutions which are indicated as N/A in the table,and 55 outof 71 estimated noise source points are in the rightquadrantas highlighted in shaded cells of Table I.The correct rate of noise source localization using GCC algorithm is 55%and it is not acceptable.
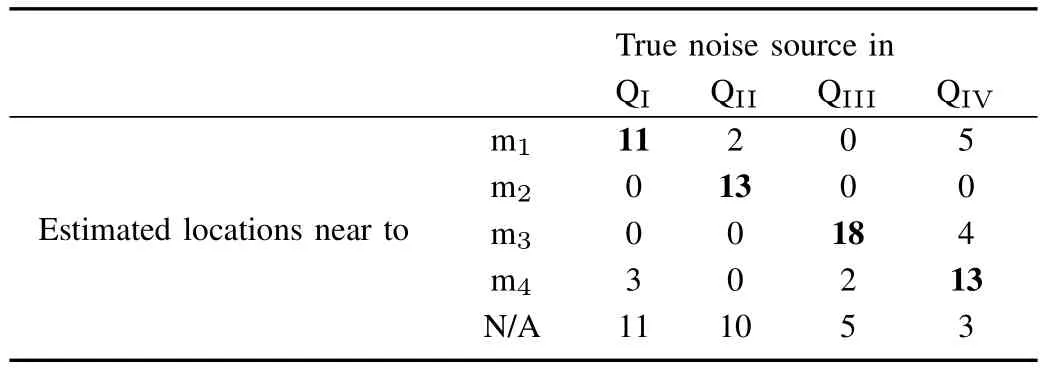
TABLE I NOISE SOURCE LOCALIZATION BY USING GCC METHOD
For the SRP algorithm,the estimated results of the same total 100 positions are shown in the 2-D plane of the microphone array in Fig.8.It is well noticed that the quantity of the wrong estimation for unknown noise sources is reduced.For example,only 5 points fall in other quadrants.

Fig.8.Estimation of 100 noise source positions by using SRP-PHAT method.
The performance of the SRP algorithm is summarized in Table II.There are 10 estimated locations inside the microphones array area,so these results are invalid and indicated as N/A.There are 5 estimated noise source locations in the wrong quadrant,thus the correct rate of noise source localization using SRP algorithm is 85%.
Based on the results obtained from SRP algorithm,we selected the microphone close to the noise source to act as reference microphone.The 1X2X2 feedforward ANC system with two error sensors and two secondary loudspeakers is used.We use the recorded NICU noise as the primary noise.

TABLE II NOISE SOURCE LOCALIZATION BY USING SRP METHOD
Table III presents the experimental results of the microphone-array-integrated ANC system’s performance when the reference microphone is chosen properly and improperly.When the wrong reference microphone is chosen,the causality of the ANC system is invalid and the performance is degraded.When the ANC system is causal,the performance is improved by around 5 dB.

TABLE IIINOISE REDUCTION LEVELS FOR DIFFERENT REFERENCE SELECTION(THE BOLD ONES ARE CAUSAL ANC SYSTEMS)
V.CONCLUSION
We proposed to develop the microphone array integrated ANC system.The performance of a feedforward ANC system is analyzed when the causality condition is violated.A microphone array with 4 microphones is used to pick up the noise signal simultaneously;the GCCT algorithm and SRP algorithm are used to estimate the noise source location and direction for selecting the proper reference sensor.The simulation and experiment results show that the proposed technique can locate the noise sources with high accuracy.The SRC search algorithm is utilized to reduce the computational complexity of the SPR algorithm.The FXLMS algorithm was conducted using the properly selected reference microphone.Our future work includes:multiple noise source detection and reference microphone signals processing for feed forward ANC systems,and conduct a case study for the moving noise source problem with real NICU.
杂志排行

IEEE/CAA Journal of Automatica Sinica的其它文章
- Iterative Learning Control With Incomplete Information:A Survey
- Fundamental Issues in Networked Control Systems
- Adaptive Neural Network-Based Control for a Class of Nonlinear Pure-Feedback Systems With Time-Varying Full State Constraints
- A Dynamic Road Incident Information Delivery Strategy to Reduce Urban Traffic Congestion
- Energy Efficient Predictive Control for Vapor Compression Refrigeration Cycle Systems
- A Robust Reserve Scheduling Method Considering Asymmetrical Wind Power Distribution