主动悬架有限频域H∞时滞控制参数影响分析及优化
2018-09-26张进秋王兴野贾进峰孙宜权李欣
张进秋, 王兴野, 贾进峰, 孙宜权, 李欣
(陆军装甲兵学院 车辆工程系, 北京 100072)
0 引言
良好的悬架系统对于提高军用越野车辆的乘坐舒适性和越野机动性具有重要意义,与传统被动悬架和半主动悬架相比,主动悬架能够根据路面情况对车体振动进行主动控制,因此能够更好地抑制不平路面传递到车体的振动,是未来车辆悬架发展方向[1-4]。由于传感器信号的采集、控制力的求解计算和作动器的机械响应等原因,时滞现象在主动控制过程中是必然存在的,而其中又以作动器机械响应导致的时滞为主。相关研究表明[5-6],时滞不仅会恶化主动控制的控制效果,而且有可能造成系统失稳,因此,在控制算法设计过程中考虑控制输入的时滞问题对于提高控制的实际效果是十分必要的。
国内外学者对于时滞的控制问题进行了广泛而深入的研究,提出了大量控制方法,如Smith预估控制、自适应控制、预测控制、滑模变结构控制、鲁棒控制、模糊控制、神经网络控制以及它们之间通过相互组合形成的各种改进控制等[7-15]。其中,鲁棒控制虽然具有较为优异的控制性能,但由于计算复杂,限制了其广泛应用。近年来,随着有关线性矩阵不等式(LMI)理论的提出,鲁棒H∞控制算法的设计与计算被大大简化,使之成为一种更为实用的控制方法。此外,H∞控制算法还是一种有效的频域控制方法[16-18],可针对人体敏感的4~8 Hz频段内振动进行控制算法的优化设计,因此成为当前研究的一个热点。文献[19]对基于状态反馈的有限频域H∞控制算法进行了设计与性能研究,文献[20-21]和文献[22]则进一步分别对基于输出反馈和时变时滞的H∞控制算法进行了理论推导与试验验证。但是在实际应用过程中发现,利用文献[19-22]中所使用的可调参数取值进行控制算法求解时,得到的解并不是最优解,有的甚至会出现没有可行解的问题。针对这个问题,本文首先利用文献[19]中的方法提出考虑控制输入时滞的有限频域H∞控制算法,然后在确定可调参数取值范围的基础上分析控制参数变化对最优解求解的影响,并利用遗传算法优化得到使控制算法有最优解的可调参数最优取值,最后通过数值计算与仿真对控制算法的性能进行频域和时域分析。
1 时滞系统模型
考虑如图1所示的2自由度1/4车辆主动悬架模型,可得到悬架模型的动力学方程为
(1)
式中:ms为车体质量;mt为车轮质量;ks和kt分别为悬架刚度和车轮刚度;cs为作动器机械阻尼系数;F为主动控制力;xr为路面不平位移;xs和xt分别为车体垂直位移和车轮垂直位移。具体参数设置见表1.

表1 悬架模型参数
悬架系统控制的目标是要在满足悬架动行程不超过最大许用行程xstmax、车轮与地面保持良好接触和振动控制力小于作动器最大控制力Fmax等条件的约束下,使悬架对外界扰动的抑制能力最好。根据以上控制目标和约束条件,可选取系统的状态变量x(t)、系统的目标输出变量z1(t)和约束输出变量z2(t)分别为
式中:t为车辆行驶时间;g为重力加速度。
考虑系统的控制时滞为τ>0,则(1)式所示悬架控制系统可转化为如下状态空间:
(2)
式中:
2 考虑时滞的有限频域H∞控制算法设计及控制参数影响分析
2.1 考虑时滞的有限频域H∞控制算法设计
以(2)式所对应的时滞系统为研究对象,系统中一个考虑控制输入时滞的有限频域H∞控制算法可按照以下方法设计。
定理对于给定的正数γ、α、β1、β2、ρ,如果存在对称矩阵P>0,P1>0,P2>0,S1>0,S2>0,R1>0,R2>0,Q>0,以及任意矩阵K和Y满足不等式(3)式~(5)式:
(3)
(4)
(5)

定理的具体证明过程可参考文献[19],从其证明过程中可知,控制算法求解时,参数ρ的取值决定了控制算法所能适应的wmax,而参数α、β1、β2的主要作用则是通过调整它们的取值使LMI有可行解。进行控制算法设计时,通常应首先确定所针对的wmax,即wmax近似为1个固定值,虽然参数α、β1、β2在不同取值条件下求得的γ2值是1个变化量,但是通过不同取值测试发现,其最小值都在同一数量级的较小范围内变化,以时滞τ=5 ms时的求解为例,γ的最小值基本在3左右变化。为了使针对的wmax值近似为1个固定值,此时参数ρ取固定值0.16,因此需要优化的可调控制参数主要就是α、β1、β2.
2.2 控制参数影响分析
要分析控制参数α、β1、β2取值变化对求解值的影响,需要考虑两个方面的问题:一是得到使控制算法有可行解的参数最大取值范围;二是分析参数在取值范围内变化时,求解的最小值变化是否有一定规律。经过不同取值后的求解计算,得到使控制算法有可行解的3个参数变化范围分别为α∈[0.1,200],β1∈[0.01,0.2],β2∈[0.8,200].
固定α、β1、β2中的1个参数,使另外2个参数在各自的取值范围内变化,分析参数变化对γ最小值的影响,参数的初始取值为α=50,β1=0.1,β2=10,求解的结果如图2所示。从图2(a)中可以看出,当β2=10固定不变时,在α=94.790,β1=0.116情况下,γ最小值为2.673;从图2(b)中可以看出,当α=50固定不变时,在β1=0.147 4,β2=11.284情况下,γ最小值为2.698;从图2(c)中可以看出,当β1=0.1固定不变时,在α=157.916,β2=11.284情况下,γ最小值为2.731. 从上述数据可以看出,当固定3个参数中的1个、变换另外2个参数时,γ最小解对应的某1个参数值并不都相同,且与该参数的取值范围差距可能较大,即并不是在某一较小范围内使γ有最小解,最终求解的γ最小值与3个参数的取值组合有很大关系。
3 基于遗传算法的控制算法优化设计
由于控制参数不同的取值组合会导致求解结果有较大变化,如果单纯依靠经验来调试和确定各个参数的取值,不仅要耗费大量时间,而且也很难找到真正的最优解。因此,考虑引入拥有较强全局优化能力和并行搜索能力的遗传算法来改进控制算法的设计,以找到一组性能最佳的控制参数,具体过程如下。
1)染色体编码与种群生成。染色体编码采用实数编码方式,以控制参数作为染色体的3个可调变量,则可将其表示为Ch=(α,β1,β2). 初始种群的创建采用可行种群,种群规模设置为N=100.
2)适应度函数与适应值缩放。适应度函数可直接取为Fitness=γ(Ch),适应值缩放采用排序方法。
3)选择、交叉与变异。选择算子采用竞争方法,每次选择时随机地从种群中选出nc个染色体(nc 交叉算子采用单点交叉方法。 变异算子采用均匀策略,使搜索点在整个搜索空间中随机自由移动,从而增加种群的多样性。 4)迁移。迁移算子支持在多个子种群中交换个体,某一子种群中的最优个体间隔一定的代数代替另一子种群中的最差个体。与单种群遗传算法相比,支持多子种群中个体迁移的遗传算法能够在大多数情况下改善算法的优化性能。迁移算子的3个控制参数分别设置如下:迁移方向选择向前迁移,即只能从n代子种群向n+1代子种群迁移;迁移率设置为0.1,如果第n代发生迁移,则迁移的个体数nm=0.1×Nn,Nn为第n代子种群的个体数量;迁移间隔设置为5,即每5代发生一次迁移。 遗传算法的终止准则采用迭代次数,本文设置终止遗传算法的迭代次数为20代。综上所述,可得到遗传算法的流程如图3所示。 根据以上确定的遗传算法流程和参数取值,运用MATLAB软件中的GA工具箱进行求解计算,求解过程中历代种群的最优适应度和平均适应度如图4所示。从图4中可以看出,初始种群的最小适应值为3,平均适应值为4.5,由此可知,遗传算法可在较大范围内进行最优值的搜索,具有较好的全局优化能力。在迭代到第16代时,种群的最大、最小和平均适应度基本稳定在2.669,表明了算法具有较快的收敛速度。最终运行得到的遗传算法优化值方法的参数取值、最优解与经验值方法的参数取值、最优解对比如表2所示。 表2 控制参数与最优解对比 为了对比分析控制器对于时滞的控制效果,参考文献[16]中的设计,求解未考虑输入时滞的有限频域H∞控制算法(以下称控制1)的状态反馈增益Kf1. 根据表1中悬架参数的取值和表2中控制参数的取值,分别对依据经验设计的考虑控制时滞的有限频域H∞控制算法(以下称控制2)和基于遗传算法优化设计的考虑控制时滞的有限频域H∞控制算法(以下称控制3)的状态反馈增益Kf2、Kf3进行设计求解。分别对3种控制条件下的振动特性进行频域和时域的仿真分析, Kf1=[14 352.1 -1 591.76 -2 091.80 -915.95], 从频域角度对不同控制条件下悬挂系统的车体加速度、悬架动行程和车轮动载荷传递率进行对比,如图5所示。 由图5(a)可以看出:与被动无控制状态相比,使用有限频域H∞控制算法的悬架振动控制效果在除车轮共振点的整个频域范围内都优于无控制状态;与控制1相比,控制2和控制3在除低频区之外的车体共振区和中高频区域,特别是对乘坐舒适性影响较大的4~8 Hz频段都有更好的控制效果;与控制2相比,控制3在除低频区和车体共振区之外的中高频区域,特别是对乘坐舒适性影响较大的4~8 Hz频段都有更好的控制效果。综合考虑车体加速度在整个频域范围内的控制效果可以得出:基于遗传算法优化设计的有限频域H∞控制算法对乘坐舒适性的改善效果最优。 由图5(b)可以看出:与被动无控制状态相比,采用有限频域H∞控制算法会导致低频区和车轮共振区悬架动行程的显著恶化,而在车体共振区则略优于无控制状态,高频区与无控制状态基本相当;3种控制算法在整个频域上相比,控制3优于控制2,控制2优于控制1,但差距都很小。综合考虑悬架动行程在整个频域范围内的振动控制效果可以得出:主动控制会造成悬架动行程的增大,且其中基于遗传算法优化设计的有限频域H∞控制算法对车轮动载荷的恶化程度稍大。 由图5(c)可以看出:与被动无控制状态相比,采用有限频域H∞控制算法可显著降低中低频区域的车轮动载荷,同时又显著增加了车轮共振区的车轮动载荷,而在高频区与被动无控制基本相同;与控制1相比,控制2在全频域内优于控制1,控制3除在车体共振区优于控制1外,其他频段均劣于控制1;与控制2相比,控制3除在车体共振区略优于控制2外,其他频段均劣于控制2. 综合考虑车轮动载荷在整个频域范围内的控制效果可以得出:基于遗传算法优化设计的有限频域H∞控制算法对车轮动载荷的恶化稍大,从而会在一定程度上恶化车辆的操纵稳定性。 控制算法设计的主要目标是改善车辆的乘坐舒适性,但悬架动行程与车轮动载荷均需小于其许用值,即满足约束条件。而不同控制算法在不同频段上的控制性能各有优劣,因此总体性能是否满足约束条件以及性能的优劣对比,还需对控制算法进行时域分析。 某型军用轮式车辆在乡村土路(C级路面)上的平均行驶速度约为36 km/h,最大行驶速度约为85 km/h. 为进一步验证控制算法对于不同等级路面的振动控制效果,下面对车辆分别以36 km/h、85 km/h速度行驶于C级路面40 s时间后悬架的减振性能进行仿真分析。根据国家标准GB/T 7031—2005,利用谐波叠加法生成相应的路面随机激励信号作为扰动输入,对4种不同控制条件下得到的数据进行处理,得到车体加权加速度均方根值的统计计算结果如表3所示,对悬架相对动行程、车轮相对动载荷、相对控制力峰值的统计计算结果如表4所示。 表3 车体加权加速度均方根值 表4 控制算法约束性能峰值统计 分析表3中的数据可以发现:与被动无控制状态相比,3种控制算法都能够有效地降低不同等级路面激励条件下的车体加权加速度均方根值,改善车辆的乘坐舒适性,且改善率均大于30%,控制算法具有较好的鲁棒性;由3种控制算法相比可以看出,考虑了控制输入时滞的控制2、控制3对车体加速度的控制效果优于没有考虑控制输入时滞的控制1,且使用遗传算法对控制参数进行优化的控制3比依靠经验设计的控制2的控制效果提升了1.83%~7.18%,比未考虑控制输入时滞的控制1的控制效果提升了11.82%~12.25%. 通过表4中约束性能的峰值统计数据可以看出:在C级路面行驶速度36 km/h条件下,控制的约束条件均能得到满足;而在C级路面行驶速度85 km/h条件下,除悬架相对动行程能够满足约束条件外,车轮相对动载荷与相对控制力均不能满足控制约束条件,通过分析计算发现,这是因为此时的激励信号超过了控制算法设计所允许的最大扰动能量。 根据L2范数的定义可知,外界扰动信号能量w的计算方法为 (6) 式中:fs0为参考空间频率,取值为0.1 m-1;Gxr(n0)为路面不平度系数,对于C级路面,取值为256×10-6m2/m-1;v为车速;fu、fl分别代表上限、下限时间频率,可按照(7)式进行计算: f=fsv, (7) fs为路面空间频率,上限空间频率fsu、下限空间频率fsl通常取值分别为2.83 m-1、0.011 m-1. 综合以上频域与时域的分析可以看出,使用遗传算法优化设计的考虑控制输入时滞的有限频域H∞控制算法,能够在外界扰动为能量有界信号的情况下,有效降低在4~8 Hz频域范围内的车体加速度,提高车辆的乘坐舒适性,同时满足悬架相对动行程、车轮相对动载荷和相对控制力的约束条件。当外界扰动能量超过设计所允许的最大值时,虽然约束条件不能得到充分保证,但对于车辆的乘坐舒适性仍有较好地改善作用。 1)考虑控制输入时滞的有限频域H∞控制算法的最优解主要由可调参数α,β1,β2的取值决定,但各参数与最优解之间没有确定关系,难以单纯依靠经验获得控制算法的最优解,因此可以采用遗传算法对控制参数取值进行优化设计。 2)对于能量有界的路面扰动输入,基于遗传算法优化设计的控制算法,能够在满足控制约束条件下更好地降低时滞对控制效果的影响,降低车体在4~8 Hz频域范围内的振动,提高车辆的乘坐舒适性。当外界扰动能量超过设计所允许的最大值时,约束条件不能得到充分保证,但控制算法对于车辆的乘坐舒适性仍有较好地改善作用。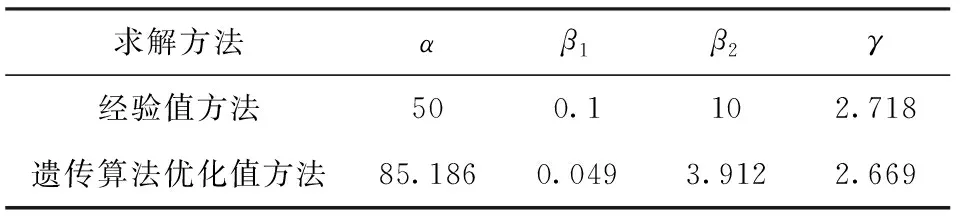
4 性能分析
Kf2=[18 178.4 67.21 4 039.22 -963.62],
Kf3=[17 481.5 76.97 9 500.99 -1 005.51].4.1 频域分析
4.2 时域分析




5 结论
