自主移动式机器人运动自动控制技术研究
2018-09-01夏洪永
夏洪永
(重庆化工职业学院机械与自动化工程学院,重庆 401228)
近年来,随着机器人研发技术的普及与进步,机器人的发展势头十分迅猛。机器人技术涉及众多学科,如传感器科学、仿生学、机械学、电子学、材料学等,并且在军事领域、地震救灾、日常生活等众多公共领域占据重要地位,发展前景非常好,日益受到众多学者的青睐[1]。机器人在危险性大、环境较恶劣的情况下和无法预测的灾难面前,代替人类进行工作,可以提高救援效率、减少伤亡。机器人的行走方式有很多种,目前较为典型的有3类:轮式机器人、履带式机器人、足式机器人[2]。无论是哪类机器人,在行动方面都有各自的缺点,如足式机器人能耗较大、灵活性及避障能力差[3-4];履带式机器人容易受到运行环境的影响,在落差较大的地面上无法前进;轮式机器人在砂石、废墟、岩石等地形中极易受困。对此,以此3类机器人为基础,添加自主移动功能,使机器人在遇到障碍时能够自主移动,在降低人工操作费用的同时还能提高机器人在不同环境下运行时的流畅性。不仅如此,还能自主判断是否继续行走,是否需要转弯等,提高了对机器人运动性能的控制能力[5]。传统机器人控制方法主要以单片机加蓝牙为主,其以Arduino mega 2560和Torobot蓝牙模块作为硬件基础,利用Arduino IDE编程语言编写六足机器人运动控制程序,通过Bluetooth.spp软件发送控制指令并返回命令状态,从而实现对机器人运动的控制[6]。但是这种方式存在控制耗时长、转弯动作受到限制的问题。为解决上述问题,本文采用基于多项插补优化的自主移动式机器人运动的自动控制技术。
1 机器人运动控制动力学分析
在机器人运动过程中,其动力学情况直接影响机器人的运行速度、精度及效率,本文通过对机器人控制系统进行线性分析,构建机器人运动控制动力学模型,实现对机器人运动控制动力学方面的分析。
1.1 机器人控制系统线性化分析
本文以自主移动式机器人作为传统机器人的优化模式,在其移动控制方面进行优化设计[7-8]。由于自主移动式机器人结构复杂,具有多个自由度,因此对其进行运动控制时需要对其动力学方程进行分析、求解,建立机器人运动控制动力学模型,从而为其运动路线和姿态的控制提供基础依据。
机器人的动力学方程为:
(1)

为了防止不确定性对机器人的运动产生干扰,通过加入适合的状态空间方程[9]得到自主移动式机器人的动力学公式。
(2)

为轮轴的反作用力。因为运行过程中机器人的向心力矢量及摩擦矢量模式复杂[10],不易计算,需将动力学公式简化为:
(3)
其中A21和A22的选择直接影响As的稳定性。
由式(2)、(3)得到自主移动式机器人运动定义控制力矩为:

(4)

(5)
对机器人控制系统进行线性归一化处理,可有效优化机器人运动性能,减少干扰误差,提高自主移动式机器人运动稳定性。
1.2 机器人运动控制动力学模型
在对机器人运动控制进行研究时,其动力学模型是运动控制的重点,而动力学模型却易受到非完整约束的影响,从而对控制参数产生影响。本文采用机器人的动力学模型,其控制过程中输入值设置为广义力而不是速度[12]。因此,机器人的运动学模型不能用于研究非完整约束的运动与力、力矩之间的关系。
对于一般的机器人动力学模型可以由如下的Euler-Lagrange方程描述:
(6)
式中:q=[q1,q2,…,qn]T,为机器人控制系统的n维广义坐标;L是Lagrange函数,为动能与势能之差;E(q)为n×m维输入变换矩阵;λ为Lagrange乘子;A(q)为约束矩阵;乘积AT(q)λ为约束力矢量。经过Euler-Lagrange方程分析,构建自主移动式机器人的动力学模型为:
(7)
对运动学模型两边微分[13],减少对机器人运动控制的干扰,得到动力学模型:
(8)

然后两边同时乘以ST(q),为降低控制耗能设置STATλ=0,消去Lagrange乘子λ,并整理,得最终机器人运动控制动力学模型为:
(9)
式中:S为(i+1)插补时刻的总控制量;M为滚动阻力;V为驱动力;E为轮部滚动阻力系数。
综上所述,通过对机器人控制系统进行线性化分析,构建机器人运动控制动力学模型,可为优化机器人运动自动控制技术提供基础依据。
2 机器人运动自动控制技术优化研究
在对原有的机器人运动控制动力学模型进行构建的基础上,以自主移动为目的,进行路线及姿态的插补分析,从而优化机器人运动自动控制技术。
设需要插补的直线路段为PsPe,起始点为Ps(xs,ys,zs),终结点为Pe(xe,ye,ze)。通过控制运行速度得到插补时刻(i+1)的总控制量S,设v为插补速度,a为加速度,进行如下直线插补计算。
位移计算公式:
(10)
速度计算公式:
(11)
加速度计算公式:
(12)
式中:Kx,Ky,Kz分别为x,y,z方向的插补系数。由于插补总时间与插补周期无法产生整数倍的关系,最后一个插补点不是终点位置的可能较大[14],为了预防下一段插补路线精度低,将使用速度控制模式的终点数据当作最后一个插补点。路线直线插补算法流程如图1所示。
本文选择和速度曲线同步的位姿插补方式。假设机器人运行路径总位移是L,经由速度曲线算法计算得到下一插补路程是L1,起点为Ps(xs,ys,zs,as,bs,cs),终点为Pe(xe,ye,ze,ae,be,ce),下一 插补点为Pi(xi,yi,zi,ai,bi,ci)。位姿参数ai,bi,ci的计算公式如下:

图1 直线插补流程图
(13)
(14)
(15)
综上所述,可得机器人姿态插补流程如图2所示。自主移动式机器人在运动进程里会一直获取地标信息并对地标信息进行测试。测试完信息后,与程序里的地理位置信息进行对比,依据对比信息对机器人位置进行判断,即是否需要进行路线上地标信息的调整,同时分辨是否需要转弯,并上传现有地理位置信息,开始判断导引模式。其中Flag标记用于判断引导线是否需要对机器人进行检测,若Flag标记位置为1,那么表示引导线已开始检测,自主移动机器人进入寻迹导引模式;反之,若Flag标记位置为0,自主移动式机器人则进入惯性器件导引模式。当确定进入惯性器件导引模式后, 继续对引导线进行判断,若未进入惯性器件导引模式,则对Flag标记位进行清零处理。
综上可知,通过路线直线插补及姿态插补,可提高机器人对于运动路线及姿态的控制精度,实现机器人的自主移动,扩大其使用范围。
3 实验结果分析
3.1 实验参数设置
实验采用机器人的物理参数见表1。
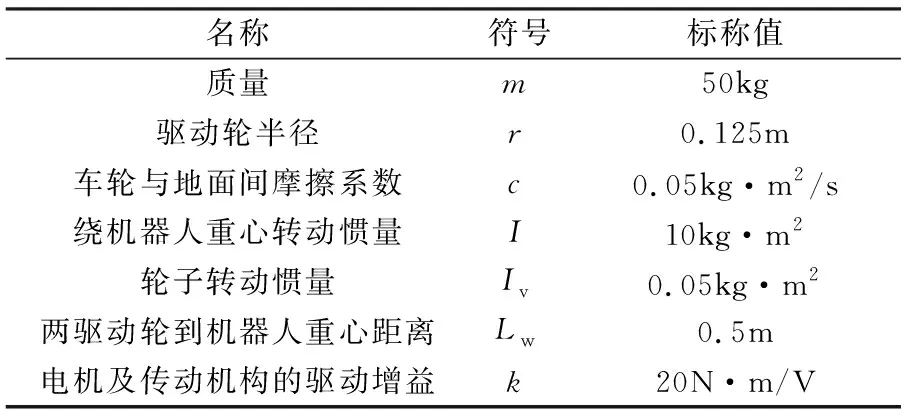
表1 机器人物理参数
3.2 实验结果分析
为了验证改进方法在自主移动式机器人运动控制方面的有效性,采用改进方法与传统控制方法对比的方式,以不同方向的运动稳定性为指标,进行实验分析,结果如图3所示。

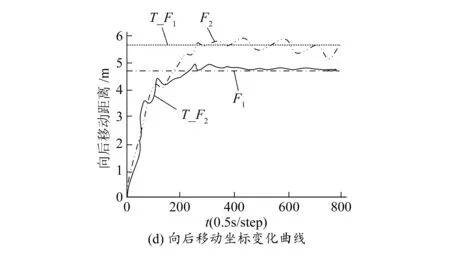
图3 机器人运动控制稳定性分析
图中,X,Y,Z,F分别代表向前、向左、向右、向后移动的实际值,而T_X、T_Y、T_Z、T_F分别代表向前、向左、向右、向后移动的目标值,下标1为传统方法结果,下标2为改进方法结果。从图3可以看出,采用传统方法控制的机器人在向前移动时,位置发生了震荡,而向左移动时位置存在稳态误差,向右移动时位置发生震荡,并且平均值偏离了目标值。使用改进控制方法可有效避免信号滞后引起的震荡,增大了对微小偏差的响应,向左移动偏差略大于向前移动偏差的原因在于向左移动控制信号较小时,惯性器件不能提供足够的推力,向右移动控制时易受到地面的影响,在向后移动方面存在一定波动,但整体上维持在目标值附近。
4 结束语
本文提出的基于双向插补分析的自主移动式机器人运动自动控制技术,在控制机器人运行路线方面精度有所提高,且稳定性较好,为机器人控制系统的设计提供了一定的技术支持。但由于本文中实验的局限性,运行环境设置不够完美,还需要在多个实验环境做进一步验证。
