基于Facet模型及组合式假人对汽车-摩托车碰撞事故的仿真
2018-08-02孔令爽金先龙侯心一
孔令爽, 秦 闯, 金先龙, 侯心一, 邱 忠
(1.上海交通大学 机械动力与工程学院,上海 200240;2.上海市公安局交通警察总队, 上海 200070)
在中国很多二三线城市,摩托车使用量逐年上升,进而摩托车交通碰撞事故也频繁发生。 据中国公安部的数据显示,2012年,中国机动车总保有量达2.33亿辆,其中,摩托车的保有量在2011年就己经达到了1亿辆[1]。随着摩托车保有量的增长,摩托车交通事故导致的死亡人数和受伤人数也在逐步增加,同时研究表明,摩托车驾驶人员每英里的道路交通事故受伤危险性是汽车驾驶员和乘客的3倍,前者死亡危险是后者的16倍[1]。因此,对摩托车与汽车碰撞事故进行系统和深入的研究,对于提高交通安全性,减少交通事故人员伤亡,具有重要的理论意义和实用价值。
目前,国内外对汽车与行人碰撞事故的研究居多,对汽车与摩托车碰撞事故的研究居少。一方面由于人车碰撞为交通事故的主要形式,另一方面由于汽车与摩托车碰撞事故的仿真不仅需要研究人与车的接触,还需要研究人与摩托车、摩托车与汽车的接触,这为仿真模型增加了很大的难度。现有的汽车-摩托车碰撞研究中,如上海交通大学的杨印群、郭磊等[2-3],湖南大学的莫富灏、聂进等[4-5],国外的Carter等[6-7],均利用多刚体模型对汽车、两轮车和假人进行建模,并在软件Madymo或Pc-Crash中进行碰撞过程再现及人体损伤分析。上述研究方法建模方便计算效率高,但是存在两个弊端。一方面采用椭球体建立多刚体车辆模型存在车辆外观及局部尺寸与真实事故中实际车辆参数有较大差别的问题,并且在车辆速度较大等情况下会发生过量穿透;另一方面,使用多刚体假人仿真对于人体局部损伤分析较为粗糙。为解决上述两方面问题,本文采用Facet模型建立汽车和摩托车的模型,在车车、车人接触部位,特别是汽车大变形部位采用弹塑性刚度曲线进行变形特性定义[8],在保证足够计算效率的同时,有效解决传统多刚体模型存在的穿透量过大的问题。利用Facet建模方法的优势还在于可以精确重现车辆的外形特征,并可以通过局部采用有限元接触算法提高接触计算的精度,而不会增大过多的计算负担。此外,本文还采用组合式假人建模技术对骑车人建立人体仿真模型,以多刚体假人模型为主体,在精细分析人体损伤的身体部位采用局部有限元模型,该模型既具有多刚体假人建模方便、计算效率高等优点,又具有有限元假人生物逼真度高、计算精确等优点[9],使得在保证计算效率的同时,提高事故仿真研究的精确性、真实性和可靠性。
本文将针对一起真实的摩托车与汽车碰撞事故,首先利用Photomodeler软件进行视频的正投影,估算出汽车与摩托车的车速;根据车辆检测报告、人体损伤报告等,利用Facet模型及组合式假人模型建立事故轿车、摩托车及骑车人的模型;根据得出的初始信息及案例卷宗,利用Madymo进行碰撞过程的仿真再现,将仿真结果与真实事故视频、车辆检测结果和受害人法医学鉴定结果相对比,验证仿真模型及方法的正确性;最后利用上述模型进行十几组仿真实验,就骑车人头部HIC值与车辆碰撞速度的关系与已有研究结果进行对比分析,进一步证明仿真模型的正确性。
1 模型的定制
1.1 Facet模型的定制
Facet模型是空材料的有限元网格,通常为三节点和四节点单元,并完全附着在参考空间、刚体、或变形体上[10]。一般情况下,Facet模型用于表示厚的或实体模型的外表面,该模型与其他模型如FE模型、多刚体模型、Facet模型的接触变形,是通过接触特性来描述的,而非像FE模型一样通过材料模型来描述,因此不会引入新的有限元计算,这使得Facet模型在保证精度的同时节约了计算时间。
Facet模型的接触特性使用接触应力与穿透量的关系描述,而非像多刚体接触一样采用力与穿透量的关系描述,使得计算接触力时考虑到接触面积的影响。 Facet表面的接触特性大体上可以通过三种方法获得。
(1)从材料模型获得接触特性[10]。以各向同性线性材料为例,定义Facet接触面的单元厚度等于各向同性线性材料有限元模型未变形厚度;将弹性模量转换为接触特性定义的工程应力-应变加载函数,把得到的函数作为加载函数;阻尼系数与各向同性线性材料相同。对于应变率无关的泡沫材料或无迟滞效应的应变率相关泡沫材料,不同之处在于需要将泡沫压缩加卸载时的工程应力与对数应变函数转换为工程应力-应变函数。
(2)从实验数据获得接触特性。用试样进行简单的材料单轴压缩实验,如图1。计算公式为:
E=(H/H0)-1,S=(-F/A0)
式中:E是工程应变;S是工程应力;F反力;H是试样压缩后高度;H0是试样的初始高度;A0是初始试样接触作用面积。当接触命令使用Contact_Force.Char且接触模型采用应力-应变方式时,应变的计算公式为E=穿透量/单元厚度,因此单元初始厚度应设定为Facet表面所描述模型的可变性层未变形时的厚度。此外,模拟开始时的接触穿透应不大于单元厚度。

图1 简单的材料单轴压缩实验Fig.1 Simple material uniaxial compression test
(3)通过查找对比国家相关标准和国内外研究成果。摩托车的接触特性曲线可参考ISO 13232《摩托车-对摩托车驾驶员碰撞保护设备的研究性评估试验和分析规程》中的数据信息[11],也可参考欧洲科学技术合作计划所开展的COST327报告中的数据[12];汽车接触特性曲线可参考奥地利林兹大学Steffan教授所开发的PC-Crash中Stiffness database数据库的数据,也可参考EuroNCAP行人保护试验[13]中的汽车曲线数据。
其中,前两种方法不会得到完全等效的模拟结果,但可以作为一种获得Facet模型接触特性的合理近似的方法;第三种方法数据更加可靠、方法更加简单。
Facet模型定制的过程实质上是各类模型相互转换的过程。首先,依据仿真所需车辆的基本参数,在3Dmax中进行车辆外形的绘制;然后将绘制的三维图以Stl格式导出并导入到Hypermesh中,在Hypermesh中进相关参数的设置和节点集的创建等,再利用Hypermesh与Lsdyna的接口导出节点文件;最后在Madymo中导入该节点文件,进而生成模型文件,将生成的模型附着在参考空间,使其可以在Madymo环境中进行与之相关的参数设置,如速度、加速度、接触设置等。
在生成Madymo模型过程中,Facet模型可以进行拆分与重组。将车辆的不同部位分别从3Dmax中导出,经过上述步骤导入到Madymo中,并附着到不同的体上,最后通过使用不同的铰链如自由铰、转动铰等实现体与体之间的连接以及不同部位之间的相对运动。该方法可以实现不同部位的独立运动,如汽车车轮的转动、摩托车龙头的转动等,使仿真过程更加接近实际情况。同时利用接触命令可以针对不同部位设置不同的接触特性,以便着重研究发生接触碰撞的部位,从而在保证准确实现车辆运动的同时又节约了计算时间。
1.2 组合假人的定制
在摩托车碰撞事故的研究中,常用TNO假人来模拟人体损伤状态下的车人碰撞事故重构,该假人模型具有可承受多维力、计算时间短等特点[14]。但是由于该数字假人通常用多刚体椭球表示,这就使得假人的接触特性不能得到精确表达,尤其需要对特定接触部位进行研究时更是如此。本文使用的组合式假人,以TNO行人假人为基础,参考欧盟 HUMOS 项目中的国际标准整体假人模型[15],通过模型拆分与重组、关节约束定义等,结合假人模型运动状态仿真和基于中国人体形特征的假人模型缩放等方法,建立了组合式模块化变参数假人模型,并通过编程语言实现了模块选择界面的可视化,称为“交通事故仿真用假人模型定制系统”。
组合式假人有限元部分利用有限元网格建立骨骼、肌肉、皮肤等人体组织的三维模型,通过不断的可靠性试验、钝器仿真和整体事故仿真,验证了人体各部位不同类型实体间可以正常接触,而且组合式假人接触特性与真实人体接触特性基本一致,证明了模型的正确性。
以腿部有限元组合假人模型为例详述多刚体和有限元在Madymo中的耦合过程. 该组合式假人大腿和小腿采用有限元模型,身体其余部分为多刚体模型,腿部有限元模型包括股骨、胫骨、腓骨、肌肉和皮肤的有限元模型,如图2所示。
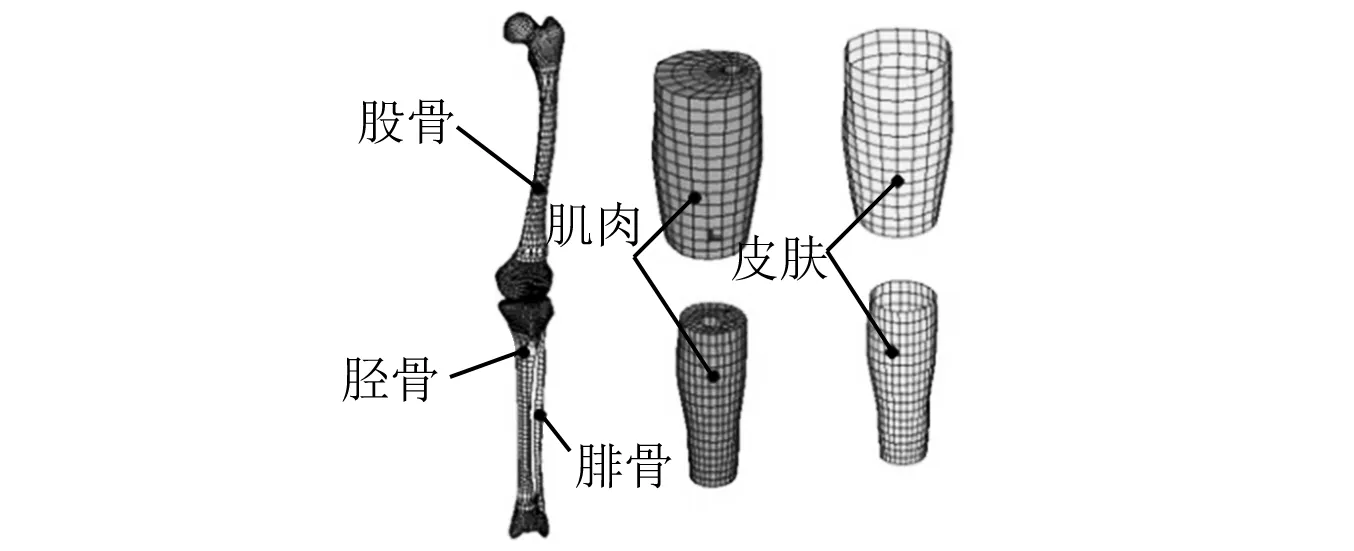
图2 腿部有限元模型Fig.2 Leg finite element model
在Madymo中定义大腿上端 Body、大腿下端Body、小腿上端Body和小腿下端Body,利用Support命令,将有限元骨骼近端和远端的部分节点分别依附于各个Body上。大小腿Body之间通过膝关节所定义的自由铰链连接,使节点力得以通过铰链传递。胫骨近端与腓骨近端、胫骨远端与腓骨远端分别采用铰链相互连接,且通过Lock命令锁死。整个下肢模型上端通过髋关节所定义的球铰链连接到盆骨上,下端通过踝关节定义的球铰链连接到脚踝上,盆骨作为假人模型多刚体主体的一部分,同时与多刚体假人身体和有限元假人下肢相连。各关节铰链外部通过刚性椭球面来反映关节处皮肤外表面的几何特征。
“交通事故仿真用假人模型定制系统”界面如图3所示。根据事故情况,选择人体严重损伤部位为有限元模型进行分析。通过“组合式假人结构定制”即可按需求在多刚体模型中选择不同部位为有限元结构生成组合式假人;通过“组合式假人参数化定制”可根据实际需求调节组合式假人的身高、体型等外形参数,达到与真实情况相吻合。
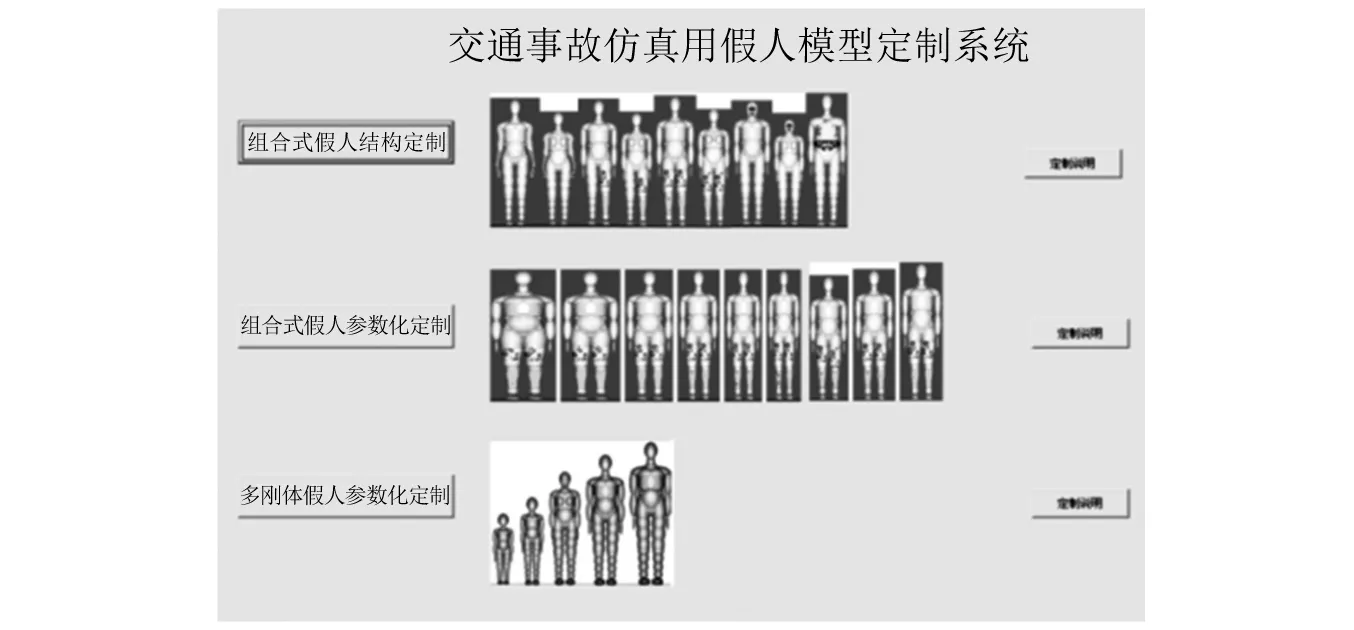
图3 交通事故仿真用假人模型定制系统界面Fig.3 System customization interface for traffic accident simulation dummies
2 汽车-摩托车碰撞案例
2.1 事故描述
黑色小轿车由南向北行驶,路过十字路口时,与由东向西直行的摩托车发生碰撞。事故发生后,小轿车继续向前直行一段距离后停下,摩托车倒地,摩托车骑车人被甩落至地面,当场死亡。事故发生的初始及结束时刻位置情况,如图4所示。

图4 交通事故发生的初始位置及结束位置Fig.4 Initial position and end position of traffic accident
根据车辆检查报告,小轿车右侧车门有明显碰撞痕迹,并且车门下部表面漆皮脱落且呈一定程度凹陷状,其中前车门凹陷较为严重;车辆右后部见少许划痕;其他部位基本完好;制动功能尚存。摩托车左侧有明显大范围碰撞痕迹,并且表面粘有黑色漆皮,左侧脚踏处及排气管处损坏,同时左侧伴有多处擦痕,判断是由于与地面摩擦产生。经检查,骑车人左小腿未骨折,左膝盖骨断裂;左股骨干骨折,腰部受损;右腿轻度擦伤;左手肘严重擦伤,右手轻度撞伤;头部由于撞击造成颅脑损伤。事故车辆的基本参数详见表1。

表1 小轿车和摩托车基本尺寸参数
2.2 事故车辆初始速度
本文利用Photomodeler对事故视频进行分析。根据斑马线的国家标准,利用Photomodeler进行图片的正投影,求得小轿车及摩托车在一段时间内的运动距离,并根据截取视频的时间间隔,计算求出小轿车及摩托车的初始速度。
(1)小轿车的初始速度
利用上海市交通警察局专用软件player打开事故视频。截取视频中的两个时刻:10 997和11 001。利用Photomodeler打开图片,根据已知参照物绘制平面坐标系,将斑马线及车辆的位置信息表达在已知坐标系中,然后进行图像的正投影,最后以斑马线的国家标准尺寸为基准进行测量,得出所需的车辆位置信息,如图5、图6所示。

图5 轿车在10 997时刻的位置Fig.5 Position of car in the moment of 10 997
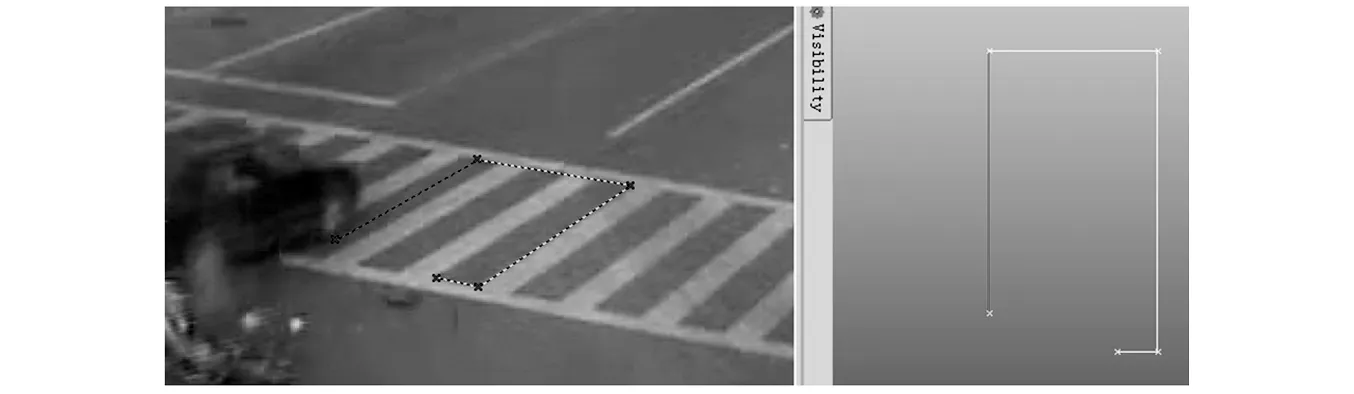
图6 轿车在11 001时刻的情况Fig.6 Position of car in the moment of 11 001
通过测量,得出轿车在两个时刻间直行的距离为1.06 m。
在此专用播放软件中,每秒被分割为24个间隔,每个间隔的时间为1/24 s,则这两个时刻的时间间隔为1/6 s。由此可以得出,小轿车在图示时刻的速度大约为6.63 m/s。从视频中可以看出,小轿车在撞击后并未立刻减速,所以图示时刻速度与碰撞时刻速度基本相同,由于图片清晰度等因素对结果产生的影响,允许在该数据基础上存在±10%的偏差。
(2)摩托车的初始速度
同轿车的测速方法,截取视频中的两个时刻:10 976和10 978,求出相应的位置信息,如图7、图8所示。

图7 摩托车在10 976时刻的情况Fig.7 Position of motor in the moment of 10 976

图8 摩托车在10 978时刻的情况Fig.8 Position of motor in the moment of 10 978
得出摩托车在两个时刻间直行的距离为1.005 m,且两个时刻的时间间隔为1/12 s。那么可以得出,摩托车的速度大约为12.06 m/s。考虑到图片清晰度等因素对结果产生的影响,允许在该数据基础上存在±10%的偏差。
2.3 事故碰撞仿真模型
根据摩托车的基本参数,结合Facet模型的建模方法,建立摩托车的Facet模型,如图9左侧所示。其中,将摩托车的车轮进行了拆分与重组,实现了龙头的正常转动;将摩托车的龙头进行了拆分与重组,实现了龙头的正常转动,并在龙头铰链处施加铰链约束,使龙头在转动的过程中,通过力矩的作用可以带动车身进行转动,使得仿真结果更加接近实际结果。
根据小轿车的基本参数,结合Facet模型的建模方法,建立小轿车的Facet模型,如图9右侧所示。其中,将车轮进行了拆分与重组,保证了车轮的正常转动;将发生碰撞一侧的车门进行了拆分与重组,在碰撞时只计算该部分的接触变形,大幅度节约了计算时间。

图9 摩托车(左)和小轿车(右)的Facet模型Fig.9 Facet model for motor(left)and car(right)
据骑车人的受伤情况,骑车人采用腿部有限元组合式假人,如图10所示。与整体多刚体模型比较,组合式模型不仅可以详细分析股骨、胫骨、腓骨所受的应力和应变,还可以通过将腿部肌肉和骨骼分别建模,反映出人体不同组织的抵抗作用。
在Madymo中对事故进行模型仿真再现。模型包括路面、斑马线、摩托车和组合式假人。仿真初始时刻,将组合式假人模型置于摩托车上,调整假人姿态与事故视频相符;摩托车位于小轿车右侧,车身与小轿车呈90度且存在小段距离,分别给小轿车与摩托车上节中所求得的速度,让它们发生碰撞。两车的轮胎与地面的摩擦因数取为0.7,骑车人与地面的摩擦因数取为0.5,骑车人与摩托车及小轿车之间的摩擦因数取为0.3。

图10 组合式假人整体模型Fig.10 Hybrid FE-MB model
在Madymo中,通过对Facet模型定义接触特性来描述其与外界环境的接触,接触特性定义在Group_FE/Contact_char的接触特性曲线中。其中,摩托车的接触特性曲线参考COST327报告中的数据,汽车接触特性曲线参考PC-Crash中Stiffness database数据库的数据;通过定义Facet表面、FE表面和多刚体表面三者之间的六种不同的接触方式,选择的不同的接触方法及接触力类型,实现路面、小轿车、摩托车及组合式假人的接触与碰撞,如表2所示;通对接触方式的选择与调节,使接触力发生变化,进而使仿真碰撞情况与实际碰撞情况相吻合,完成对整个碰撞过程的仿真。

表2 接触类型及接触面的选择
2.4 仿真结果对比与分析
通过对仿真参数进行不断的调节与分析,发现当小轿车车速为7 m/s、摩托车车速为12 m/s时,碰撞过程与实际过程基本吻合,如图11所示。从仿真结果可以看出,摩托车与小轿车右侧车门发生撞击后摔倒,在地面上滑行一段距离后停止在右数第6~7条斑马线上,仿真过程中车辆发生损伤的部位与车辆损伤报告基本相吻合,进而验证了仿真结果的正确性。
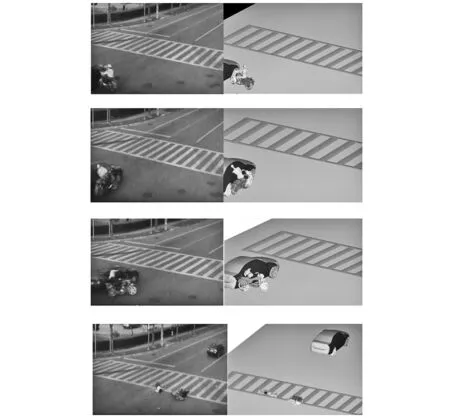
图11 仿真结果与实际结果的对比Fig.11 Comparison between simulation results and actual results
轿车右前车门在撞击过程中发生较大变形,如图12所示,与车辆检查报告中前车门凹陷相符合。

图12 轿车前车门凹陷图Fig.12 Depression of the car
从仿真结果中可以看出,摩托车骑车人在碰撞发生后,头部及身体左侧先撞击到小轿车车门,随后被甩落至地面,滑行一段距离后停止在右数第8~10条斑马线处,与视频基本一致。骑车人的仿真损伤结果与法医鉴定结果对比,如表3所示。从表中可以看出,骑车人头部HIC值[16]2次超过人体承受HIC值极限,分别发生再与小轿车车门一次碰撞、与地面二次碰撞的时候,骑车人头部加速度曲线如图13所示,此种情况下足以造成颅脑损伤,故仿真结果基本与法医鉴定结果基本相吻合。

表3 骑车人仿真损伤结果与法医鉴定结果对比

图13 骑车人头部加速度曲线Fig.13 Head acceleration curve of motor rider
骑车人左腿的vonMises 应力分布如图14所示,为了便于观察隐去摩托车及腿部部分结构。可以看出,左小腿处胫、腓骨的vonMises 应力未达到100 MPa,未达到骨折耐受极限124 MPa[17],与尸检结果小腿未发生骨折相吻合;左大腿处股骨的vonMises 应力超过密质骨的失效应力124 MPa 后仍旧继续增大,最大值达到了567 MPa,严重超过骨折发生的标准,与尸检结果大腿发生骨折相吻合,进一步说明事故仿真结果具有较高的可信度。
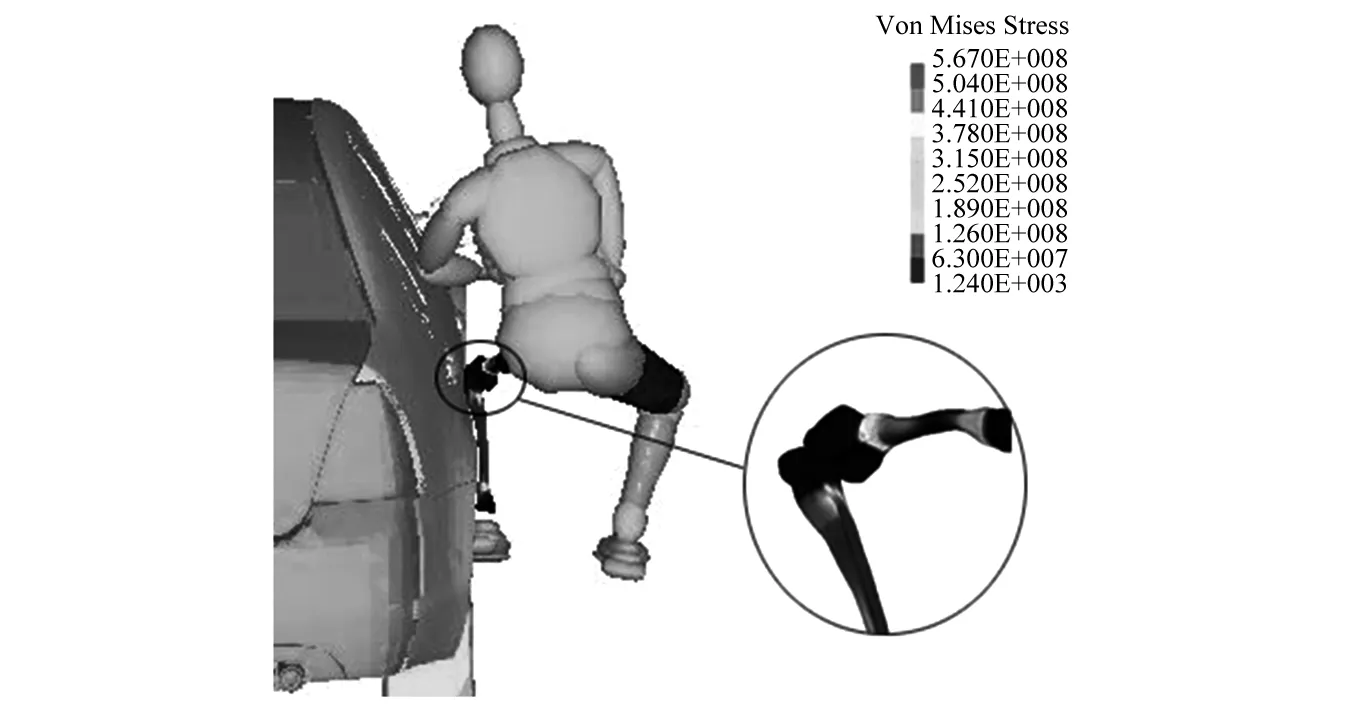
图14 下肢长骨的vonMises应力分布(Pa)Fig.14 The vonMises stress distribution of lower extremity(Pa)
为了进一步验证模型的准确性,在上述研究的基础上进行虚拟实验。令车辆碰撞速度分别为10、15…75、80 km/h,摩托车速度为20 km/h,二者进行正面碰撞。将结果进行拟合得到骑车人头部HIC值与车辆速度的关系曲线,并与Nie等[18]得出的曲线作对比,如图15所示。
从图15中可以看出,骑车人HIC值随车辆碰撞速度增加呈波动状态,但整体趋势是随着车辆碰撞速度增加而增加。当车速低于45 km/h时,大部分骑车人HIC值低于1 000。由于本文针对车型为摩托车而聂进等的研究为自行车,不同车型会对骑车人的碰撞位置及碰撞速度造成影响,因此允许本文仿真结果与聂进等研究成果出现一定误差。从仿真曲线的变化趋势上可以看出二者具有一致性。那么可以说明仿真结果的正确性,也进一步验证了仿真模型的可行性。
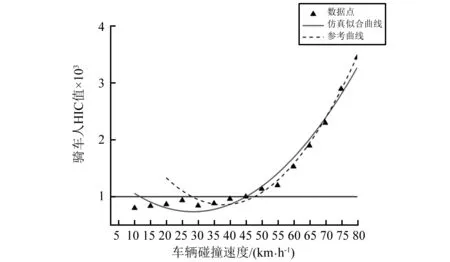
图15 骑车人HIC值与车辆碰撞速度关系图Fig.15 Relationship between vehicle impact speed and HIC
3 结 论
(1)针对传统汽车-摩托车碰撞事故仿真模型及方法的不足,采用Facet模型和组合式假人模型,应用Photomodeler和Madymo软件,结合真实事故案例,通过仿真结果与真实事故的对比分析,验证了一种新的事故仿真模型及方法的正确性和可行性。
(2)采用Facet模型建立汽车及摩托车模型,精确重现了车辆外观,有效解决多刚体模型存在的穿透量过大的问题;采用组合式假人建立骑车人模型,实现对局部损伤的精确分析。将两种模型应用于汽车-摩托车碰撞事故中,即实现了更加真实的仿真效果,又达到了碰撞仿真中计算精度与计算效率的平衡。
(3)由于仍有很多交通事故的监控录像和事故调查报告不完整,难以确定碰撞的初始速度,因此如何利用优化软件和算法,通过设置目标函数和约束条件,在计算机中不断迭代得到优化后相对准确的碰撞初始条件,将是今后研究的主要内容。
