高精度舰艇声纳测量误差标定方法
2018-07-31梁民赞费志刚
梁民赞,费志刚
(中国人民解放军91388部队, 广东 湛江 524022)
舰艇声纳主要对敌实施警戒、探测、跟踪和定位,测定目标方位、距离和径向速度信息。针对装备于舰艇的声纳经过长时间服役后,因元件老化、声基阵声零位偏移或导流罩变形等原因造成声纳指标性能下降的突出问题,提出一种基于差分GPS的舰艇声纳测向测距误差标定方法,可指导对舰艇声纳测向测距误差的精确标定,以促进其保持良好的技术状态。
在舰艇声纳测向测距误差标定方法上,传统的利用舰载雷达(或经纬仪)等定位设备作为基准值标定舰艇声纳测向测距误差的方法,由于雷达(或经纬仪)基准点与声纳声基阵位置不一致,加之雷达(或经纬仪)易受舰艇纵横摇影响,使其作为基准值定位精度不高,难以满足现代声纳高精度定位的要求。在数据处理方法上,由于传统方法标定采样间隔、样本量等无标准规范可依,标定结果往往参差不齐,提出采用标准声源对舰艇声纳进行标定,对声源布放距离、各舷角采样间隔、每角测量值等要素进行规定,标定结果一致性高,可广泛用于对舰艇声纳测向测距误差进行标定。
1 声纳测向测距原理
1.1 声纳测向基本原理
声纳测向本质上是利用声波到达水听器系统的声程差和相位差。为了测量目标方位,将参与接收的阵元形成左右两个波束,等效为两个接收点:A、B。如图1所示。波束的轴向,即y轴指向是已知的。若声波从α方向入射,则先到达A点,后到达B点,时间差τ等于BC的长度除以声波传播速度,即[1]
τ=BC/c=Dsinα/c
(1)
两个等效点源A、B的距离D和声波传播速度c是已知的,只要测出τ,即可获得声波方向α。
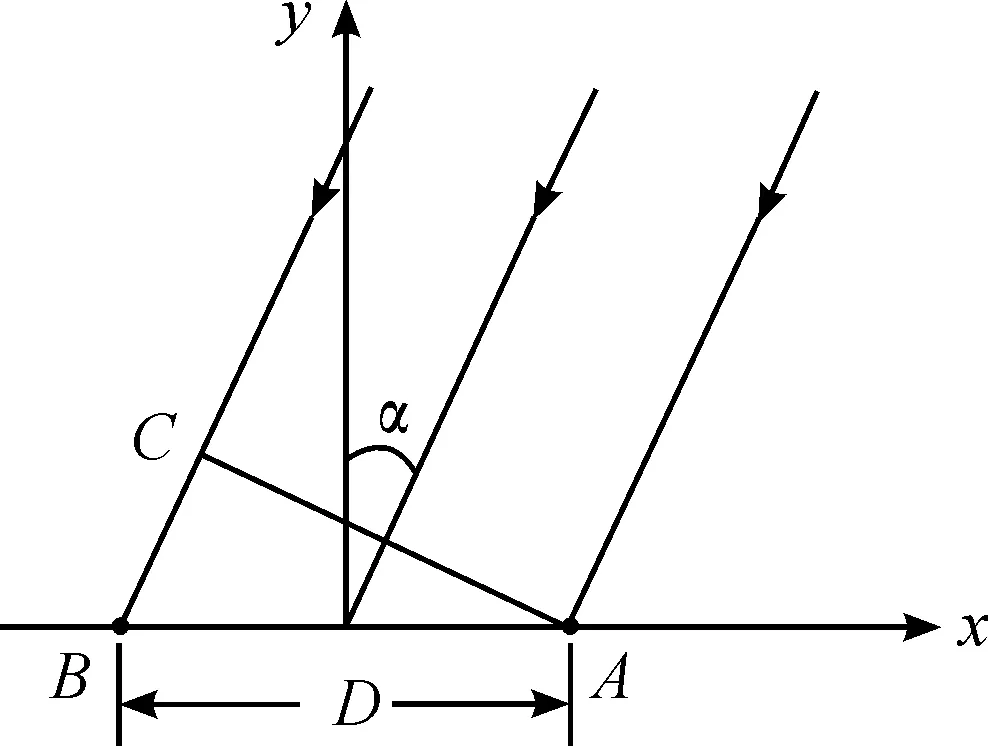
图1 方位测量原理图
若信号的频率f,则A、B两点相位的相位差Φ为:
Φ=2πfτ=2πfDsinα/c
(2)
因此,只要测出A、B两点的相位差Φ,也可获得声波的方向α。
1.2 声纳测距基本原理
声纳回声测距是利用接收回波与发射脉冲信号间的时间差测距。若目标与换能器的距离为R,换能器发射声脉冲经目标反射后往返传播时间为[1]
t=2R/c
(3)
由此,在已知声速c的情况下,可求得目标的距离为
(4)
因此,只要测得声脉冲往返时间t,便可求得目标距离。
2 数据采集方案
对舰艇声纳测量误差进行标定,需要外测数据和声纳目标信息数据支撑。录取数据主要包含GPS定位数据、声纳测量目标数据和声纳音视频数据等,这些数据主要由数据录取设备完成,而数据录取的方法、位置、精度等会影响标定结果分析与评定。本文通过数据录取系统自动化、实时记录录取上述数据,可有效消除人工记录误差。
1) 数据录取设备录取声纳目标信息数据和声纳显控台音视频信息。主要包括北京时间(时分秒)、方位(度)、距离(m)、径向速度(m/s)等目标信息。
2) 数据录取设备录取标校舰导航信息。主要包括北京时间(时分秒)、经度(度)、纬度(度)、海深(m)、航速(节)、航向(度)、纵横摇(度)等数据信息。
3) DGPS测量舰艇声纳声基阵、标准声源声中心位置信息。DGPS定位误差≤1 m,主要包括北京时间(时分秒)、经度(度)、纬度(度)、航速(m/s)、航迹向(度)等数据信息。
4) 水文测量设备测量海区声速梯度。采用CTD测量海区声速剖面,主要包括深度、声速等数据信息。
3 舰艇声纳测量误差标定方法
差分GPS(DGPS)的定位精度为1 m,定位精度理论上可满足现代声纳精度标定的需要,但实际上由于以下误差因素,① GPS天线与声基阵安装位置不一致;② 声传播滞后误差;③ 应答器时延产生“虚源”误差;④ 人工读数误差,使得仅采用GPS定位数据无法满足声纳标定精度要求。

图2 数据采集方案框图
提出了一种基于差分GPS的舰艇声纳测向测距误差标定方法,即利用高精度差分GPS对舰艇声纳和目标声源进行定位,数据录取设备自动记录声纳测量值和本舰航向数据,对差分GPS天线安装位置与声基阵声中心的固定偏差进行修正,对声传播滞后误差进行修正,对目标声源应答时延产生的“虚源”误差进行修正,可指导对水面舰舰艇声纳测向测距误差的精确标定。舰艇声纳测向测距误差标定方法如下:
测量船吊放标准声源与舰艇声纳有效中心间距为r,一般应大于5 km,吊放一定深度,顶部加装差分GPS。本舰停泊状态,加装差分GPS,安装位置应变换到声纳声中心。舰艇声纳发射声脉冲,目标声源进行应答,在整个搜索扇面内选定若干舷角分别实施标定,每角测量数据组数N不少于50。数据录取设备同时记录声纳测量值和本舰航向数据。如图3所示。

图3 声纳测量精度标定方法示意图
按GJB 6304—2008《2000中国大地测量系统》中6.7.2.3[2]规定的方法分别将舰艇声纳声基阵位置经纬度(Bw,Lw)和目标声源位置经纬度(Bm,Lm)转换到高斯平面直角坐标系上的声基阵位置(xw,yw)和目标声源位置(xm,,ym)。
3.1 声中心误差修正

(5)
(6)
其中,相对于舰首方向当声基阵声中心在差分GPS天线之前时取“+”号,反之则取“-”号。

图4 差分GPS天线位置偏差修正示意图
3.2 声传播滞后误差修正
由于声传播引起接收信号滞后,t时刻声纳所测目标信息实际为t-Δti时刻目标信息,因此,需要对声传播滞后误差进行修正,Δti由式(7)近似确定:
(7)
式中:Δti为声传播滞后修正时间;c为海水声速。
(8)

根据修正后坐标位置结算目标舷角和距离真值。按式(9)解算声纳声中心与目标声源之间回声测距的距离基准值。
(9)

3.3 应答器虚源误差修正
实际上,由于目标声源应答存在应答时延,标准声源在B点应答时,相当于声波经过传播在B′点应答,称之为“虚源”,因此距离真值需加上固定偏差Δd,如图5所示。
(10)
式中:τ为目标声源应答时延;c为海水声速。

图5 标准声源应答时延修正示意图
声纳回声测距距离真值为:
Di=di+Δd
(11)
3.4 计算舰艇声纳测向误差
声纳测向误差包含系统误差和随机误差。按式(12)计算声纳所测目标舷角与目标舷角基准值之差Δβi:
(12)

1) 声纳测向系统误差
按式(13)计算声纳测向系统误差[3]Eβ:
(13)
2) 声纳测向随机误差
按式(14)计算声纳测向随机误差[4]σ:
(14)
式中,σ为声纳测向随机误差。
3.5 计算舰艇声纳测距误差
舰艇声纳测距误差分别有系统误差、随机误差,具体计算方法如下:
1) 声纳测距系统误差
声纳测量目标距离误差
(15)

按式(16)计算声纳测距系统误差[3]ED:
(16)
2) 声纳测距随机误差
按式(17)计算声纳测距随机误差[4]Estdr:
(17)
式中,σstdr为声纳测距随机误差。
系统误差可直接反映出声零位误差和基阵安装的轴向误差,对长期服役的舰艇来说也可反映出导流罩整体形变引起的测向误差。
3.6 误差对比分析
DGPS的定位精度为1 m(95%概率圆),为了分析由DGPS定位精度带来的最大误差,认为声纳和目标声源的定位精度均为1 m,这样,假设声纳位置准确,目标声源相对声纳的位置误差便为2 m,以2 m为半径的圆即为目标声源误差分布圆。由DGPS定位精度带来的最大测向误差Δα1满足下式:
(18)
式中:R为目标声源误差分布圆半径;L为目标声源与声纳的距离。
∵ Δα很小,∴sinΔα≈Δα
取L=5 km,把R、L数值代入上式,同时把角度转化为以分为单位,则
(19)
若未作上述误差修正,则定位偏差为:
ΔR=R+L0+Δd
(20)
式中:R为DGPS定位误差,误差范围±2 m,L0为安装位置偏差,误差范围±50 m,Δd为声传播滞后误差,误差范围为±9 m。
(21)
通过式(19)和式(21)误差对比分析可知,经过误差修正后,定位真值测向误差为±1.4′,可满足声纳高精度标定需求,若未作修正误差,测向误差增大了约40′,已不能满足声纳精度标定的需要。
综上所述,采用上述误差修正方法,可有效提高目标方位和距离真值的准确度,从而对舰艇声纳测向测距误差进行有效标定。采用数据录取设备自动记录声纳测量值和本舰航向数据的方法,提高了数据记录样本量,数据记录标准化、自动化,解决了人工读数误差问题。采用标准声源进行测向测距误差标定,规定标定样本量,测向测距精度标定方法规范,误差标定结果一致性高,可广泛用于对舰艇声纳测向测距误差进行标定。
4 结论
介绍的舰艇声纳测向测距误差的高精度标定方法,其特征是:
1) 采用标准声源作为目标声源进行舰艇声纳测向测距误差标定,在码头系泊状态即可实施,操作方便,易于实施。
2) 提出基于差分GPS的定位误差修正方法,对差分GPS天线与声纳声中心的位置偏差进行修正,对声传播滞后时延进行修正,对标准声源应答时延进行修正,可有效提高测向测距基准值计算精度,解决了采用雷达或经纬仪作为定位基准值带来的安装位置偏差和时间同步难于实施的问题。
3) 提出数据录取设备自动记录声纳测量数据和本舰航向数据的方法,解决了人工读数带来的误差问题,提高了舰艇声纳标定效率。
4) 规定标定样本量,测向测距精度标定方法规范,误差标定结果一致性高,可大范围对舰艇声纳测向测距误差进行标定。
本方法可应用于舰艇声纳测向测距误差标定,亦可应用于声纳测向测距精度试验数据处理。
