一 种 偏 振 成 像 实 验 系 统 的 设 计
2018-07-27韩宏伟张晓晖
韩宏伟, 张晓晖, 管 风
(海军工程大学 兵器工程系, 武汉 430033)
0 引 言
偏振是光波的重要特征,不同目标具有因自身属性不同而不同的偏振特性。由于相比于传统成像,偏振成像能获得额外的偏振多维信息,因而偏振成像技术对于未来战争中应对日益复杂战场环境下目标探测与识别具有重大的意义[1-3]。目前偏振成像技术已应用于光学遥感[4]、大气透雾[5-6]、伪装目标探测[7]和水下目标探测[8]等领域。海军工程大学军用光电工程专业的某光电探测类课程在课程改革中新增了偏振成像探测的内容,要求建设与此相关的实验。因此需要搭建偏振成像实验系统。传统方法中,人工调节偏振片的角度,存在过程繁琐、干扰大、精度难以保证的问题[9]。如果购买货架偏振相机,则价格昂贵。经过综合考虑之后,课程教学团队利用滤光轮和偏振片设计实现了一种分时型的偏振成像实验系统,可以获得场景的线偏振度图像和偏振角图像,从而满足教学实验的要求。本文给出了该偏振成像实验系统的结构设计、偏振片偏振方向标定方法、视场非一致性校正方法以及实验结果。实验结果表明,所设计的偏振成像系统能够反映场景中不同目标的偏振特性,且具有结构简单、操作简便的优点,可以满足教学实验的要求。
1 偏振成像基本原理
一般用斯托克斯矢量S=[IQUV]T来表征光的偏振特性。其中:I表示光强;Q和U表示线偏振分量;V表示圆偏振分量[10]。光学元件对光波偏振态的改变可用4×4大小的穆勒矩阵M描述,即入射光的斯托克斯参量Sin与透射光的斯托克斯参量Sout之间的关系为:
(1)
如果仅能获取场景的强度和线偏振信息(即Sin的前3个分量),则称为线偏振成像[11],此时可计算出场景的线偏振度DOLP和偏振角AOP[12]:
(2)
根据获取偏振态图像的方式大致可以将偏振成像方法分为同时和分时两种类型[10]。本文所设计的偏振成像系统属于后者。
2 系统结构设计
所设计的分时型偏振成像实验系统的结构如图1所示,由滤光轮、相机和计算机三大部件组成。其中相机和滤光轮通过其底部的定位孔安装在光学平台上,以保证光轴的稳定性。滤光轮选用Thorlabs公司的FW102C型马达驱动滤光轮,可以安装6个∅1″滤光片。本文利用其1、3、5位安装偏振片,2、4、6位暂时不用。偏振片的消光比大于1 000∶1。计算机与FW102C之间通过USB2.0接口通信,可控制滤光轮旋转到指定位置并回报。相机选用PointGrey公司的FL3-GE-14S3M超紧凑型GIGE数字相机。计算机通过网络接口向相机传输控制指令并接收采集图像数据。系统工作时:①计算机通过网口设置相机曝光时间、帧率等参数;②由计算机通过USB接口向滤光轮发送位置指令;③待滤光轮旋转到位后,计算机采集图像;④重复②、③步,采集3个偏振片位置下的图像;⑤对图像进行预处理后计算出入射光束的斯托克斯矢量,进而获得场景或目标的线偏振度图像和偏振角图像。

图1 偏振成像实验系统的结构图
除上述部件外,在实验室内进行偏振成像实验时还需要主动光源进行照明(图1中未画出)。选用了非偏振和偏振两型光源,其中非偏振光源为白光LED加柔光器组成的面阵光源,偏振光源由尺寸较小的LED光源加可旋转偏振片组成。
3 系统误差校正
3.1 偏振片偏振方向标定
3个偏振片通过手动方式安装在滤光轮的1、3、5位,理想偏振方向分别为0°、-45°和-90°(这里取逆着光轴观察,垂直向上为基准方向,顺时针旋转角度为正,逆时针旋转角度为负)。然而,实际安装后的偏振片偏振方向与理想方向之间存在偏差,因此需要对偏振方向进行标定。
根据马吕斯定律,强度为I0的偏振光经过检偏器后,其光强I满足:
I=I0·cos2θ
(3)
式中:θ为入射偏振光的光矢量振动方向与检偏器偏振方向之间的夹角[13]。根据这一原理,偏振片实际偏振方向标定方法为:将偏振光源放置在偏振成像实验系统前方视场中心位置,通过调节镜头使LED灯珠图像清晰。打开光源,在每个滤光轮位置下,旋转光源的偏振片1周,并每隔10°采集一幅图像。对于每幅图像,取图像中心灯珠区域计算灰度值,所得结果如图2所示。
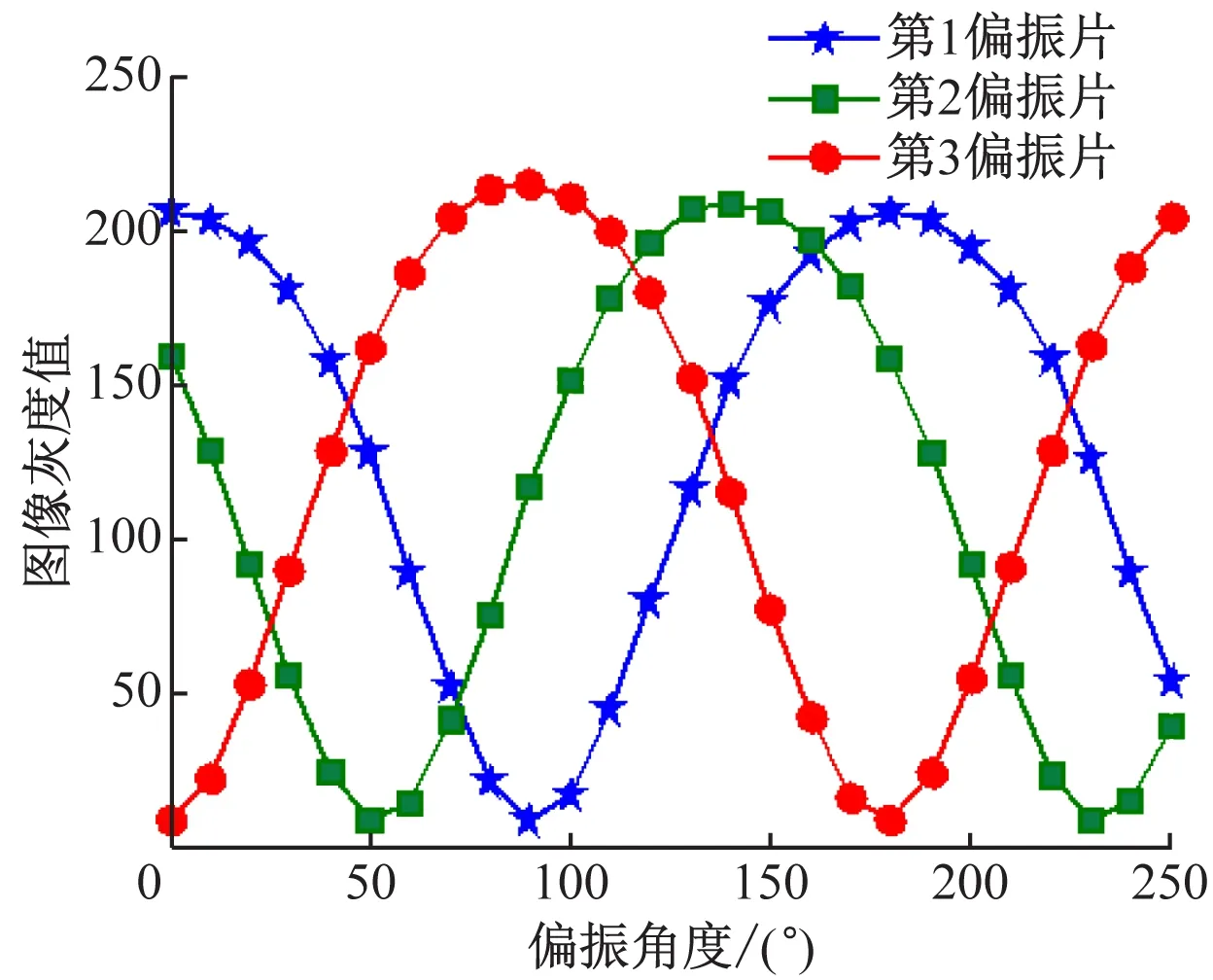
图2 偏振片偏振方向测量曲线
对于每条曲线,按下式进行拟合:
y=a·cos2(θ′+φ)
(4)
式中:θ′为起偏器旋转角度;y为所计算出的灰度值。拟合出的φ值即为滤光轮中偏振片的实际偏振角度。经计算,3个偏振角度分别为φ1=1.812 4°、φ2=-37.357 1°和φ3=-92.124 0°。
完成角度标定之后,建立3个偏振片位置下所采集的灰度图像与场景的线偏振度图像和偏振角图像之间的计算关系。由于偏振片的穆勒矩阵为[14]:
Mp(φ)=
(5)
将式(5)代入式(1),可得透过偏振片的出射光强与入射光束斯托克斯参量之间的关系为:
(6)
i=1,2,3
假设相机响应是线性的,则解式(6)所确定的方程组可得到3个偏振片位置下所采集的灰度图像与入射光斯托克斯矢量之间的关系为:
(7)
再根据式(2)即可得到所观察场景的线偏振度和偏振角。
3.2 视场非一致性校正
由于偏振片平行度指标的影响,再加上将其安装进滤光轮时的误差,3个偏振片位置下相机的视场并不重合。因此需要对视场非一致性校正后才能利用式(7)和式(2)进行下一步的计算。
文献[15]中基于图像配准的思想,通过计算待配准图像与模板图像的空域互相关最大值来得到基点坐标,进而完成配准,现场对不同偏振方向下的图像进行视场非一致性校正。但是该方法只在不同偏振方向下图像只存在平移变换的情况下才有效,实际上各个图像之间还存在旋转变换,即待配准图像与基准图像之间为仿射变换。针对这一情况,考虑到FW102C具有较高的定位精度,本文以I(φ1)为基准图像,利用标定板事先求出I(φ2)和I(φ3)与I(φ1)之间的变换矩阵,然后实验时对I(φ2)和I(φ3)进行前向变换来完成视场非一致性校正。具体步骤如下(借助Matlab软件):①将标定板放置在偏振成像实验系统前方,通过相机采集3个偏振片位置下的图像;②利用cpselect函数选择12个配准点,如图3所示;③通过fitgeotrans函数求取变换矩阵;④通过imtransform函数对待配准图像进行前向仿射变换。




图3 配准点的选取
4 实验与结果
图4为所设计的偏振成像实验系统在主动光源照射下对目标的成像结果。其中,目标为涂黑的铝片,放置在纸板前面。主动光源和偏振成像系统采用收发同置的配置方式。通过旋转目标可以改变照明光束的入射角度。图4(a)和图4(b)为非偏振光源照明下,不同入射角所获得的线偏振度,表明随着入射角度的增大,目标反射光发生起偏。图4(c)和图4(b)为偏振光源照明下,不同入射角所获得的线偏振度,说明随着入射角度的增大,目标反射光的退偏效应增大。

(a) 非偏振光小角度入射(b) 非偏振光大角度入射(c) 线偏振光小角度入射(d) 线偏振光大角度入射
图4 不同光源不同入射角的线偏振度图像
图5为不同配准方法对视场非一致性校正的比较,所成像的场景为纸板前放置的一些金属零件,照明光源为线偏振光。其中图5(a)为利用文献[9]中所述方法进行校正后得到的DOLP图像,图5(b)为利用本文方法进行校正后得到的DOLP图像。


图5 不同配准方法对视场非一致性校正的比较
由图5可见,图5(a)中目标存在虚假边缘(例如左面零件的上边缘),而图5(b)中则没有这种情况。
5 结 语
利用Thorlabs FW102C滤光轮和偏振片设计实现了一种分时型偏振成像实验系统以满足课程新增内容教学实验的需求。以马吕斯定律为基础,通过拟合方法完成了偏振片偏振角度标定;利用标定板,通过图像配准方法完成了视场非一致性校正。实验证明成像结果能够反映目标的偏振差异,可以满足实验教学的需要。接下来将完善教学实验内容,如典型军事目标材料的反射偏振特性、偏振成像对烟幕、伪装下目标的探测识别能力等。