基于线性反馈控制的分数阶混沌系统的Q-S同步研究
2018-07-13路杰
路 杰
(宿州职业技术学院 基础教学部,安徽 宿州 234101)
随着分数阶微分方程自身相关理论的发展,研究表明用分数阶系统描述各种工程物理中现象更能反映这些真实系统所呈现的物理过程,随着研究的深入,学者们采用数值模拟等方式发现了分数阶非线性系统也存在混沌现象,如分数阶Chua电路系统[1],分数阶Chen系统[2],分数阶Liu系统[3],分数阶Liu系统[4],分数阶超混沌Rossler系统[5], 分数阶超混沌Chen系统[6]等,由于分数阶系统描述的混沌系统因其阶数因素带来的复杂性,与整数阶混沌系统相比,在保密通信等领域具有更大的潜在应用前景和价值.因而, 近几年来,分数阶混沌系统的同步与控制受到越来越多学者们的密切关注,已经成为一个研究热点。相同步[7]、反向同步[8]、投影同步[9]以及脉冲同步[10]等各种同步类型相继提出,以及实现这些同步而产生非线性控制[11],滑模控制[8-9],积极控制[12],自适应控制[13]等控制策略,但这些控制策略[14]一方面控制成本过高,一方面在工程中不容易实现.相比之下,线性反馈控制具有外在形式简单,控制成本[15]低,易于实现等方面的优势而倍受青睐.利用线控制实现整数阶混沌系统的同步[16-17].但利用线性反馈控制来研究分数阶混沌系统同步的文献相对较少[18-19]。
到目前为止,有关混沌系统同步研究报道,无论是整数阶混沌系统还是分数阶混沌系统都集中在系统状态同步,而事实上,由于外界的各种扰动和不确定因素的影响,一般很难检测到所有的状态变量,尤其是在大型和复杂系统中,于是,Yang提出了Q-S同步的概念[20].这种类型的同步不需要状态的同步,只要求主动系统和驱动系统的观测函数同步.近年来,学者们对整数阶混沌系统的Q-S同步进行研究并取得了一系列的结果[21-23].由于分数阶系统与整数阶微分系统之间存在着本质差别,处理整阶微分系统同步控制的有关结论和方法不能直接平移到分数阶微分系统,因而,有关分数阶混沌同步控制的研究成果远没有整数阶情况的丰富,有待深入研究.到目前为止,有关分数阶混沌系统的Q-S同步的结果较少。
综上所述,本文以分数阶Liu系统为例,利用线性反馈控制的方法实现了在给定状态观测函数下分数阶Liu混沌系统的Q-S同步。
1 分数阶系统Q-S同步概念
分数阶导数实质上是任意阶的微积分,数学家们从不同的角度入手,给出了不同的定义,常用的分数阶导数有Grumwald-Letnikov(GL)定义,Riemann-Liouville(RL),Caputo(C)定义.后两者的定义是对前两者的改进,其中Riemann-Liouville定义适合理论分析,由于Caputo定义中初始值有明确的物理意义,在工程中的应用较多。

下面给出分数阶混沌系统Q-S的概念:
考虑下面两个具有分数阶α的连续动力系统:
(3)
(4)
其中,x,y∈Rn为系统的状态变量,F,G:Rn→Rn为连续向量函数,令连续光滑量函数Q(x(t))=(Q1(x(t)),Q2(x(t)),…,Qn(x(t)))T和S(y(t))=(S1(y(t)),S2(y(t)),…,Sn(y(t)))T
分别为系统驱动(3)和响应系统(4)的可观测变量函数,U(x,y,t)为控制输入。
定义1若存在控制器U(x,y,t)使得以任何初值(x(0),y(0)出发的系统(3)和(4)的所有轨道(x,y)都趋向M={(x(t),y(t))Qi(x(t))=Si(y(t)),i=1,2,…n}
即,{(x(t),y(t))Qi(x(t))=Si(y(t)),i=1,2,…n},
(5)
则称系统驱动(3)与响应驱动系统(4)关于观测函数(Q,S),Q-S同步。
2 分数阶Liu系统的Q-S同步
分数阶Liu系统的数学模型为[4]:
其中,x1,x2,x3是状态变量a,b,c,d,h是参数,当a=10,b=40,c=2.5,d=10,h=4,分数阶(α1,α2,α3)=(0.9,0.92,0.95)时, 图1展示混沌行为:

图1 分数阶(α1,α2,α3)=(0.9,0.92,0.95)时, 分数阶Liu系统的混沌吸引子
假设系统(6)为驱动系统, 响应系统为
其中,u1,u2,u3为控制输入.
在本文中假定驱动系统(3)和响应系统的(4)的观测变量函数分别为:
和
设计线性反馈控制项为
并结合式(6),(7),(8)和(9),可以得到下面误差方程:
其中,e1=x1+x2-y1-y2,e2=x2+x3-y2-y3,e3=x1+x3-y1-y3。
式(11)可以写出矩阵形式
(12)
其中A=
目的就是要找到合适的反馈增益k1,k2,k3使得误差系统(12)的系数矩阵的特征值在稳定区域。令λ为矩阵A的任一特征值,则ε=(ε1,ε2,ε3)T为其相应的特征向量,可得:
Aε=λε.
(13)
在上式两边同时共轭转置H,
(14)
将式(13)左乘εH,式(14)右乘ε,再把所得结果相加有:
(15)
即
(16)
这里
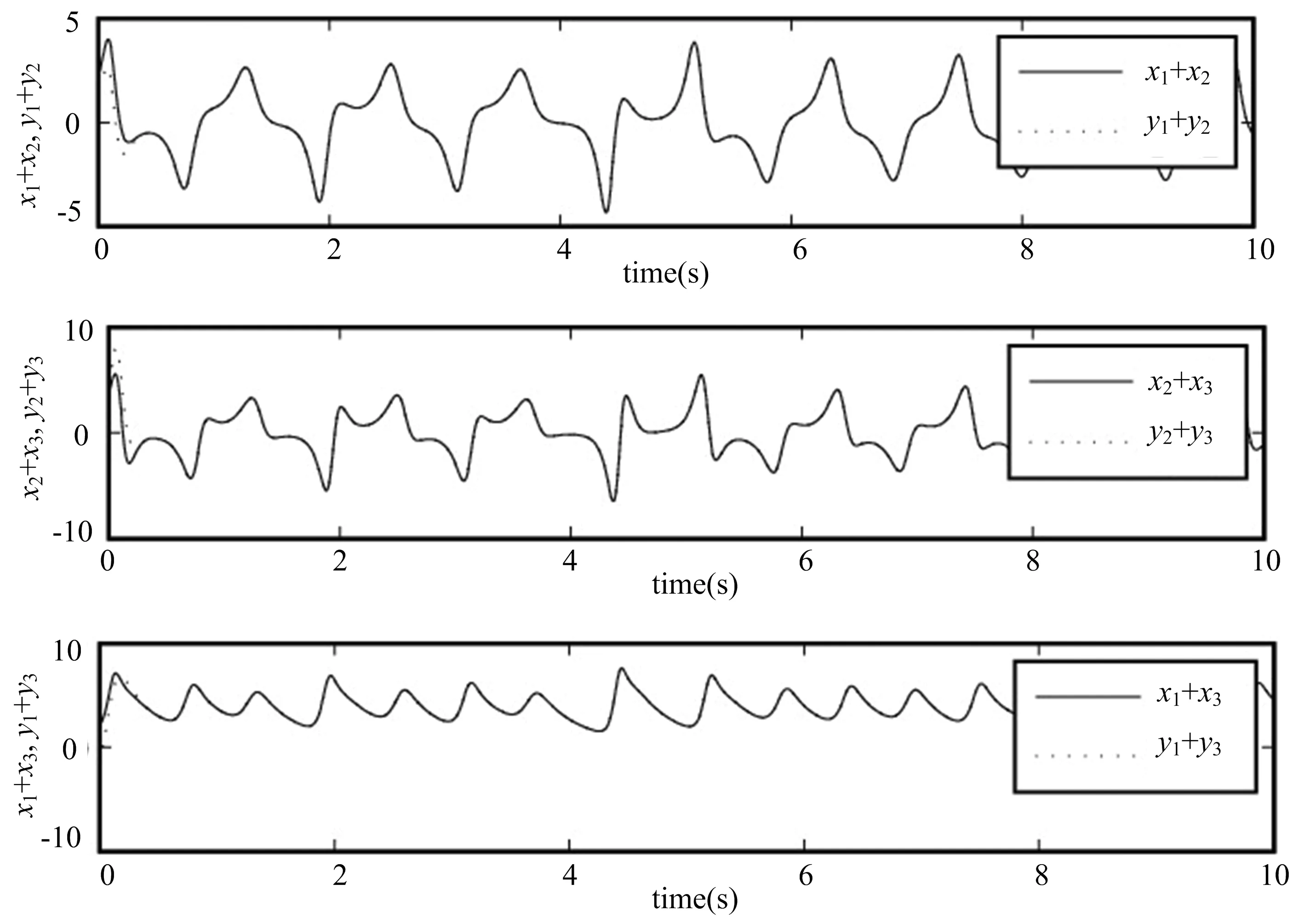
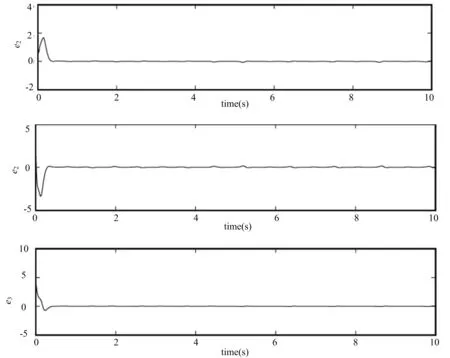
由于混沌系统的有界性,则存在一个正常数L使得|x| (17) 从式(17)可知,若矩阵P2为负定,则误差系统(12)的系数矩阵的特征值λ满足 即误差系统(12)是渐渐稳定的。 若反馈增益k1,k2,k3满足下列不等式,则矩阵P2为负定 综合以上分析,可以得到以下定理: 定理若反馈增益k1,k2,k3满足式(18),驱动系统(6)将关于观测函数(8)和(9)Q-S同步于响应系统(7)。 从上述分析过程中可知,我们对状态方程中的每个状态加了三个线性反馈控制项到达Q-S同步.事实上,对状态方程里的两个状态实施线性反馈控制或单个状态实施线性反馈控制均可实现驱动系统(6)Q-S同步于响应系统(7),为此,我们给出了以下推论: 情形一:两个线性反馈控制器 推论1若反馈增益k1,k2,k3满足下列条件之一,驱动系统(6)将Q-S同步于响应系统(7)。 情形二:单一的线性反馈控制器 推论2若反馈增益k1,k2,k3满足下列条件之一,驱动系统(6)将Q-S同步于响应系统(7)。 为验证上述分析结果,采取文献提出的分数阶混沌系统仿真算法进行数值仿真[24].仿真中,系统参数选取a=10,b=40,c=2.5,d=10,h=4,分数阶α1=0.9,α2=0.92,α3=0.95.驱动系统(6)和响应系统(7)的初值分别选x1(0)=2,x2(0)=3,x3(0)=2和y1(0)=-3,y2(0)=-2,y3(0)=-4,根据定理,选取反馈增益k1=250,k2=25,k3=15.结果展示为图2、图3: 图2 驱动系统(6)和响动系统(7)状态同步响应 图3 驱动系统(6)和响动系统(7)误差响应 针对分数阶混沌系统的Q-S同步问题,通过线性控制的方法实现了在给定状态观测函数下的分数阶Liu系统的Q-S同步,所使用的控制策略成本低,易于实现。同时,也避免了部分现有文献中使用线性化的方式处理带来的误差。本文所使用的方法和思路可以拓展到其他系统。
3 数值仿真
4 结论与讨论
