基于STM32单片机的电机驱动设计
2018-06-13宋玉宏周定艺詹金远黄创业
宋玉宏,周定艺,詹金远,黄创业
(顺德职业技术学院 电子与信息工程学院,广东 佛山 528333)
直流电机具有运转平稳、噪音低等优点,广泛用于电动类产品中。电机的起停、转向及转速等控制策略是电机驱动的关键问题。
传统的电机驱动控制采用模拟方式,模拟控制电路复杂,精确性不高,功能扩展性受限,使得基于单片机的数字控制成为一种趋势。本文研究以H桥电机驱动电路为工作电路,单片机把电机的起停、转向和转速指令发给逻辑控制电路,产生合理的信号作为H桥的四个控制端信号,防止H桥共态导通,保证电机的正常驱动。
驱动模块的控制电路主要由单片机、逻辑电路、放大电路、H桥驱动电路、光电编码测速以及电机六大部分构成,其总体设计方框图如图 1所示[1]。单片机发出的主要控制信号有电机转向控制信号dir、电机转速控制信号pwm、电机制动信号ret。这三路信号对电机动作的控制存在特定的逻辑关系,故由逻辑电路实现逻辑运算得到电机驱动的控制信号。控制信号经过放大后接到H 桥电路的四个控制端,从而实现对电机的启停、正反转及速度的控制。利用光电编码电路采集电机的实时转速信号,反馈到单片机进行判断后调整电机转速控制信号pwm,实现闭环控制。

图1 方案整体结构图
本设计中的难点和重点是逻辑运算处理,H桥的选择与光电编码器的信号处理。
1 H桥电路设计
1.1 H桥电路的选取
在直流电机驱动中,可以采用电力晶体管(GTR) 集电极输出型或射极输出型驱动电路实现。但是这种驱动电路不能实现直流电机的四象限运行,电流不能反向,无制动能力,不能反向驱动。为实现电机的正、反转控制,使用 H 型桥式电路。
H桥电路是一个典型的直流电机控制电路,因为它的电路形状酷似字母H,故得名与“H桥”。4个三极管或场效应管组成H的4条垂直腿,而电机就是H中的横杠。H桥电路在电机驱动电路中逐渐成为必不可少的一部分。这种驱动电路能方便地实现电机的四象限运行,即正转、正转制动、反转、反转制动。H 桥功率驱动原理图如图 2 所示,组成 H桥驱动电路的4 只开关管工作在开关状态,G1、G4为一组,G2、G3为一组,这两组状态为互补。
因本设计的电机驱动电路的功率较大,采用功率开关器件场效应管(MOSFET)组成H桥电路。MOSFET 是电压控制型晶体管器件,具有输入阻抗大、开关速度快、无二次击穿现象等特点。
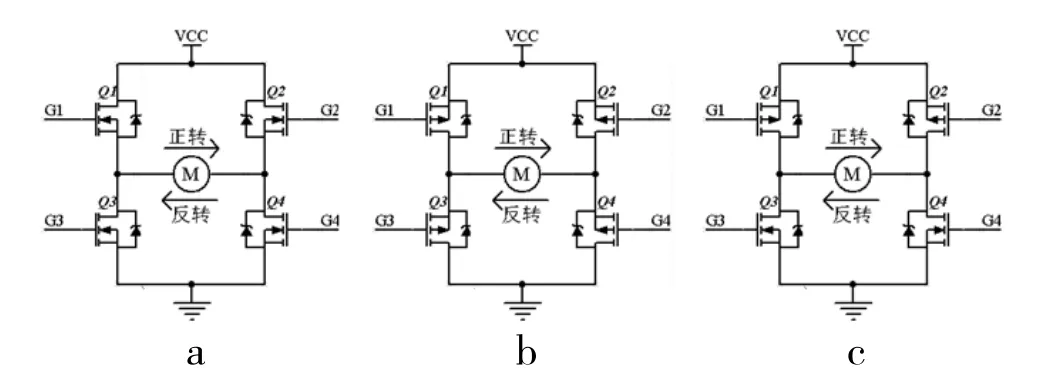
图2 H 桥驱动电路的3种方式
H 桥的开关管组合主要有 3 种方式[2]。如图2所示,图 2a中 H 桥的 4 个桥臂都使用 N 沟道增强型MOSFET 管;图 2b中 H 桥的 4 个桥臂都使用 P 沟道增强型 MOSFET 管;图 2c中上下桥臂分别使用 P 沟道增强型 MOSFET 管和 N沟道增强 MOSFET 管。
PMOS 管和 NMOS 管制造工艺不同,控制方法也不同。PMOS 管导通要求为栅极电压小于源极电压;NMOS管导通要求为栅极电压大于源极电压。
N沟道MOS管品种多,开关速度快,成本较低等特点,表面上看H 桥 4 个桥臂易于使用 N 沟道MOS 管即图 2a类电路。 假如电机正转,即Q1和 Q4导通,栅极G4电压应该高于源极S4电压,G1电压应该高于源极S电压。由于此时 Q1 的源极电压近似等供电电压VCC,因此就要求 G1电压 必须大于(VCC+Vgs),除非作一个升压电路,否则是比较难实现的,因此2a类电路这种连接方式反而比较少见,故H桥电路不采用此种设计。
图2b类电路中若要使电机正转,G4 电压就必须低于0 V- Vgs,所以可不用采取升压电路等措施从而降低电路复杂程度,但 P 沟道 MOSFET 管的品种少,价格较高,导通电阻和开关速度等都不如 N 沟道 MOSFET 管,考虑到成本,性能等方面,所以本文不采用该电路进行设计。
图2c类电路结合了上述两种电路各自的优点,使用方便。本文采用此方案设计H桥,即利用两个N 沟道增强型MOSFET管和两个P沟道增强型MOSFET管驱动电机的方案,控制电路简单、成本相对较低。
1.2 电路设计
该设计中H桥上臂MOSFET为 P沟道增强型MOS管。下臂 MOSFET为N沟道增强型MOS管。专用集成芯片FDS8958B内部集成了NMOS管与PMOS管,故采用两块芯片,可以组成所要求的H桥,且组成的电路简单,集成度高,抗干扰能力强。电路如图3所示。
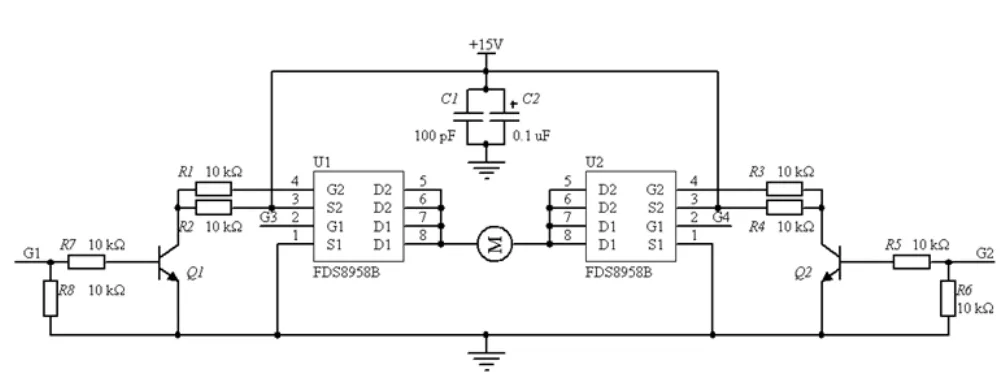
图3 电机驱动电路图
当电源瞬间断开或者电机瞬间反转时,由于电机属于感性负载,电机会阻碍电流的变化,表现为电机的两端产生反向电动势。由于大部分的MOSFET管内部集成了续流二极管,因此可以将该电流旁路到电源回路,但是这样会造成主板电压的瞬变或噪声,故在在电源输入端并联一个100 pF的高耐压低ESR的电容C1(瓷质电容或钽电容)到地,同时再并联一个0.1 uF的电解电容C2,通过如上电容吸收电机反向电动势的能量,避免对系统电源的冲击。
2 电机驱动逻辑电路设计
在逻辑运算电路中采用了四门或非运算集成芯片74hc02d[3]。相对于单门或非芯片来说。集成度高,降低了电路上的复杂程度,抗干扰能力强,在成本上也得到了控制。
电机驱动逻辑电路如图 4 所示,单片机送来的控制信号 dir、pwm、ret作为输入信号经过一系列或非运算得到输出控制信号提供给H桥的四个栅极G1,G2,G3和G4,从而实现电机的正反转和制动。
三个输入信号、四个输出信号的逻辑关系与电机工作状态如图5所示。
dir与ret通过或非运算后的结果为H桥驱动电路中G4的控制信号;
dir与ret的运算结果再与ret进行或非运算后的结果为G3的控制信号,其运算结果再与pwm进行或非运算得到的结果为G1的控制信号;
dir与ret的运算结果与pwm进行或非运算后的结果为G2的控制信号。
再通过软件编程处理,即当制动开关ret信号为高电平(即高电平有效)时,脉冲调速信号pwm端口输出高电平经过或非运算与隔离间接控制G1、G2,即上桥臂截止,从而达到正反转的制动即刹车作用。
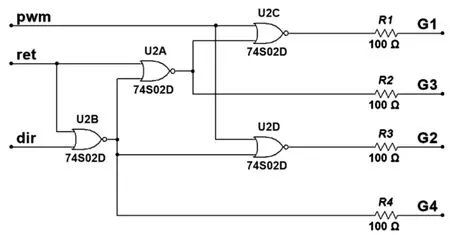
图4 电机驱动逻辑电路图

图5 信号关系及电机工作状态
逻辑电路的信号电平切换较快,可以满足不同频率的要求。在该逻辑电路中也可以达到从硬件上排除换向出现 H桥电路上下臂瞬间同时导通现象,即对MOSFET管起到了硬件上的保护作用,从而提高了MOSFET管的使用寿命与其性能保障。
3 转速采集反馈电路
光码盘具有分辨率高、输出精度优良以及寿命长等特点,因此这里采用光码盘测速,其示意图如图6所示。
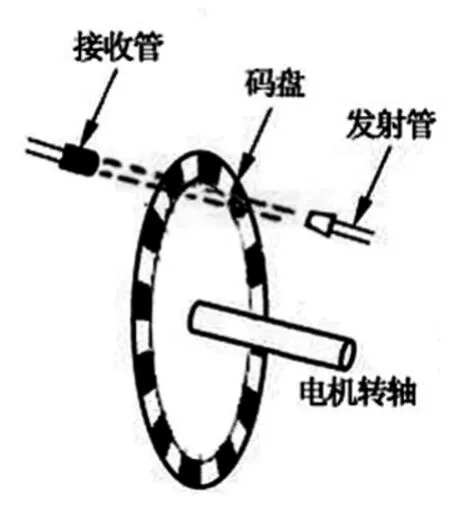
图6 光码盘示意图
红外对管分别置于码盘的两侧,码盘随着电机转运时,码盘上的透光孔可以透过发射管的红外光,接收管接收到红外光从而导通,电动转动一圈,码盘透光孔的个数决定了透过红外线的次数,即接收管导通的次数。典型的光码盘有 TLP507A、T LP800等[4]。
红外对管接收红外信号的次数受码盘运动的控制,光线透过时,接收管导通;光线被遮挡时,接收管截止。接收管导通、关断的两种状态输出形成脉冲波形信号送到单片机,单片机计算单位时间内的脉冲数。因单位时间脉冲数与转数成正比,可以得到转速的实际值,进而判断是否达到转速期望值。判断后再调整在逻辑电路中转速控制信号pwm的占空比,依此开成闭环反馈,使转速达到稳定,软件设计流程图如图7所示。
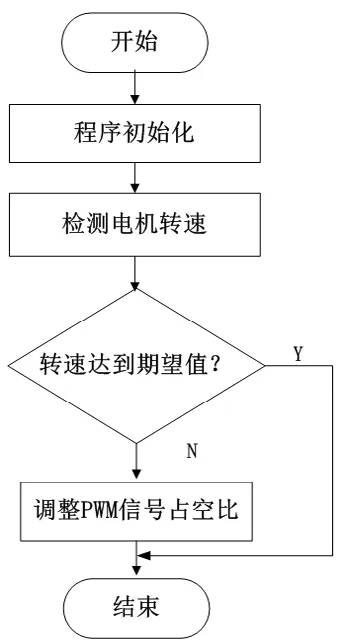
图7 调速软件设计流程图
4 结论
本文采用单片机作为电机驱动的控制器,以FDS8958B 为驱动芯片实现了对直流电机启停、转向的控制[5]。设计了实用的 H桥电机驱动电路,以及电机驱动逻辑电路,不仅实现了对直流电机的方向及速度控制,也有效防止了H桥同侧的共态导通。设计中集成芯片的使用,简化了整个系统的结构,使得硬件调试方便,工作可靠性高,更为重要的是减少了数字控制的工作量,从而减少成本。
本文把设计方案运用到智能扫地机器人,采用以ARM Cortex-M3为内核的STM32单片机编程。通过实际测试,扫地机器人实现了快速清扫、避障转向或制动等智能功能,并且电路工作稳定可靠,满足实际工程应用要求。
[1] 胡发焕,杨杰,邱小童.大功率直流电机驱动电路的设计[J].机械与电子,2009(10):77-80.
[2] 曾国强,葛良全.机器人比赛中直流电机驱动电路的设计[J].微计算机信息,2008,24(14):236-238.
[3] 阎石.数字电子技术基础[M].5 版.北京:高等教育出版社,2006.
[4] 宋玉锋,束慧.直流电动机测速装置的设计:基于2017年全国大学生电子设计竞赛项目[J].南通职业大学学报,2017,31(3):67-71.
[5] 李雪艳.智能扫地车系统设计与研究[J].机电信息,2015(33):179-182.