UPS逆变器谐波抑制环的分析与设计
2018-06-01王小军施科研董德智徐德鸿
王小军,施科研,董德智,徐德鸿
(浙江大学电气工程学院,杭州 310027)
不间断电源 UPS(uninterruptible power supply)要求为负荷提供高质量的电能[1]。《YD/T 1095通信用不间断电源(UPS)》中规定,满足I类技术要求的在线式UPS在非线性负载下的输出波形失真度不得超过4%,输出电流峰值系数不得小于3[2]。对通常采用电压电流双闭环控制的UPS逆变器,在非线性负载峰值系数较大时输出电压畸变较为严重,难以达到标准要求。
前人对此展开了深入的研究,提出了基于同步旋转坐标系的比例积分PI(proportion integral)控制器[1,3-4]和基于静止坐标系的比例谐振PR(proportion resonance)控制器[5-7],可对周期信号无静差跟踪的重复控制器[8-9]等先进控制策略以抑制谐波。其中,基于同步旋转坐标系PI控制器的谐波抑制方法通过构造一个与指定次谐波同步旋转的dq0坐标系,将谐波电压转换为直流量,然后采用PI控制器进行调节[3]。等效地,该方法在控制环路中植入指定次谐波正弦信号的动力学模型,依据内模原理可实现对指定次谐波分量的无静差抑制。
本文在dq0同步旋转坐标系下对UPS逆变器的谐波抑制环的动态模型进行了理论推导,得到了谐波抑制环被控系统的传递函数,并讨论了环路的改进和控制器参数的设计。最后,通过实验验证了谐波抑制环设计的有效性。
1 三相四线制UPS逆变器的控制环路
1.1 基本控制环路
采用abc独立控制的三相四线制逆变器可视为3个独立单相逆变器的组合。采用脉宽调制PWM(pulse width modulation)的电压型单相逆变器其简化的主电路结构和控制对象框图如图1所示。逆变桥用PWM电压源代替,其作用由开关周期平均下的电压vc决定;输出接LC二阶滤波器,负载的扰动用电流源io表示。
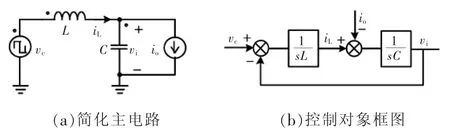
图1 三相四线制UPS中的单相逆变器Fig.1 Single-phase inverter in three-phase four-wire UPS
目前在UPS逆变器的控制设计中,普遍采用的多闭环控制环路结构[3,10-11]如图2所示,有3级共3个控制环路,逆变器的最外环为电压有效值环,中间环为电压瞬时值环,最内环为电流环。各环路均采用PI或P控制器,且外层环的输出量依次构成了内层环的指令值。为了消除逆变电压对电流环的耦合,加入了逆变电压前馈,其前馈量vi叠加在PWM调制电压vc上。
为简化问题讨论,去掉调节速度较慢的电压有效值环,同时不考虑负载电流的作用,得到了图2(b)所示的简化环路控制框图。
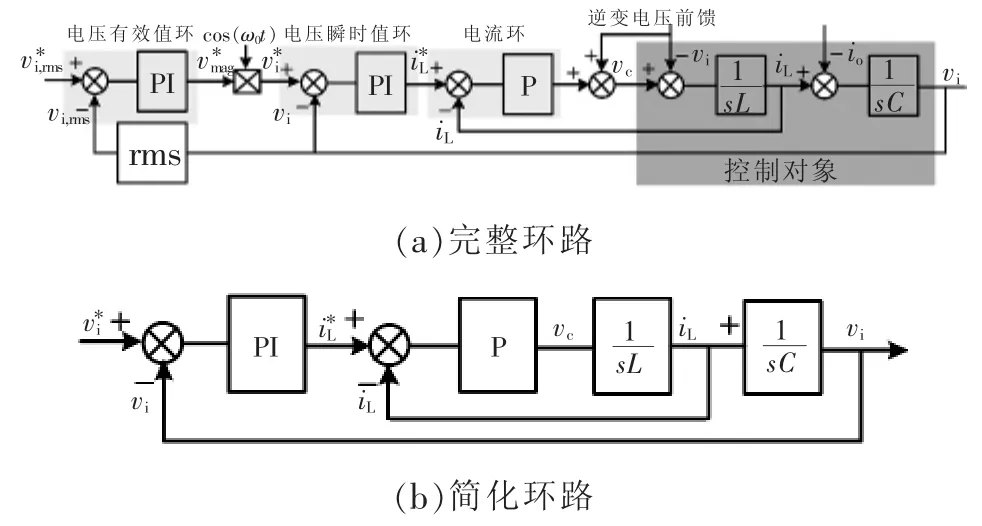
图2 逆变器的基本控制环路Fig.2 Basic control loop in inverter
1.2 谐波抑制环的引入
在非线性负载电流峰值系数较大时,逆变器的输出电压会发生畸变,出现3、5、7次等低次谐波,使得电压总谐波失真度THD(total harmonic distortion)难以达到标准要求,因此在图2的基础上了引入了基于同步旋转坐标系的谐波抑制环,其结构框图[3]如图3(a)所示。
图3(a)中,n为需要抑制的谐波次数。首先由单相逆变电压vi(t)通过延时构造出虚拟的abc三相电压。以 vi(t)为 a 相,为 b 相(T0为基波周期),为c相,由此,谐波在三相电压中依次滞后120°相位。随后通过abc/dq0n坐标变换,得到以角频率nω0旋转的坐标系下的d轴分量和q轴分量。和的直流量反映了逆变电压vi的n次谐波分量的大小。通过低通滤波器LPF(lower pass filter)提取出和中的直流分量和,再以PI控制器使和控制为0,即可消除逆变电压vi中的n次谐波分量。2个PI控制器的输出和经过abc/dq0n变换后得到在abc坐标系下的三相电流控制量和,其中仅用于谐波抑制环的控制输出。
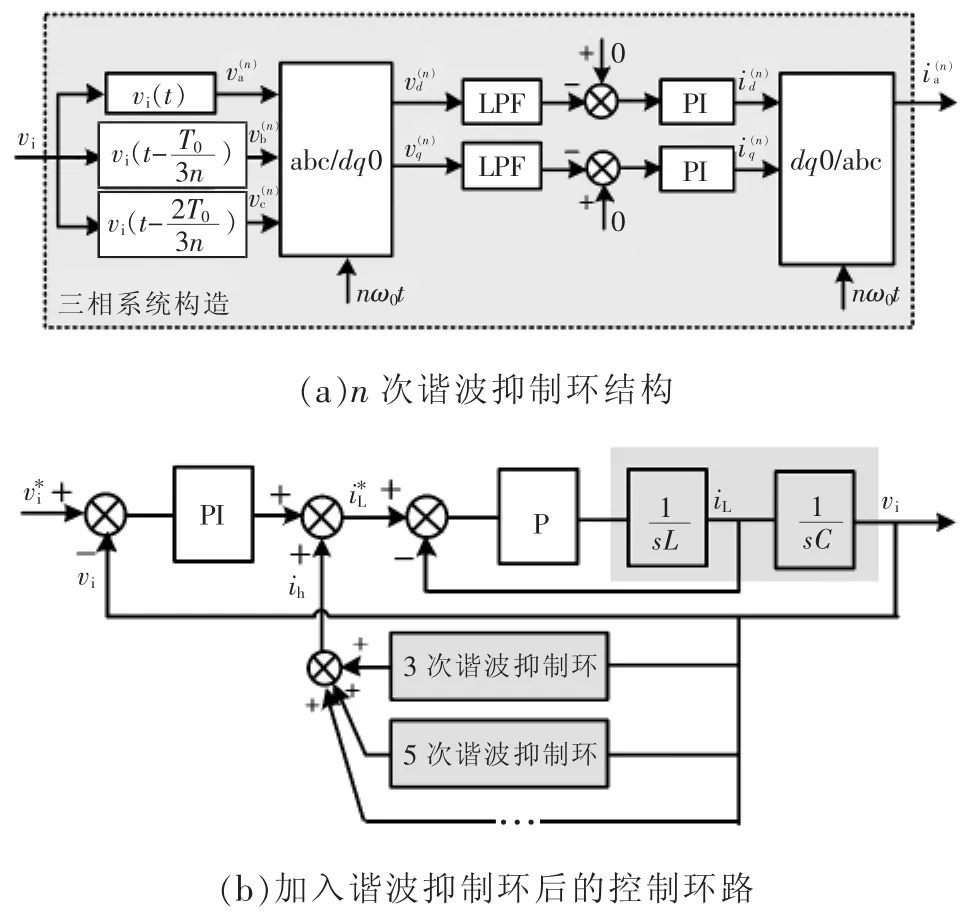
图3 逆变器的谐波抑制环Fig.3 Harmonic suppression loop in inverter
用此方法构造3、5、7等低次谐波抑制环,各次谐波抑制环的输出量叠加为ih,并作用在电流环的指令上,得到了如图3(b)所示的控制框图。
2 谐波抑制环分析
2.1 dq0坐标系下的动态模型推导
去掉独立于电路状态量的电压指令,并将电流环闭环,图3(b)可简化为图4(a)所示的框图。电流环闭环后的传递函数为,其中TL为电感L与电流环的P控制器比例系数kpL的比值。若仅考虑单个n次谐波抑制环,控制框图可进一步表示为图4(b)所示的形式。图中电压瞬时值环被视为谐波抑制环的内环。
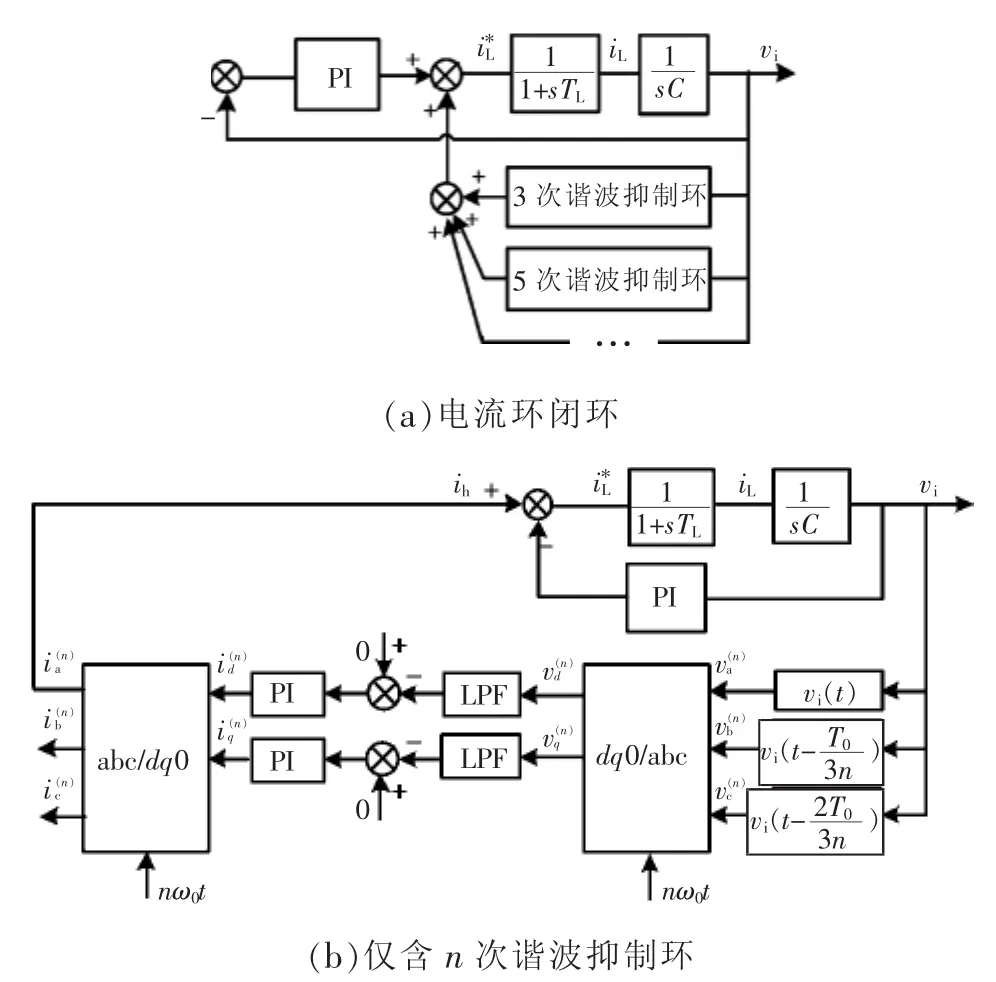
图4 谐波抑制环的简化控制框图Fig.4 Simplified control block diagram of harmonic suppression loop
由于谐波抑制环通过对进行调节,因此其被控对象的动态模型反映为ih对vi的作用方程。由图4(b)可以写出ih到vi的传递函数为

式中:kp为电压瞬时值环PI控制器的比例系数;ki为积分系数。
式(1)对应的三相系统中a相微分方程为

考虑到系统的时不变性质,用替换 t,代入式(2)得到虚构的b相微分方程,即
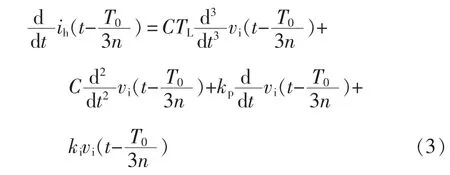
用替换t,代入式(2)得到虚构的c相微分方程为

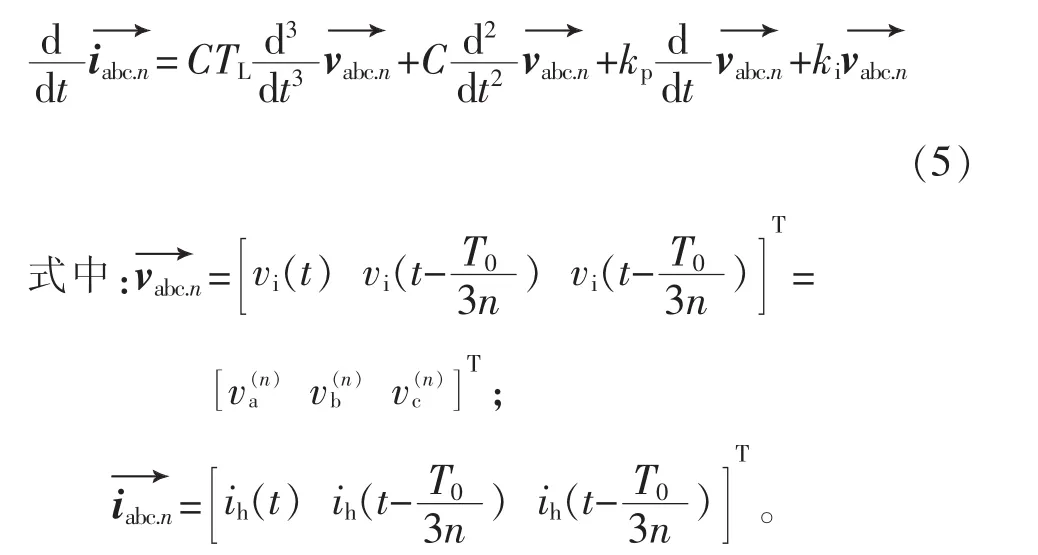
合并式(2)~式(4),写成向量的形式,得
定义abc坐标系到dq0坐标系的旋转变换矩阵为

式中:ω0为基波角频率;dq0 坐标系的旋转角频率为 nω0。因代入式(5)得

化简得

将式(7)变换到s域中,可解出
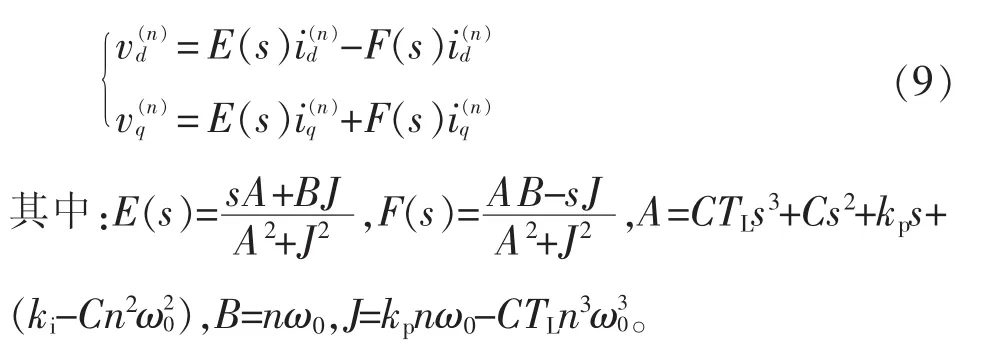
根据式(9),谐波抑制环在dq0坐标系下的动态模型如图5所示。
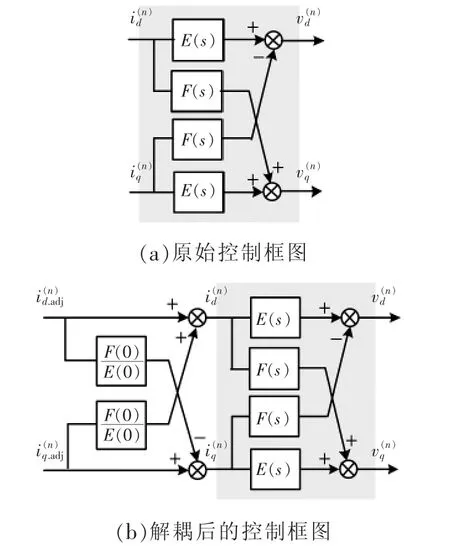
图5 谐波抑制环在dq0坐标系下的动态模型Fig.5 Dynamic model of harmonic suppression loop in dq0 coordinate system
2.2 控制环路的改进
UPS逆变器主电路和基本控制环路参数如表1所示。图6为在表1参数下,3、5、7次谐波抑制环动态模型中E(s)和F(s)的频率响应特性。可以看到,当频率较小时,E(s)和 F(s)都近似为常数,且随着谐波次数的提高,dq轴间的耦合会增强。
为减弱图5(a)中dq轴间的耦合,引入解耦控制,如图5(b)所示。解耦后电流对同轴电压的传递函数变为,电流对不同轴电压的传递函数则变为。以 5次谐波抑制环为例,解耦前后传递函数的幅频特性如图7所示。由图可知,加入解耦控制后基本实现了dq轴在低频段的解耦,d轴 和q轴控制器可以独立设计。
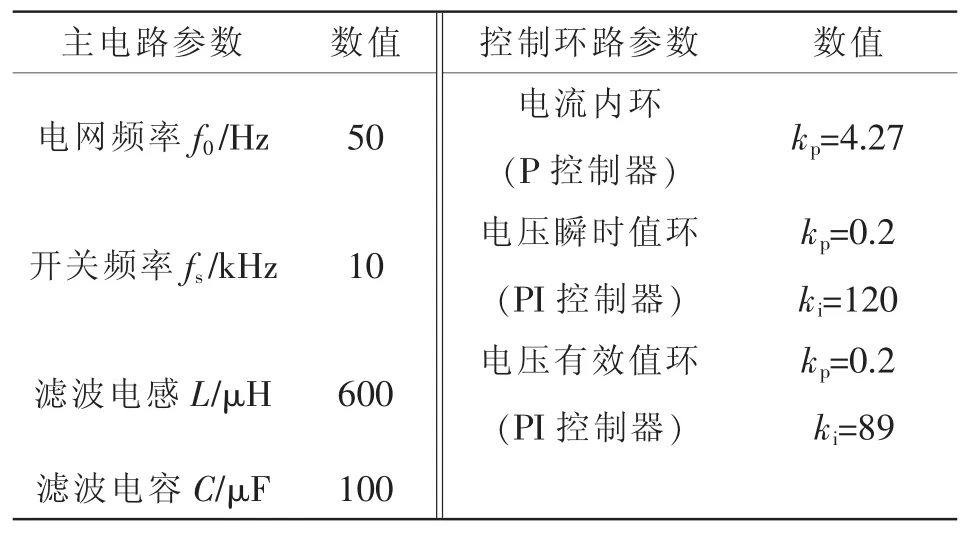
表1 UPS逆变器主电路和基本控制环路参数Tab.1 Parameters of the main circuit and basic control loops for UPS inverter
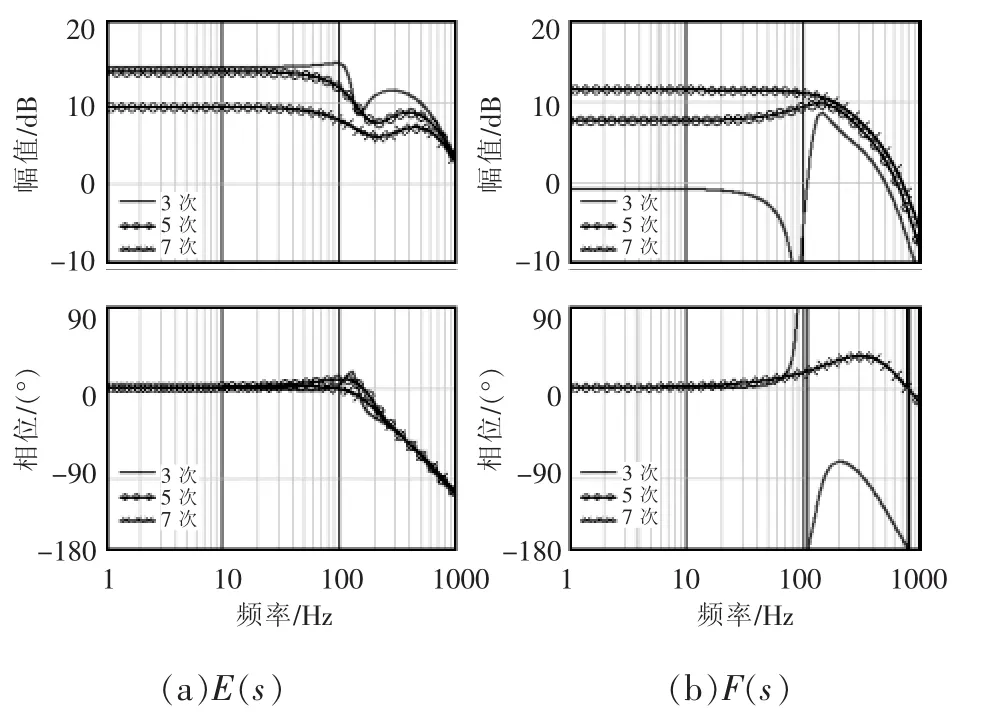
图6 谐波抑制环传递函数的波特图Fig.6 Bode plot of harmonic suppression loop’s transfer function
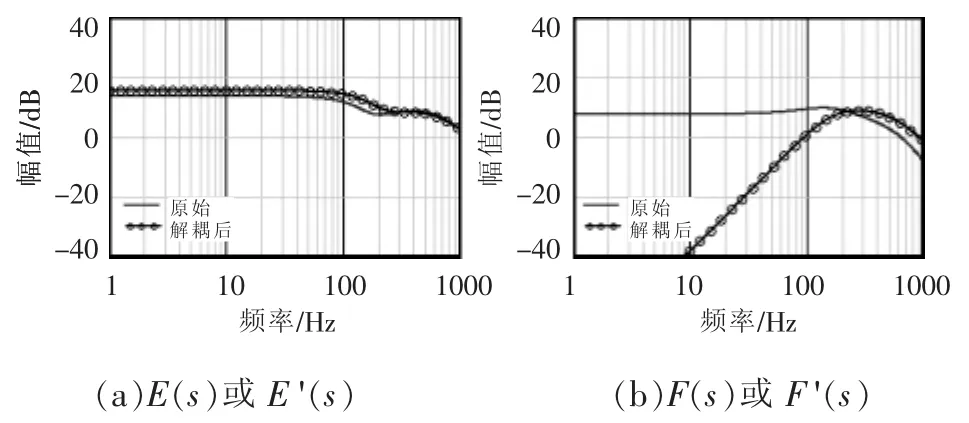
图7 解耦前后5次谐波抑制环传递函数的幅频特性Fig.7 Amplitude-frequency characteristics of the 5th harmonic suppression loop’s transfer function before and after decoupling
3 谐波抑制环的控制参数设计
改进后谐波抑制环在dq0坐标系下的完整控制框图如图8所示。参照文献[12]采用经典的频率响应法设计控制器参数。逆变器主电路和基本控制环路的参数见表1所示。设计LPF为二阶低通滤波器,其传递函数为

式中:ζ为阻尼系数;fn为滤波器的转折频率。
为使第2.1节中成立,且不同次谐波抑制环的控制不相互干扰,需限制谐波抑制环的控制带宽。本文取各次谐波抑制环的系统穿越频率为10 Hz,相位裕度为100°,设计二阶低通滤波器的阻尼系数,转折频率fn=20 Hz,由此计算的PI控制器参数如表2所示。以5次谐波抑制环为例,设计得到的系统开环传递函数的频率响应特性如图9所示。
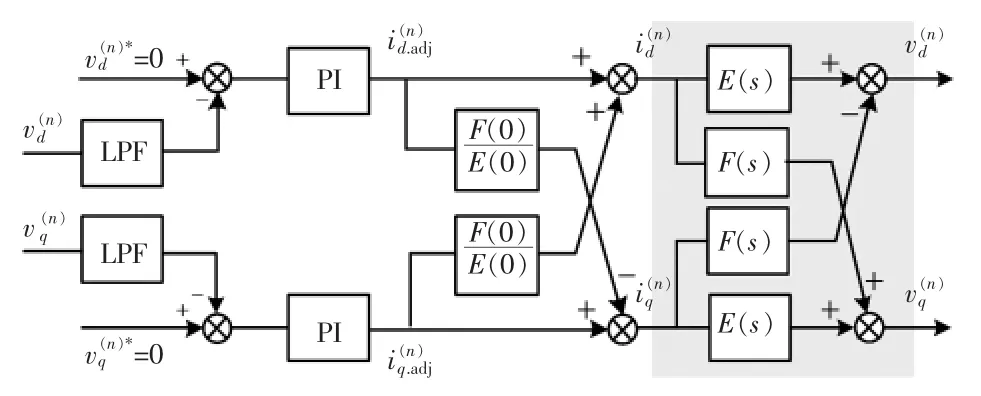
图8 谐波抑制环在dq0坐标系下的控制框图Fig.8 Control block diagram of harmonic suppression loop in dq0 coordinate system
表2 UPS逆变器谐波抑制环路参数Tab.2 Parameters of harmonic suppression loop in UPS inverter
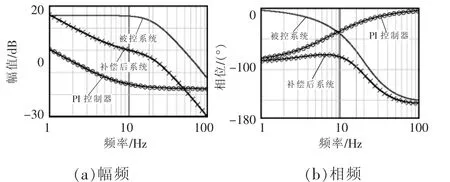
图9 5次谐波抑制环开环传递函数的波特图Fig.9 Bode plot of the 5th harmonic suppression loop’s open-loop transfer function
4 实验验证
为了验证谐波抑制环控制器设计,在一台三相四线制T型三电平逆变器平台进行了实验。实验平台主电路如图10所示,电路和控制环路的参数见表1和表2。
图11为加入3、5、7次谐波抑制环前后逆变电压vi和负载电流io的实验波形,并画出了vi经FFT变换得到的谐波频谱图。实验中加入谐波抑制环前后单相逆变器的输出视在功率都设置为8.0 kVA。由图可知,在未加谐波抑制环时,逆变电压畸变较为严重,电压的3、5、7次谐波分量较大,实测的电压THD为11.6%;加入谐波抑制环后,逆变电压的波形质量得到了改善,电压的3、5、7次谐波分量得到了完全抑制,实测的电压THD为1.6%。

图10 三相四线制T型三电平逆变器Fig.10 Three-phase four-wire T-type three-level inverter
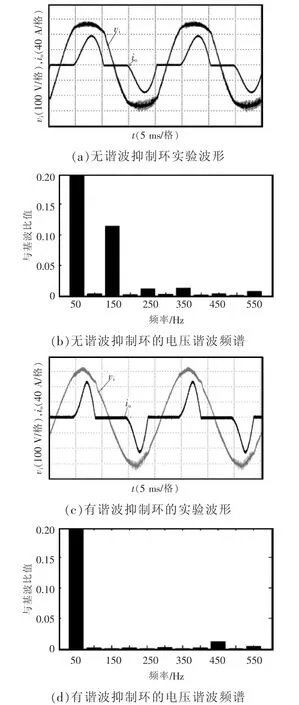
图11 谐波抑制环作用前后的电压电流实验波形和电压谐波频谱Fig.11 Voltage and current experimental waveforms and voltage viharmonic spectrum with or without harmonic suppression loop
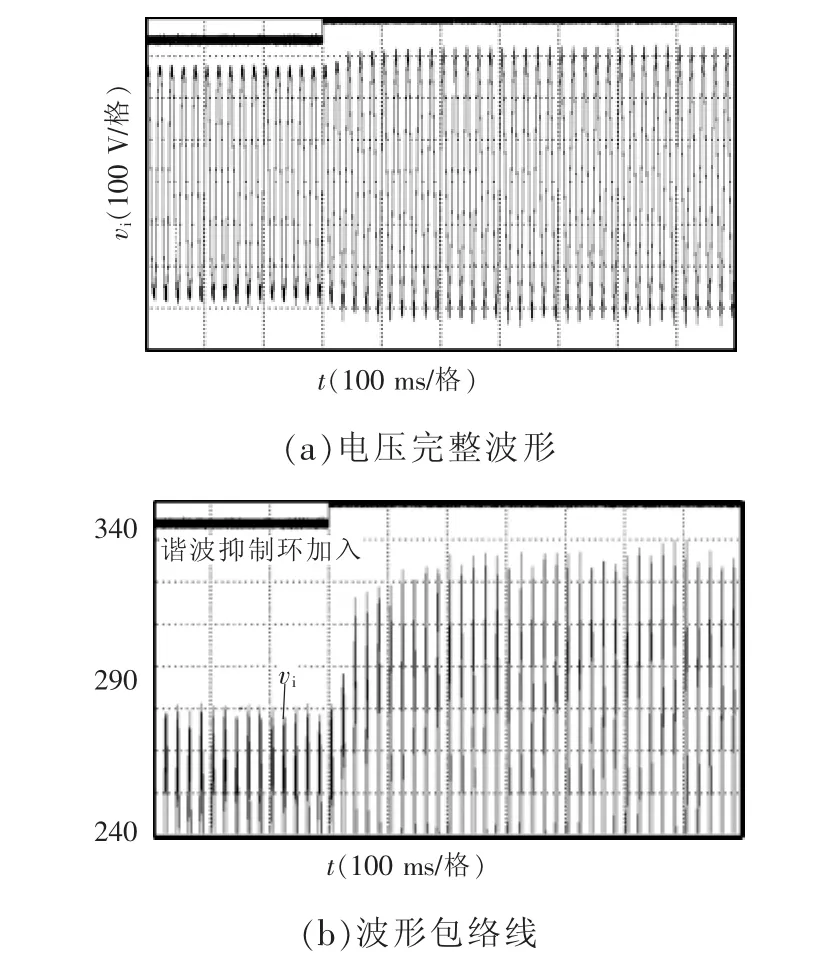
图12 加入谐波抑制环后逆变电压vi的动态调节波形Fig.12 Dynamic adjusting waveforms of inverter voltage viafter harmonic suppression loop was added

图13 加入谐波抑制环后负载电流io的动态调节波形Fig.13 Dynamic adjusting waveform of load current io after harmonic suppression loop was added
为了观察谐波抑制环的动态调节过程,控制谐波环在某一时刻加入,得到的逆变电压vi和负载电流io的动态调节波形分别如图12和图13所示。可以看到,在加入谐波抑制环后,负载电流约在0.2 s后达到稳定,且调节过程无过冲。
5 结语
本文推导了三相四线制UPS逆变器的谐波抑制环变换到dq0坐标系的动态模型,并讨论了环路的改进和控制器参数的设计。由推导结果可知,谐波抑制环动态模型中的传递函数在低频时近似为常数,且dq轴间存在耦合;改进控制环路后实现了dq轴在低频段的解耦。实验结果表明,依据推导的动态模型设计的谐波抑制环能消除指定次谐波,并改善输出电压的THD。
[1]Kim K H,Park N J,Hyun D S.Advanced synchronous reference frame controller for three-phase UPS powering unbalanced and nonlinear loads[C].2005 IEEE 36th Power Electronics Specialists Conference.Recife,Brazil,2005:1699-1704.
[2]YD/T 1095-2008,通信用不间断电源 (UPS)[S].中华人民共和国工业和信息化部,2008-07-28.LYD/T 1095-2008,Uninterruptible Power Systems for Communications[S].Ministry of Industry and Information Technology of the People's Republic of China,2008-07-28(in Chinese).
[3]Dong Dezhi,Zhang Anyang,Chen Min,et al.Suppression of voltage harmonics in single-phase inverters based on multi-voltage control[C].2013 28th Annual IEEE Applied Power Electronics Conference and Exposition (APEC),Long Beach,USA,2013:1492-1499.
[4]Mattavelli P,Fasolo S.Implementation of synchronous frame harmonic control for high-performance AC power supplies[C]//Conference Record of the 2000 IEEE.Industry Applications Conference,Rome,Italy,2000(3):1988-1995.
[5]Zmood D N,Holmes D G.Stationary frame current regulation of PWM inverters with zero steady-state error[J].IEEE Transactions on power electronics,2003,18(3):814-822.
[6]Liserre M,Teodorescu R,Blaabjerg F.Multiple harmonics control for three-phase grid converter systems with the use of PI-RES current controller in a rotating frame[J].IEEE Transactions on Power Electronics,2006,21(3):836-841.
[7]Kulka A,Undeland T,Vazquez S,et al.Stationary frame voltage harmonic controller for standalone power generation[C].2007 European Conference on Power Electronics and Applications.Aalborg,Denmark,2007:1-10.
[8]Escobar G,Valdez A A,Leyva-Ramos J,et al.Repetitivebased controller for a UPS inverter to compensate unbalance and harmonic distortion[J].IEEE Transactions on Industrial Electronics,2007,54(1):504-510.
[9]Zhou Keliang,Wang Danwei.Digital repetitive learning controller for three-phase CVCF PWM inverter[J].IEEE Transactions on Industrial Electronics,2001,48(4):820-830.
[10]Willmann G,Coutinho D F,Pereira L F A,et al.Multipleloop H-infinity control design for uninterruptible power supplies[J].IEEE Transactions on Industrial Electronics,2007,54(3):1591-1602.
[11]Abdel-Rahim N M,Quaicoe J E.Analysis and design of a multiple feedback loop control strategy for single-phase voltage-source UPS inverters[J].IEEE Transactions on Power Electronics,1996,11(4):532-541.
[12]徐德鸿.电力电子系统建模及控制[M].北京:机械工业出版社,2006.